 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRIPCN: A Road Impedance Principal Component Network for Probabilistic Traffic Flow Forecasting
Dec 25, 2025Accurate traffic flow forecasting is crucial for intelligent transportation services such as navigation and ride-hailing. In such applications, uncertainty estimation in forecasting is important because it helps evaluate traffic risk levels, assess forecast reliability, and provide timely warnings. As a result, probabilistic traffic flow forecasting (PTFF) has gained significant attention, as it produces both point forecasts and uncertainty estimates. However, existing PTFF approaches still face two key challenges: (1) how to uncover and model the causes of traffic flow uncertainty for reliable forecasting, and (2) how to capture the spatiotemporal correlations of uncertainty for accurate prediction. To address these challenges, we propose RIPCN, a Road Impedance Principal Component Network that integrates domain-specific transportation theory with spatiotemporal principal component learning for PTFF. RIPCN introduces a dynamic impedance evolution network that captures directional traffic transfer patterns driven by road congestion level and flow variability, revealing the direct causes of uncertainty and enhancing both reliability and interpretability. In addition, a principal component network is designed to forecast the dominant eigenvectors of future flow covariance, enabling the model to capture spatiotemporal uncertainty correlations. This design allows for accurate and efficient uncertainty estimation while also improving point prediction performance. Experimental results on real-world datasets show that our approach outperforms existing probabilistic forecasting methods.
GLM-4.1V-Thinking: Towards Versatile Multimodal Reasoning with Scalable Reinforcement Learning
Jul 02, 2025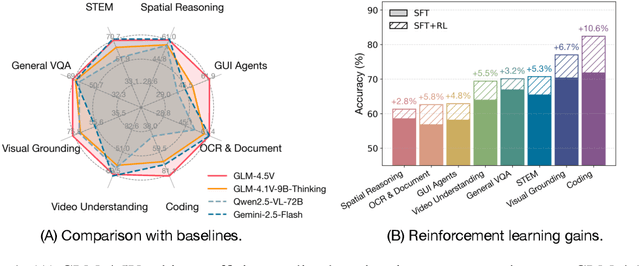
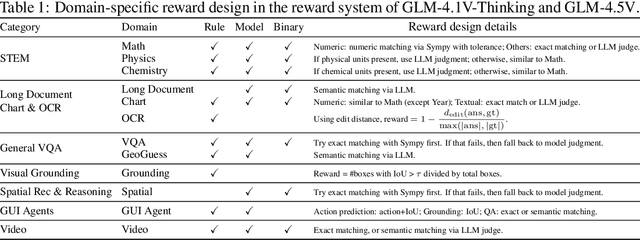
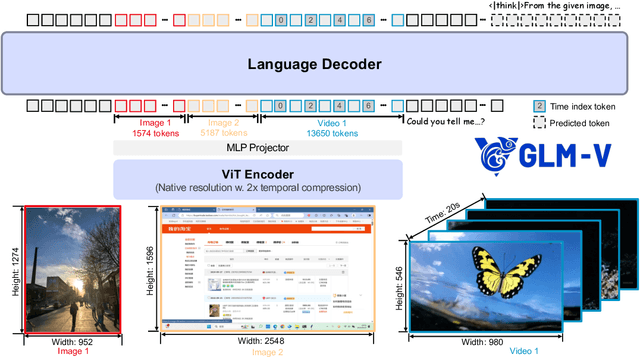

We present GLM-4.1V-Thinking, a vision-language model (VLM) designed to advance general-purpose multimodal understanding and reasoning. In this report, we share our key findings in the development of the reasoning-centric training framework. We first develop a capable vision foundation model with significant potential through large-scale pre-training, which arguably sets the upper bound for the final performance. We then propose Reinforcement Learning with Curriculum Sampling (RLCS) to unlock the full potential of the model, leading to comprehensive capability enhancement across a diverse range of tasks, including STEM problem solving, video understanding, content recognition, coding, grounding, GUI-based agents, and long document understanding. We open-source GLM-4.1V-9B-Thinking, which achieves state-of-the-art performance among models of comparable size. In a comprehensive evaluation across 28 public benchmarks, our model outperforms Qwen2.5-VL-7B on nearly all tasks and achieves comparable or even superior performance on 18 benchmarks relative to the significantly larger Qwen2.5-VL-72B. Notably, GLM-4.1V-9B-Thinking also demonstrates competitive or superior performance compared to closed-source models such as GPT-4o on challenging tasks including long document understanding and STEM reasoning, further underscoring its strong capabilities. Code, models and more information are released at https://github.com/THUDM/GLM-4.1V-Thinking.
Mobility-LLM: Learning Visiting Intentions and Travel Preferences from Human Mobility Data with Large Language Models
Oct 29, 2024



Location-based services (LBS) have accumulated extensive human mobility data on diverse behaviors through check-in sequences. These sequences offer valuable insights into users' intentions and preferences. Yet, existing models analyzing check-in sequences fail to consider the semantics contained in these sequences, which closely reflect human visiting intentions and travel preferences, leading to an incomplete comprehension. Drawing inspiration from the exceptional semantic understanding and contextual information processing capabilities of large language models (LLMs) across various domains, we present Mobility-LLM, a novel framework that leverages LLMs to analyze check-in sequences for multiple tasks. Since LLMs cannot directly interpret check-ins, we reprogram these sequences to help LLMs comprehensively understand the semantics of human visiting intentions and travel preferences. Specifically, we introduce a visiting intention memory network (VIMN) to capture the visiting intentions at each record, along with a shared pool of human travel preference prompts (HTPP) to guide the LLM in understanding users' travel preferences. These components enhance the model's ability to extract and leverage semantic information from human mobility data effectively. Extensive experiments on four benchmark datasets and three downstream tasks demonstrate that our approach significantly outperforms existing models, underscoring the effectiveness of Mobility-LLM in advancing our understanding of human mobility data within LBS contexts.
Spatial-Temporal Cross-View Contrastive Pre-training for Check-in Sequence Representation Learning
Jul 25, 2024



The rapid growth of location-based services (LBS) has yielded massive amounts of data on human mobility. Effectively extracting meaningful representations for user-generated check-in sequences is pivotal for facilitating various downstream services. However, the user-generated check-in data are simultaneously influenced by the surrounding objective circumstances and the user's subjective intention. Specifically, the temporal uncertainty and spatial diversity exhibited in check-in data make it difficult to capture the macroscopic spatial-temporal patterns of users and to understand the semantics of user mobility activities. Furthermore, the distinct characteristics of the temporal and spatial information in check-in sequences call for an effective fusion method to incorporate these two types of information. In this paper, we propose a novel Spatial-Temporal Cross-view Contrastive Representation (STCCR) framework for check-in sequence representation learning. Specifically, STCCR addresses the above challenges by employing self-supervision from "spatial topic" and "temporal intention" views, facilitating effective fusion of spatial and temporal information at the semantic level. Besides, STCCR leverages contrastive clustering to uncover users' shared spatial topics from diverse mobility activities, while employing angular momentum contrast to mitigate the impact of temporal uncertainty and noise. We extensively evaluate STCCR on three real-world datasets and demonstrate its superior performance across three downstream tasks.