 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Cross-View Localization in 6G Space-Air-Ground Integrated Network
Mar 12, 2026Recently, visual localization has become an important supplement to improve localization reliability, and cross-view approaches can greatly enhance coverage and adaptability. Meanwhile, future 6G will enable a globally covered mobile communication system, with a space-air-ground integrated network (SAGIN) serving as key supporting architecture. Inspired by this, we explore an integration of cross-view localization (CVL) with 6G SAGIN, thereby enhancing its performance in latency, energy consumption, and privacy protection. First, we provide a comprehensive review of CVL and SAGIN, highlighting their capabilities, integration opportunities, and potential applications. Benefiting from the fast and extensive image collection and transmission capabilities of the 6G SAGIN architecture, CVL achieves higher localization accuracy and faster processing speed. Then, we propose a split-inference framework for implementing CVL, which fully leverages the distributed communication and computing resources of the 6G SAGIN architecture. Subsequently, we conduct joint optimization of communication, computation, and confidentiality within the proposed split-inference framework, aiming to provide a paradigm and a direction for making CVL efficient. Experimental results validate the effectiveness of the proposed framework and provide solutions to the optimization problem. Finally, we discuss potential research directions for 6G SAGIN-enabled CVL.
Agentic AI for Embodied-enhanced Beam Prediction in Low-Altitude Economy Networks
Mar 12, 2026Millimeter-wave or terahertz communications can meet demands of low-altitude economy networks for high-throughput sensing and real-time decision making. However, high-frequency characteristics of wireless channels result in severe propagation loss and strong beam directivity, which make beam prediction challenging in highly mobile uncrewed aerial vehicles (UAV) scenarios. In this paper, we employ agentic AI to enable the transformation of mmWave base stations toward embodied intelligence. We innovatively design a multi-agent collaborative reasoning architecture for UAV-to-ground mmWave communications and propose a hybrid beam prediction model system based on bimodal data. The multi-agent architecture is designed to overcome the limited context window and weak controllability of large language model (LLM)-based reasoning by decomposing beam prediction into task analysis, solution planning, and completeness assessment. To align with the agentic reasoning process, a hybrid beam prediction model system is developed to process multimodal UAV data, including numeric mobility information and visual observations. The proposed hybrid model system integrates Mamba-based temporal modelling, convolutional visual encoding, and cross-attention-based multimodal fusion, and dynamically switches data-flow strategies under multi-agent guidance. Extensive simulations on a real UAV mmWave communication dataset demonstrate that proposed architecture and system achieve high prediction accuracy and robustness under diverse data conditions, with maximum top-1 accuracy reaching 96.57%.
To Talk or to Work: Delay Efficient Federated Learning over Mobile Edge Devices
Nov 01, 2021
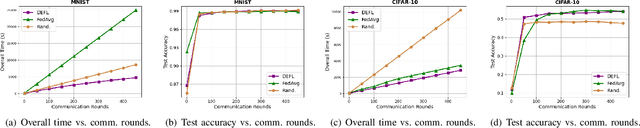
Federated learning (FL), an emerging distributed machine learning paradigm, in conflux with edge computing is a promising area with novel applications over mobile edge devices. In FL, since mobile devices collaborate to train a model based on their own data under the coordination of a central server by sharing just the model updates, training data is maintained private. However, without the central availability of data, computing nodes need to communicate the model updates often to attain convergence. Hence, the local computation time to create local model updates along with the time taken for transmitting them to and from the server result in a delay in the overall time. Furthermore, unreliable network connections may obstruct an efficient communication of these updates. To address these, in this paper, we propose a delay-efficient FL mechanism that reduces the overall time (consisting of both the computation and communication latencies) and communication rounds required for the model to converge. Exploring the impact of various parameters contributing to delay, we seek to balance the trade-off between wireless communication (to talk) and local computation (to work). We formulate a relation with overall time as an optimization problem and demonstrate the efficacy of our approach through extensive simulations.
