 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePOGEMA: Partially Observable Grid Environment for Multiple Agents
Jun 22, 2022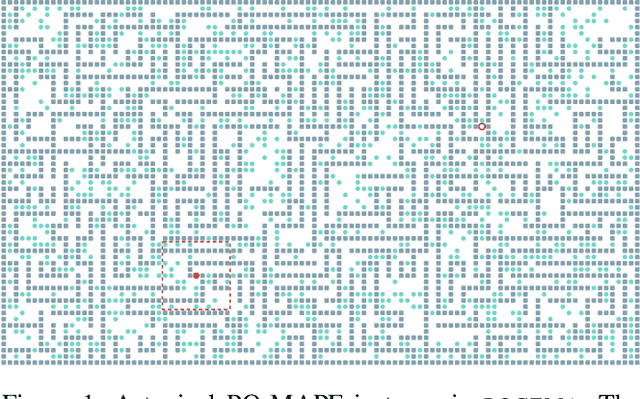
We introduce POGEMA (https://github.com/AIRI-Institute/pogema) a sandbox for challenging partially observable multi-agent pathfinding (PO-MAPF) problems . This is a grid-based environment that was specifically designed to be a flexible, tunable and scalable benchmark. It can be tailored to a variety of PO-MAPF, which can serve as an excellent testing ground for planning and learning methods, and their combination, which will allow us to move towards filling the gap between AI planning and learning.
Enhancing exploration algorithms for navigation with visual SLAM
Oct 18, 2021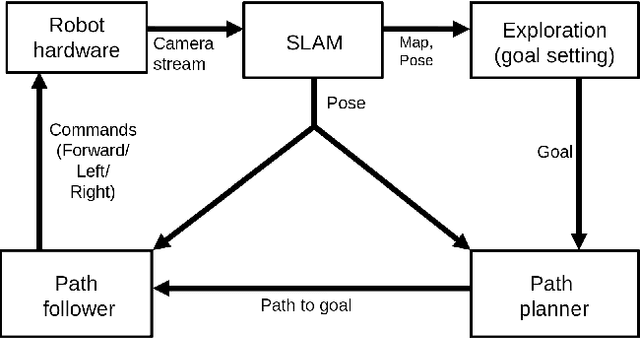
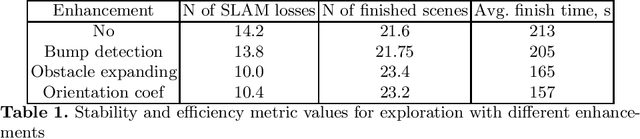
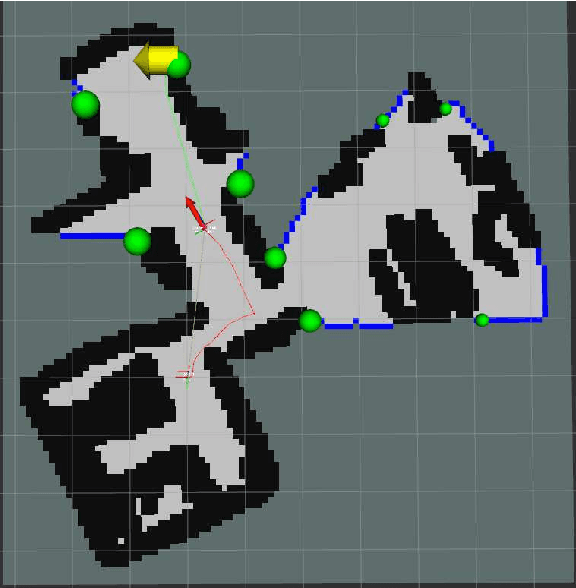
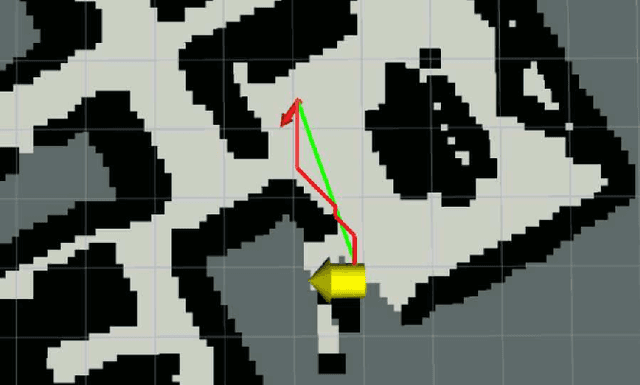
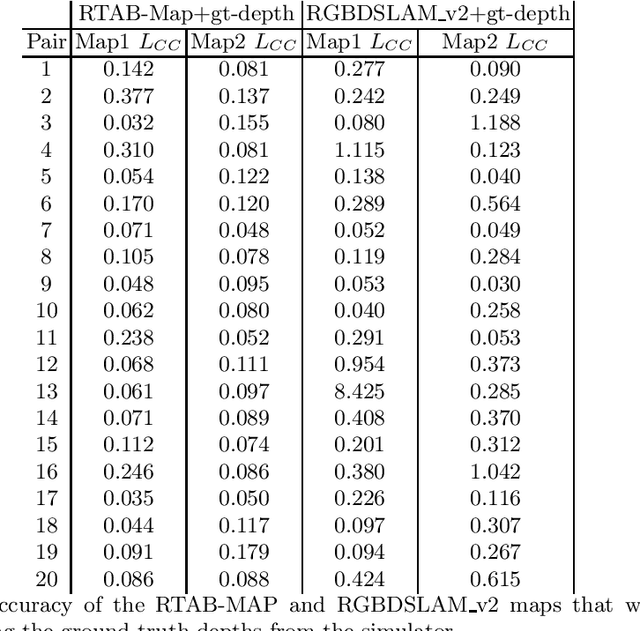
Exploration is an important step in autonomous navigation of robotic systems. In this paper we introduce a series of enhancements for exploration algorithms in order to use them with vision-based simultaneous localization and mapping (vSLAM) methods. We evaluate developed approaches in photo-realistic simulator in two modes: with ground-truth depths and neural network reconstructed depth maps as vSLAM input. We evaluate standard metrics in order to estimate exploration coverage.
