 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOrgan Shape Sensing using Pneumatically Attachable Flexible Rails in Robotic-Assisted Laparoscopic Surgery
Feb 22, 2022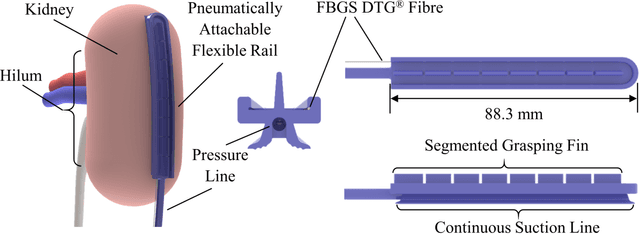
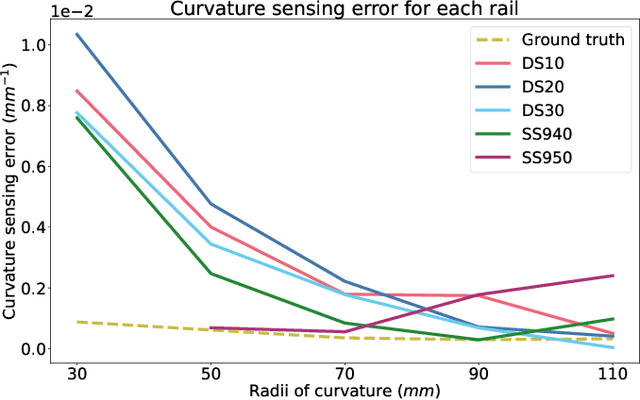
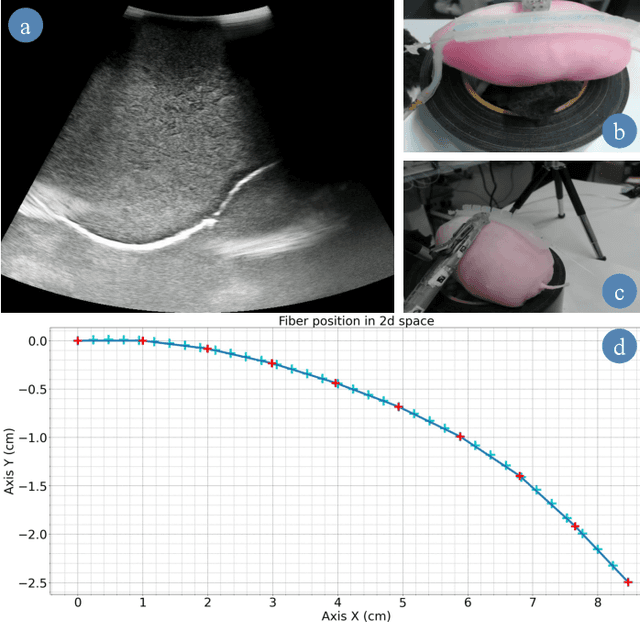
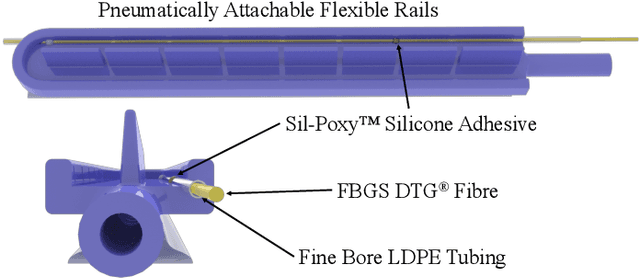
In robotic-assisted partial nephrectomy, surgeons remove a part of a kidney often due to the presence of a mass. A drop-in ultrasound probe paired to a surgical robot is deployed to execute multiple swipes over the kidney surface to localise the mass and define the margins of resection. This sub-task is challenging and must be performed by a highly skilled surgeon. Automating this sub-task may reduce cognitive load for the surgeon and improve patient outcomes. The overall goal of this work is to autonomously move the ultrasound probe on the surface of the kidney taking advantage of the use of the Pneumatically Attachable Flexible (PAF) rail system, a soft robotic device used for organ scanning and repositioning. First, we integrate a shape-sensing optical fibre into the PAF rail system to evaluate the curvature of target organs in robotic-assisted laparoscopic surgery. Then, we investigate the impact of the stiffness of the material of the PAF rail on the curvature sensing accuracy, considering that soft targets are present in the surgical field. Finally, we use shape sensing to plan the trajectory of the da Vinci surgical robot paired with a drop-in ultrasound probe and autonomously generate an Ultrasound scan of a kidney phantom.
