 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign, Modelling and Characterisation of a Miniature Fibre-Reinforced Soft Bending Actuator for Endoluminal Interventions
Mar 25, 2026Miniaturised soft pneumatic actuators are crucial for robotic intervention within highly constrained anatomical pathways. This work presents the design and validation of a fibre-reinforced soft actuator at the centimetre scale for inte- gration into an endoluminal robotic platform for natural-orifice interventional and diagnostic applications. A single-chamber geometry reinforced with embedded Kevlar fibre was de- signed to maximise curvature while preserving sealing integrity, fabricated using a multi-stage multi-stiffness silicone casting process, and validated against a high-fidelity Abaqus FEM using experimentally parametrised hyperelastic material models and embedded beam reinforcement. The semi-cylindrical actuator has an outer diameter of 18,mm and a length of 37.5,mm. Single and double helix winding configurations, fibre pitch, and fibre density were investigated. The optimal 100 SH configuration achieved a bending angle of 202.9° experimentally and 297.6° in simulation, with structural robustness maintained up to 100,kPa and radial expansion effectively constrained by the fibre reinforcement. Workspace evaluation confirmed suitability for integration into the target device envelope, demonstrating that fibre-reinforcement strategies can be effectively translated to the centimetre regime while retaining actuator performance.
Organ Shape Sensing using Pneumatically Attachable Flexible Rails in Robotic-Assisted Laparoscopic Surgery
Feb 22, 2022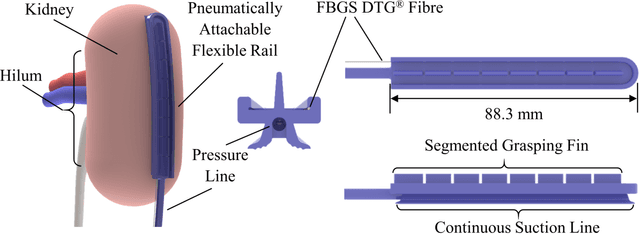
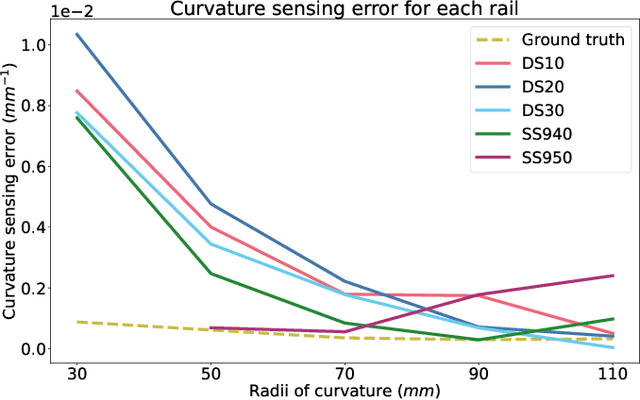
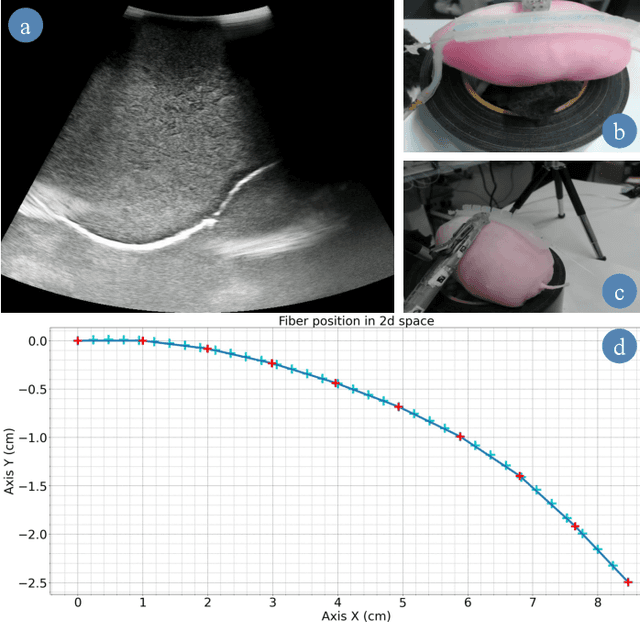
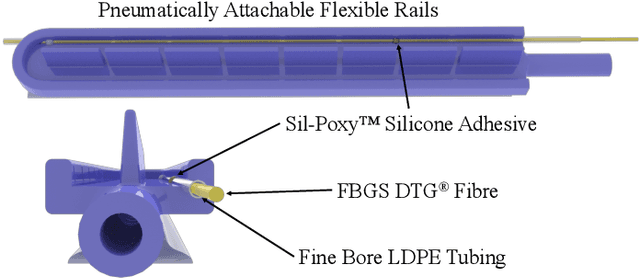
In robotic-assisted partial nephrectomy, surgeons remove a part of a kidney often due to the presence of a mass. A drop-in ultrasound probe paired to a surgical robot is deployed to execute multiple swipes over the kidney surface to localise the mass and define the margins of resection. This sub-task is challenging and must be performed by a highly skilled surgeon. Automating this sub-task may reduce cognitive load for the surgeon and improve patient outcomes. The overall goal of this work is to autonomously move the ultrasound probe on the surface of the kidney taking advantage of the use of the Pneumatically Attachable Flexible (PAF) rail system, a soft robotic device used for organ scanning and repositioning. First, we integrate a shape-sensing optical fibre into the PAF rail system to evaluate the curvature of target organs in robotic-assisted laparoscopic surgery. Then, we investigate the impact of the stiffness of the material of the PAF rail on the curvature sensing accuracy, considering that soft targets are present in the surgical field. Finally, we use shape sensing to plan the trajectory of the da Vinci surgical robot paired with a drop-in ultrasound probe and autonomously generate an Ultrasound scan of a kidney phantom.