Augmenting GRIPS with Heuristic Sampling for Planning Feasible Trajectories of a Car-Like Robot
Aug 15, 2021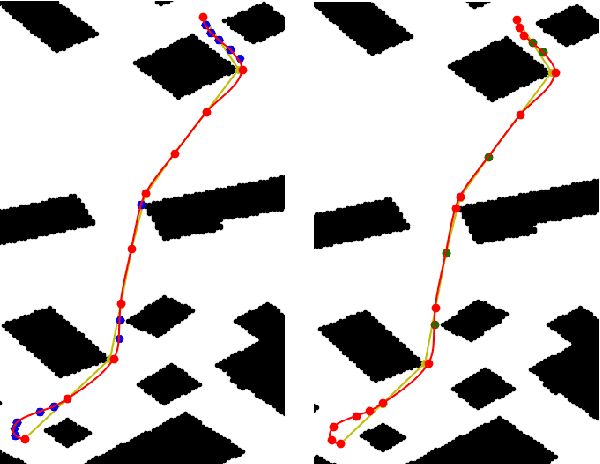
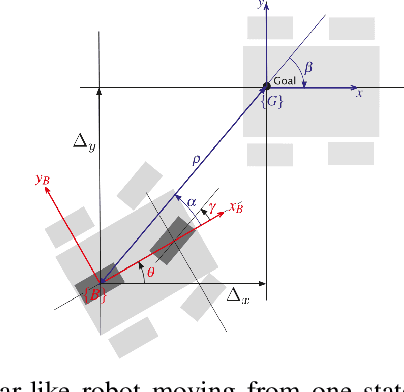
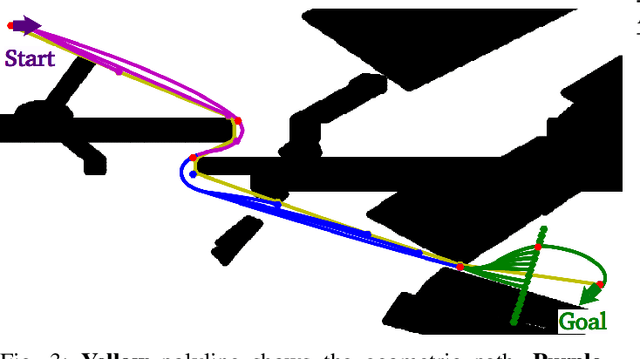
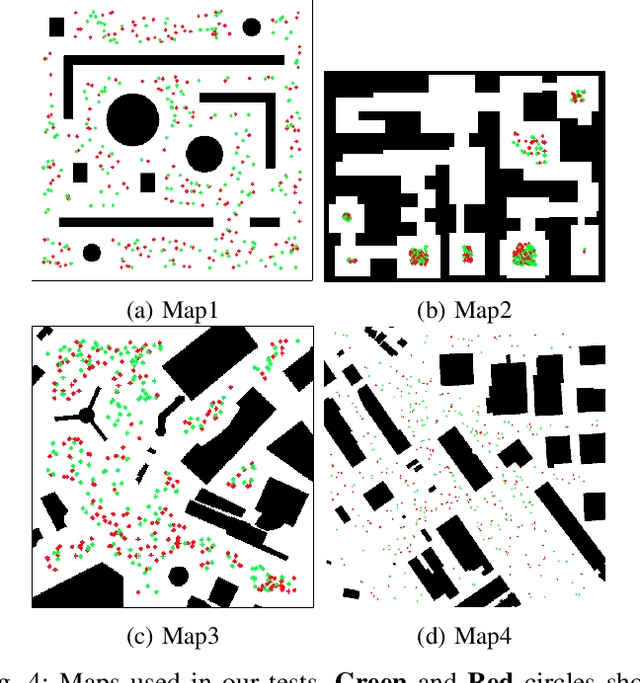
Kinodynamic motion planning for non-holomonic mobile robots is a challenging problem that is lacking a universal solution. One of the computationally efficient ways to solve it is to build a geometric path first and then transform this path into a kinematically feasible one. Gradient-informed Path Smoothing (GRIPS) is a recently introduced method for such transformation. GRIPS iteratively deforms the path and adds/deletes the waypoints while trying to connect each consecutive pair of them via the provided steering function that respects the kinematic constraints. The algorithm is relatively fast but, unfortunately, does not provide any guarantees that it will succeed. In practice, it often fails to produce feasible trajectories for car-like robots with large turning radius. In this work, we introduce a range of modifications that are aimed at