A Novel Soft Shape-shifting Robot with Track-based Locomotion for In-pipe Inspection
Feb 22, 2022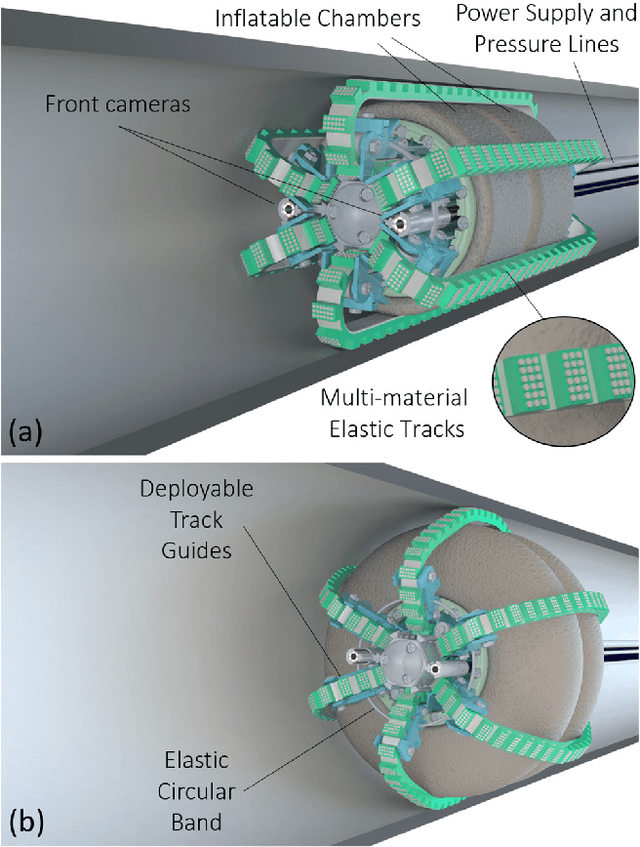
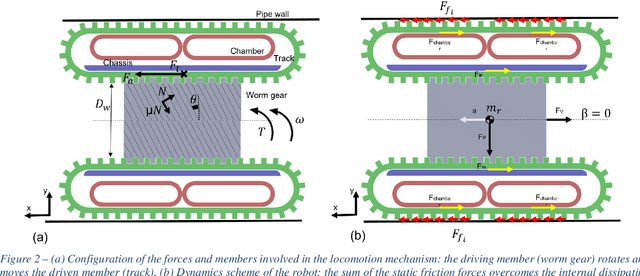
With the advent of soft robotics the research community has been exploring how to exploit the inherent adaptability of soft elastic materials to overcome the limitations of systems based on rigid materials. A proof-of-concept design of a crawling robot for pipe inspection and preliminary analysis of its locomotion capabilities are presented in this work. The novelty of the proposed design is the combination of silicone based elements of different stiffness to enable global shape reconfiguration and whole-body track-based locomotion. The proposed system makes use of a plurality of multi-materials elastic tracks actuated by an on-board motor through a worm gear that pairs with all of them, causing their constant eversion from the inside to the outside of the chassis of the robot. Two toroidal inflatable chambers surround the chassis of the robot while passing through the loops created by the tracks. Upon inflation of the chambers the tracks are deformed, changing the overall diameter of the system. This feature allows the system to adjust to the local diameter of the pipe navigated, enabling also active contact force control between the tracks and the pipe walls. We demonstrate how the proposed system efficiently moves through rigid pipes of different diameters, both straight and curved, incrementing its outer diameter up to 100% of his original size. Maximum navigation speed and stall force applied are evaluated. With two front cameras embedded, the proposed robotic system can represent a cost-effective and easy-to-control solution for inspection applications, when adaptability and compliance are critical requirements.
