 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDT-NVS: Diffusion Transformers for Novel View Synthesis
Nov 11, 2025Generating novel views of a natural scene, e.g., every-day scenes both indoors and outdoors, from a single view is an under-explored problem, even though it is an organic extension to the object-centric novel view synthesis. Existing diffusion-based approaches focus rather on small camera movements in real scenes or only consider unnatural object-centric scenes, limiting their potential applications in real-world settings. In this paper we move away from these constrained regimes and propose a 3D diffusion model trained with image-only losses on a large-scale dataset of real-world, multi-category, unaligned, and casually acquired videos of everyday scenes. We propose DT-NVS, a 3D-aware diffusion model for generalized novel view synthesis that exploits a transformer-based architecture backbone. We make significant contributions to transformer and self-attention architectures to translate images to 3d representations, and novel camera conditioning strategies to allow training on real-world unaligned datasets. In addition, we introduce a novel training paradigm swapping the role of reference frame between the conditioning image and the sampled noisy input. We evaluate our approach on the 3D task of generalized novel view synthesis from a single input image and show improvements over state-of-the-art 3D aware diffusion models and deterministic approaches, while generating diverse outputs.
Pixel3DMM: Versatile Screen-Space Priors for Single-Image 3D Face Reconstruction
May 01, 2025We address the 3D reconstruction of human faces from a single RGB image. To this end, we propose Pixel3DMM, a set of highly-generalized vision transformers which predict per-pixel geometric cues in order to constrain the optimization of a 3D morphable face model (3DMM). We exploit the latent features of the DINO foundation model, and introduce a tailored surface normal and uv-coordinate prediction head. We train our model by registering three high-quality 3D face datasets against the FLAME mesh topology, which results in a total of over 1,000 identities and 976K images. For 3D face reconstruction, we propose a FLAME fitting opitmization that solves for the 3DMM parameters from the uv-coordinate and normal estimates. To evaluate our method, we introduce a new benchmark for single-image face reconstruction, which features high diversity facial expressions, viewing angles, and ethnicities. Crucially, our benchmark is the first to evaluate both posed and neutral facial geometry. Ultimately, our method outperforms the most competitive baselines by over 15% in terms of geometric accuracy for posed facial expressions.
Unsupervised 2D-3D lifting of non-rigid objects using local constraints
Apr 27, 2025For non-rigid objects, predicting the 3D shape from 2D keypoint observations is ill-posed due to occlusions, and the need to disentangle changes in viewpoint and changes in shape. This challenge has often been addressed by embedding low-rank constraints into specialized models. These models can be hard to train, as they depend on finding a canonical way of aligning observations, before they can learn detailed geometry. These constraints have limited the reconstruction quality. We show that generic, high capacity models, trained with an unsupervised loss, allow for more accurate predicted shapes. In particular, applying low-rank constraints to localized subsets of the full shape allows the high capacity to be suitably constrained. We reduce the state-of-the-art reconstruction error on the S-Up3D dataset by over 70%.
Gen3DEval: Using vLLMs for Automatic Evaluation of Generated 3D Objects
Apr 10, 2025


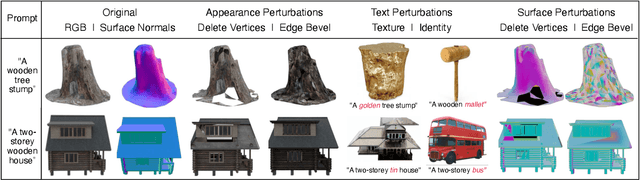
Rapid advancements in text-to-3D generation require robust and scalable evaluation metrics that align closely with human judgment, a need unmet by current metrics such as PSNR and CLIP, which require ground-truth data or focus only on prompt fidelity. To address this, we introduce Gen3DEval, a novel evaluation framework that leverages vision large language models (vLLMs) specifically fine-tuned for 3D object quality assessment. Gen3DEval evaluates text fidelity, appearance, and surface quality by analyzing 3D surface normals, without requiring ground-truth comparisons, bridging the gap between automated metrics and user preferences. Compared to state-of-the-art task-agnostic models, Gen3DEval demonstrates superior performance in user-aligned evaluations, placing it as a comprehensive and accessible benchmark for future research on text-to-3D generation. The project page can be found here: \href{https://shalini-maiti.github.io/gen3deval.github.io/}{https://shalini-maiti.github.io/gen3deval.github.io/}.
Pow3R: Empowering Unconstrained 3D Reconstruction with Camera and Scene Priors
Mar 21, 2025



We present Pow3r, a novel large 3D vision regression model that is highly versatile in the input modalities it accepts. Unlike previous feed-forward models that lack any mechanism to exploit known camera or scene priors at test time, Pow3r incorporates any combination of auxiliary information such as intrinsics, relative pose, dense or sparse depth, alongside input images, within a single network. Building upon the recent DUSt3R paradigm, a transformer-based architecture that leverages powerful pre-training, our lightweight and versatile conditioning acts as additional guidance for the network to predict more accurate estimates when auxiliary information is available. During training we feed the model with random subsets of modalities at each iteration, which enables the model to operate under different levels of known priors at test time. This in turn opens up new capabilities, such as performing inference in native image resolution, or point-cloud completion. Our experiments on 3D reconstruction, depth completion, multi-view depth prediction, multi-view stereo, and multi-view pose estimation tasks yield state-of-the-art results and confirm the effectiveness of Pow3r at exploiting all available information. The project webpage is https://europe.naverlabs.com/pow3r.
BillBoard Splatting (BBSplat): Learnable Textured Primitives for Novel View Synthesis
Nov 13, 2024