increasing the success rate of GRIPS for car-like robots. The main enhancement is adding the additional step that heuristically samples waypoints along the bottleneck parts of the geometric paths (such as sharp turns). The results of the experimental evaluation provide a clear evidence that the success rate of the suggested algorithm is up to 40% higher compared to the original GRIPS and hits the bar of 90%, while its runtime is lower.
Q-Mixing Network for Multi-Agent Pathfinding in Partially Observable Grid Environments
Aug 13, 2021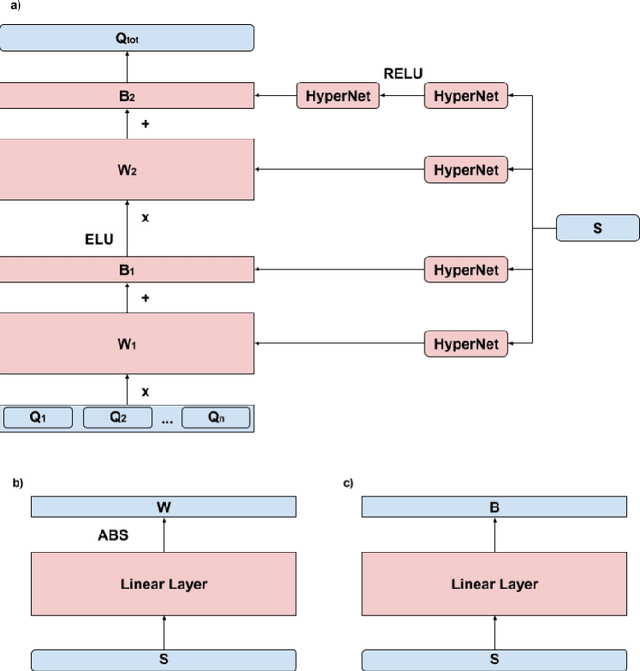

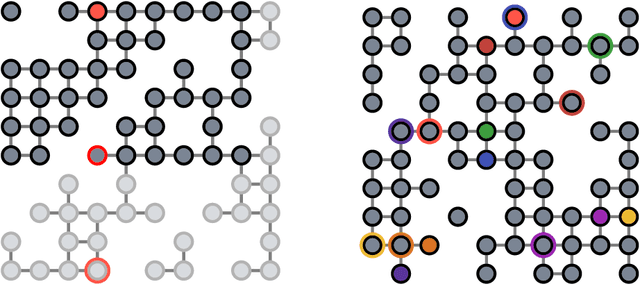

In this paper, we consider the problem of multi-agent navigation in partially observable grid environments. This problem is challenging for centralized planning approaches as they, typically, rely on the full knowledge of the environment. We suggest utilizing the reinforcement learning approach when the agents, first, learn the policies that map observations to actions and then follow these policies to reach their goals. To tackle the challenge associated with learning cooperative behavior, i.e. in many cases agents need to yield to each other to accomplish a mission, we use a mixing Q-network that complements learning individual policies. In the experimental evaluation, we show that such approach leads to plausible results and scales well to large number of agents.