Towards intrinsic force sensing and control in parallel soft robots
Nov 19, 2021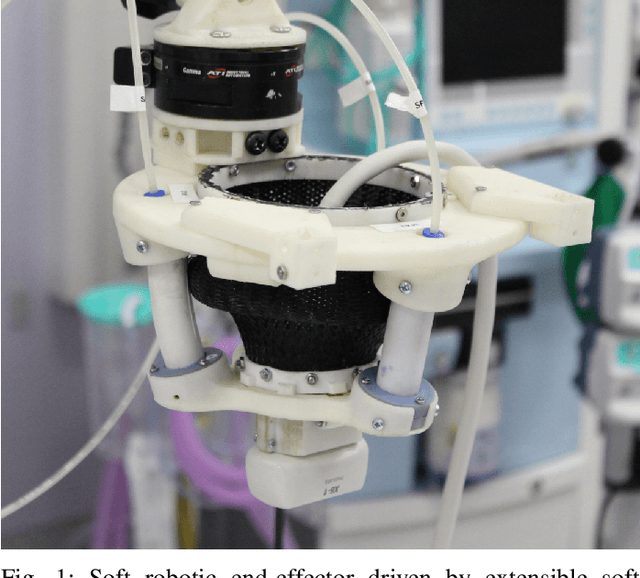
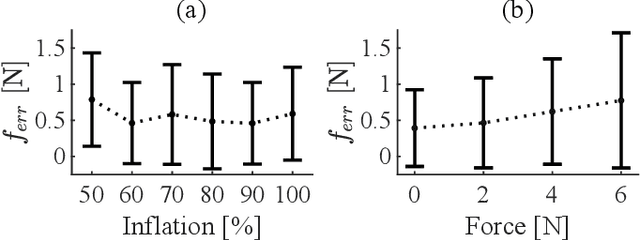
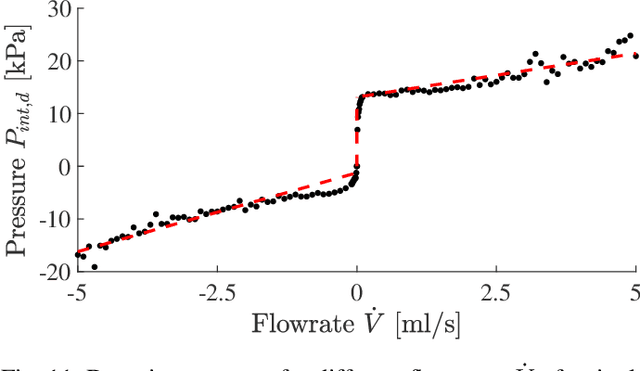
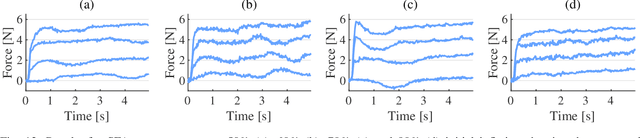
With soft robotics being increasingly employed in settings demanding high and controlled contact forces, recent research has demonstrated the use of soft robots to estimate or intrinsically sense forces without requiring external sensing mechanisms. Whilst this has mainly been shown in tendon-based continuum manipulators or deformable robots comprising of push-pull rod actuation, fluid drives still pose great challenges due to high actuation variability and nonlinear mechanical system responses. In this work we investigate the capabilities of a hydraulic, parallel soft robot to intrinsically sense and subsequently control contact forces. A comprehensive algorithm is derived for static, quasi-static and dynamic force sensing which relies on fluid volume and pressure information of the system. The algorithm is validated for a single degree-of-freedom soft fluidic actuator. Results indicate that axial forces acting on a single actuator can be estimated with an accuracy of 0.56 +- 0.66N within the validated range of 0 to 6N in a quasi-static configuration. The force sensing methodology is applied to force control in a single actuator as well as the coupled parallel robot. It can be seen that forces are accurately controllable for both systems, with the capability of controlling directional contact forces in case of the multi degree-of-freedom parallel soft robot.