We present billboard Splatting (BBSplat) - a novel approach for 3D scene representation based on textured geometric primitives. BBSplat represents the scene as a set of optimizable textured planar primitives with learnable RGB textures and alpha-maps to control their shape. BBSplat primitives can be used in any Gaussian Splatting pipeline as drop-in replacements for Gaussians. Our method's qualitative and quantitative improvements over 3D and 2D Gaussians are most noticeable when fewer primitives are used, when BBSplat achieves over 1200 FPS. Our novel regularization term encourages textures to have a sparser structure, unlocking an efficient compression that leads to a reduction in storage space of the model. Our experiments show the efficiency of BBSplat on standard datasets of real indoor and outdoor scenes such as Tanks&Temples, DTU, and Mip-NeRF-360. We demonstrate improvements on PSNR, SSIM, and LPIPS metrics compared to the state-of-the-art, especially for the case when fewer primitives are used, which, on the other hand, leads to up to 2 times inference speed improvement for the same rendering quality.
3D Reconstruction with Spatial Memory
Aug 28, 2024We present Spann3R, a novel approach for dense 3D reconstruction from ordered or unordered image collections. Built on the DUSt3R paradigm, Spann3R uses a transformer-based architecture to directly regress pointmaps from images without any prior knowledge of the scene or camera parameters. Unlike DUSt3R, which predicts per image-pair pointmaps each expressed in its local coordinate frame, Spann3R can predict per-image pointmaps expressed in a global coordinate system, thus eliminating the need for optimization-based global alignment. The key idea of Spann3R is to manage an external spatial memory that learns to keep track of all previous relevant 3D information. Spann3R then queries this spatial memory to predict the 3D structure of the next frame in a global coordinate system. Taking advantage of DUSt3R's pre-trained weights, and further fine-tuning on a subset of datasets, Spann3R shows competitive performance and generalization ability on various unseen datasets and can process ordered image collections in real time. Project page: \url{https://hengyiwang.github.io/projects/spanner}
RecMoDiffuse: Recurrent Flow Diffusion for Human Motion Generation
Jun 11, 2024



Human motion generation has paramount importance in computer animation. It is a challenging generative temporal modelling task due to the vast possibilities of human motion, high human sensitivity to motion coherence and the difficulty of accurately generating fine-grained motions. Recently, diffusion methods have been proposed for human motion generation due to their high sample quality and expressiveness. However, generated sequences still suffer from motion incoherence, and are limited to short duration, and simpler motion and take considerable time during inference. To address these limitations, we propose \textit{RecMoDiffuse: Recurrent Flow Diffusion}, a new recurrent diffusion formulation for temporal modelling. Unlike previous work, which applies diffusion to the whole sequence without any temporal dependency, an approach that inherently makes temporal consistency hard to achieve. Our method explicitly enforces temporal constraints with the means of normalizing flow models in the diffusion process and thereby extends diffusion to the temporal dimension. We demonstrate the effectiveness of RecMoDiffuse in the temporal modelling of human motion. Our experiments show that RecMoDiffuse achieves comparable results with state-of-the-art methods while generating coherent motion sequences and reducing the computational overhead in the inference stage.
NPGA: Neural Parametric Gaussian Avatars
May 29, 2024



The creation of high-fidelity, digital versions of human heads is an important stepping stone in the process of further integrating virtual components into our everyday lives. Constructing such avatars is a challenging research problem, due to a high demand for photo-realism and real-time rendering performance. In this work, we propose Neural Parametric Gaussian Avatars (NPGA), a data-driven approach to create high-fidelity, controllable avatars from multi-view video recordings. We build our method around 3D Gaussian Splatting for its highly efficient rendering and to inherit the topological flexibility of point clouds. In contrast to previous work, we condition our avatars' dynamics on the rich expression space of neural parametric head models (NPHM), instead of mesh-based 3DMMs. To this end, we distill the backward deformation field of our underlying NPHM into forward deformations which are compatible with rasterization-based rendering. All remaining fine-scale, expression-dependent details are learned from the multi-view videos. To increase the representational capacity of our avatars, we augment the canonical Gaussian point cloud using per-primitive latent features which govern its dynamic behavior. To regularize this increased dynamic expressivity, we propose Laplacian terms on the latent features and predicted dynamics. We evaluate our method on the public NeRSemble dataset, demonstrating that NPGA significantly outperforms the previous state-of-the-art avatars on the self-reenactment task by 2.6 PSNR. Furthermore, we demonstrate accurate animation capabilities from real-world monocular videos.
HAHA: Highly Articulated Gaussian Human Avatars with Textured Mesh Prior
Apr 01, 2024We present HAHA - a novel approach for animatable human avatar generation from monocular input videos. The proposed method relies on learning the trade-off between the use of Gaussian splatting and a textured mesh for efficient and high fidelity rendering. We demonstrate its efficiency to animate and render full-body human avatars controlled via the SMPL-X parametric model. Our model learns to apply Gaussian splatting only in areas of the SMPL-X mesh where it is necessary, like hair and out-of-mesh clothing. This results in a minimal number of Gaussians being used to represent the full avatar, and reduced rendering artifacts. This allows us to handle the animation of small body parts such as fingers that are traditionally disregarded. We demonstrate the effectiveness of our approach on two open datasets: SnapshotPeople and X-Humans. Our method demonstrates on par reconstruction quality to the state-of-the-art on SnapshotPeople, while using less than a third of Gaussians. HAHA outperforms previous state-of-the-art on novel poses from X-Humans both quantitatively and qualitatively.