Prioritized SIPP for Multi-Agent Path Finding With Kinematic Constraints
Aug 11, 2021
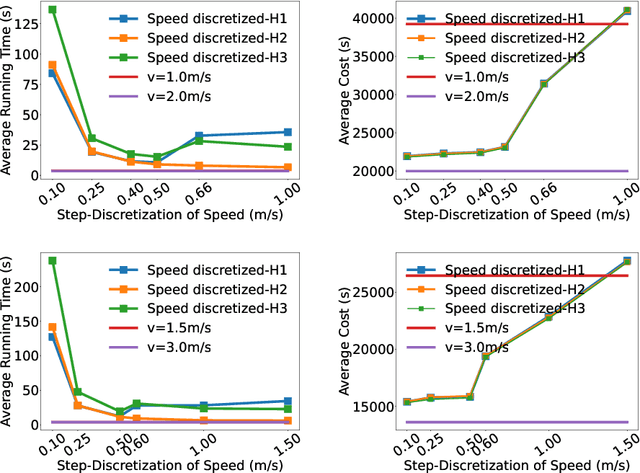
Multi-Agent Path Finding (MAPF) is a long-standing problem in Robotics and Artificial Intelligence in which one needs to find a set of collision-free paths for a group of mobile agents (robots) operating in the shared workspace. Due to its importance, the problem is well-studied and multiple optimal and approximate algorithms are known. However, many of them abstract away from the kinematic constraints and assume that the agents can accelerate/decelerate instantaneously. This complicates the application of the algorithms on the real robots. In this paper, we present a method that mitigates this issue to a certain extent. The suggested solver is essentially, a prioritized planner based on the well-known Safe Interval Path Planning (SIPP) algorithm. Within SIPP we explicitly reason about the speed and the acceleration thus the constructed plans directly take kinematic constraints of agents into account. We suggest a range of heuristic functions for that setting and conduct a thorough empirical evaluation of the suggested algorithm.