Design and integration of a parallel, soft robotic end-effector for extracorporeal ultrasound
Jun 11, 2019
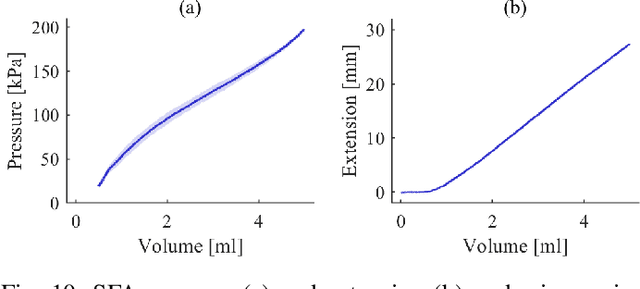
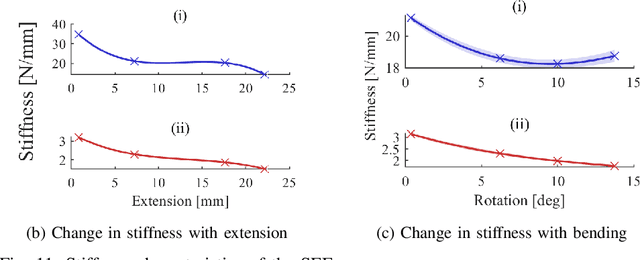
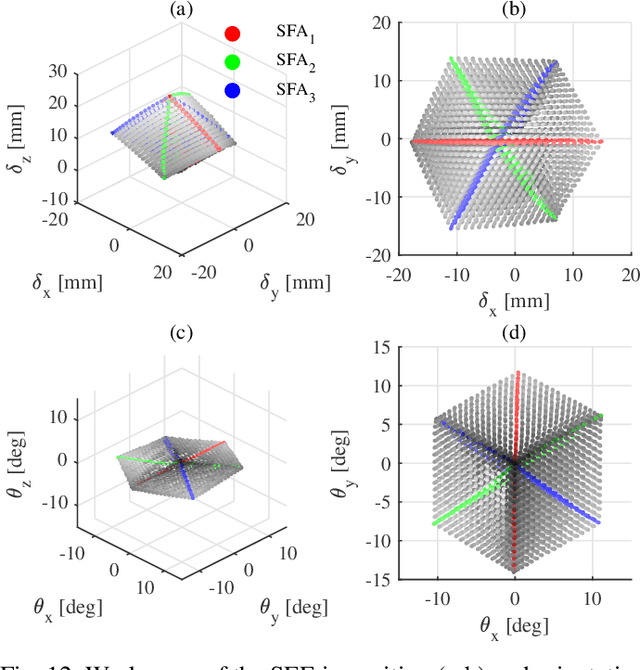
In this work we address limitations in state-of-the-art ultrasound robots by designing and integrating the first soft robotic system for ultrasound imaging. It makes use of the inherent qualities of soft robotics technologies to establish a safe, adaptable interaction between ultrasound probe and patient. We acquire clinical data to establish the movement ranges and force levels required in prenatal foetal ultrasound imaging and design our system accordingly. The end-effector's stiffness characteristics allow for it to reach the desired workspace while maintaining a stable contact between ultrasound probe and patient under the determined loads. The system exhibits a high degree of safety due to its inherent compliance in the transversal direction. We verify the mechanical characteristics of the end-effector, derive and validate a kinetostatic model and demonstrate the robot's controllability with and without external loading. The imaging capabilities of the robot are shown in a tele-operated setting on a foetal phantom. The design exhibits the desired stiffness characteristics with a high stiffness along the ultrasound transducer and a high compliance in lateral direction. Twist is constrained using a braided mesh reinforcement. The model can accurately predict the end-effector pose with a mean error of about 6% in position 7% in orientation. The derived controller is, with an average position error of 0.39mm able to track a target pose efficiently without and with externally applied loads. Finally, the images acquired with the system are of equally good quality compared to a manual sonographer scan.