Evaluation of Inference Attack Models for Deep Learning on Medical Data
Oct 31, 2020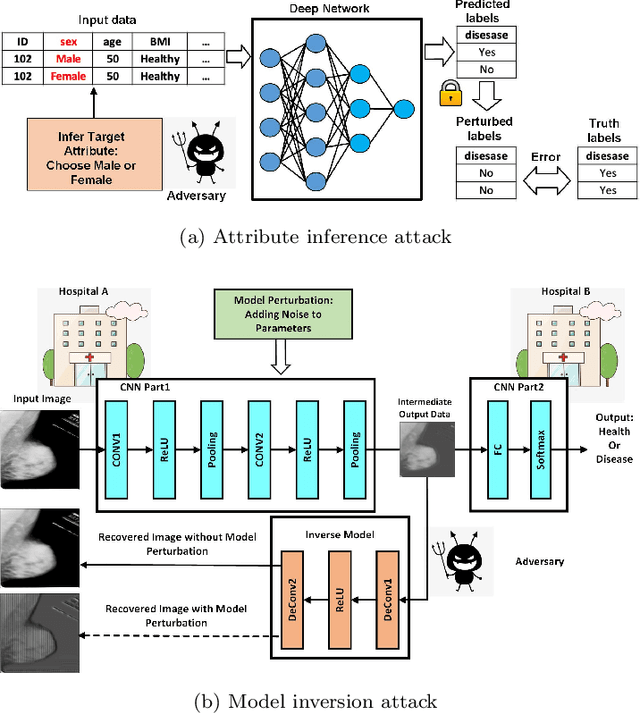
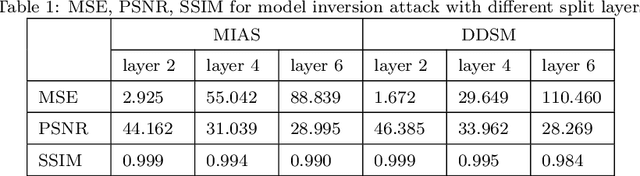
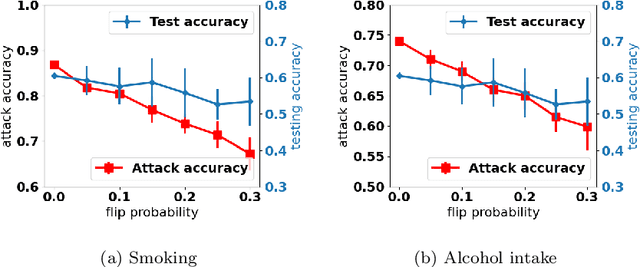
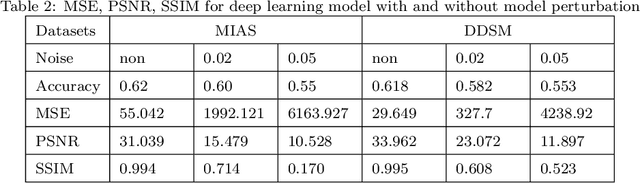
Deep learning has attracted broad interest in healthcare and medical communities. However, there has been little research into the privacy issues created by deep networks trained for medical applications. Recently developed inference attack algorithms indicate that images and text records can be reconstructed by malicious parties that have the ability to query deep networks. This gives rise to the concern that medical images and electronic health records containing sensitive patient information are vulnerable to these attacks. This paper aims to attract interest from researchers in the medical deep learning community to this important problem. We evaluate two prominent inference attack models, namely, attribute inference attack and model inversion attack. We show that they can reconstruct real-world medical images and clinical reports with high fidelity. We then investigate how to protect patients' privacy using defense mechanisms, such as label perturbation and model perturbation. We provide a comparison of attack results between the original and the medical deep learning models with defenses. The experimental evaluations show that our proposed defense approaches can effectively reduce the potential privacy leakage of medical deep learning from the inference attacks.