MAOMaps: A Photo-Realistic Benchmark For vSLAM and Map Merging Quality Assessment
May 31, 2021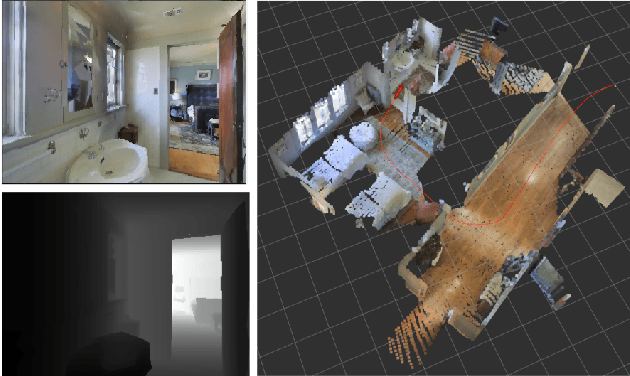
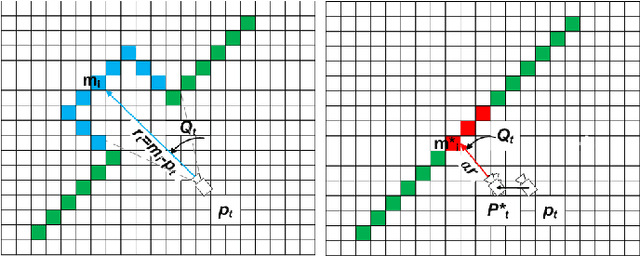
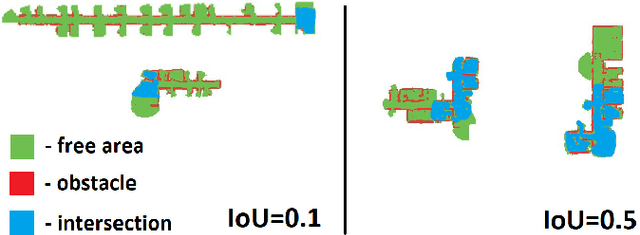
Running numerous experiments in simulation is a necessary step before deploying a control system on a real robot. In this paper we introduce a novel benchmark that is aimed at quantitatively evaluating the quality of vision-based simultaneous localization and mapping (vSLAM) and map merging algorithms. The benchmark consists of both a dataset and a set of tools for automatic evaluation. The dataset is photo-realistic and provides both the localization and the map ground truth data. This makes it possible to evaluate not only the localization part of the SLAM pipeline but the mapping part as well. To compare the vSLAM-built maps and the ground-truth ones we introduce a novel way to find correspondences between them that takes the SLAM context into account (as opposed to other approaches like nearest neighbors). The benchmark is ROS-compatable and is open-sourced to the community. The data and the code are available at: \texttt{github.com/CnnDepth/MAOMaps}.
Towards Time-Optimal Any-Angle Path Planning With Dynamic Obstacles
Apr 14, 2021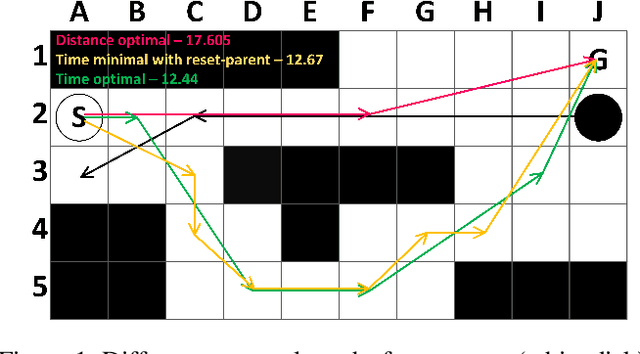

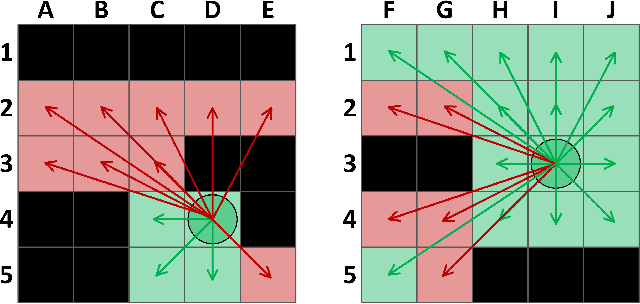

Path finding is a well-studied problem in AI, which is often framed as graph search. Any-angle path finding is a technique that augments the initial graph with additional edges to build shorter paths to the goal. Indeed, optimal algorithms for any-angle path finding in static environments exist. However, when dynamic obstacles are present and time is the objective to be minimized, these algorithms can no longer guarantee optimality. In this work, we elaborate on why this is the case and what techniques can be used to solve the problem optimally. We present two algorithms, grounded in the same idea, that can obtain provably optimal solutions to the considered problem. One of them is a naive algorithm and the other one is much more involved. We conduct a thorough empirical evaluation showing that, in certain setups, the latter algorithm might be as fast as the previously-known greedy non-optimal solver while providing solutions of better quality. In some (rare) cases, the difference in cost is up to 76%, while on average it is lower than one percent (the same cost difference is typically observed between optimal and greedy any-angle solvers in static environments).