Robotic-assisted Ultrasound for Fetal Imaging: Evolution from Single-arm to Dual-arm System
Apr 10, 2019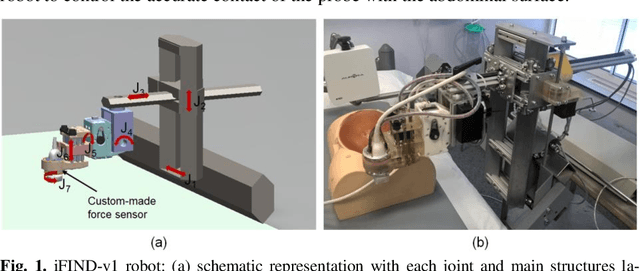
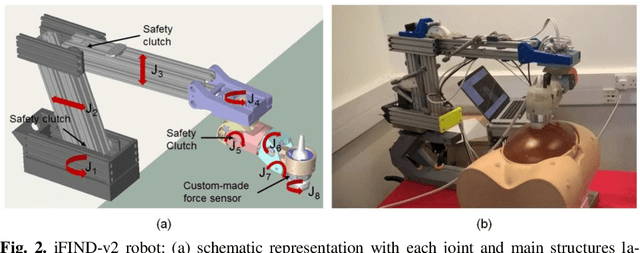
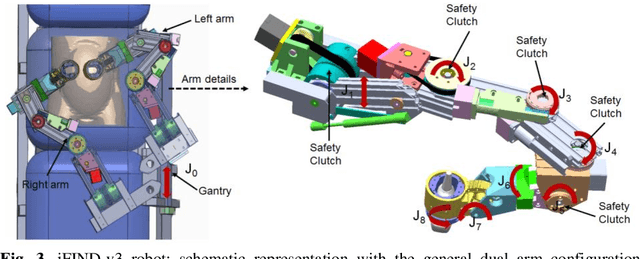
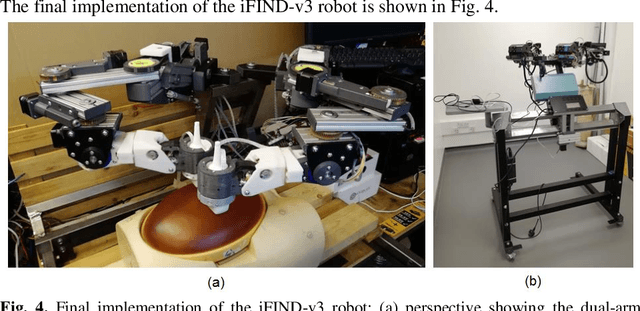
The development of robotic-assisted extracorporeal ultrasound systems has a long history and a number of projects have been proposed since the 1990s focusing on different technical aspects. These aim to resolve the deficiencies of on-site manual manipulation of hand-held ultrasound probes. This paper presents the recent ongoing developments of a series of bespoke robotic systems, including both single-arm and dual-arm versions, for a project known as intelligent Fetal Imaging and Diagnosis (iFIND). After a brief review of the development history of the extracorporeal ultrasound robotic system used for fetal and abdominal examinations, the specific aim of the iFIND robots, the design evolution, the implementation details of each version, and the initial clinical feedback of the iFIND robot series are presented. Based on the preliminary testing of these newly-proposed robots on 42 volunteers, the successful and re-liable working of the mechatronic systems were validated. Analysis of a participant questionnaire indicates a comfortable scanning experience for the volunteers and a good acceptance rate to being scanned by the robots.