Improving Continuous-time Conflict Based Search
Jan 24, 2021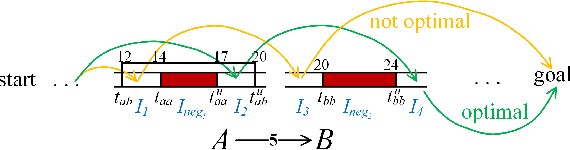

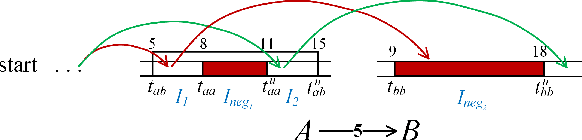
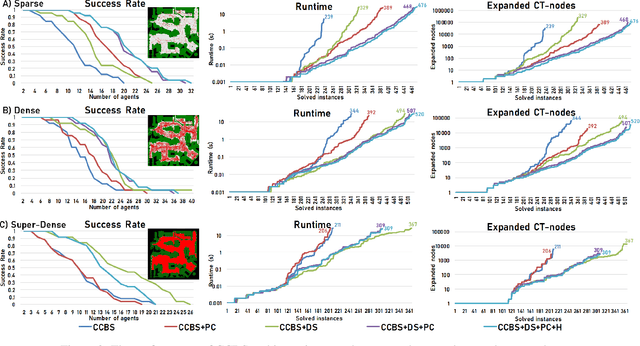
Conflict-Based Search (CBS) is a powerful algorithmic framework for optimally solving classical multi-agent path finding (MAPF) problems, where time is discretized into the time steps. Continuous-time CBS (CCBS) is a recently proposed version of CBS that guarantees optimal solutions without the need to discretize time. However, the scalability of CCBS is limited because it does not include any known improvements of CBS. In this paper, we begin to close this gap and explore how to adapt successful CBS improvements, namely, prioritizing conflicts (PC), disjoint splitting (DS), and high-level heuristics, to the continuous time setting of CCBS. These adaptions are not trivial, and require careful handling of different types of constraints, applying a generalized version of the Safe interval path planning (SIPP) algorithm, and extending the notion of cardinal conflicts. We evaluate the effect of the suggested enhancements by running experiments both on general graphs and $2^k$-neighborhood grids. CCBS with these improvements significantly outperforms vanilla CCBS, solving problems with almost twice as many agents in some cases and pushing the limits of multiagent path finding in continuous-time domains.
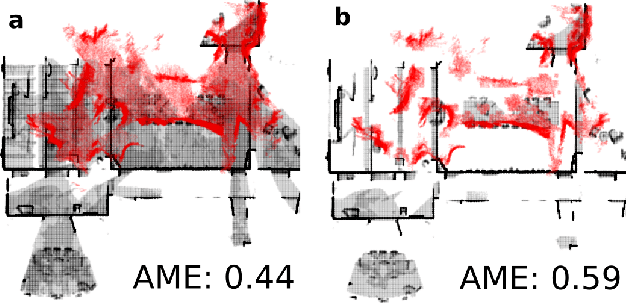
Map-merging Algorithms for Visual SLAM: Feasibility Study and Empirical Evaluation
Sep 12, 2020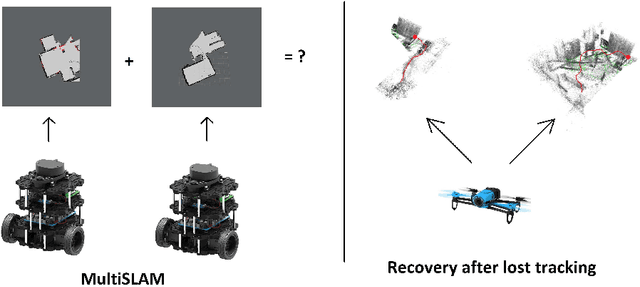
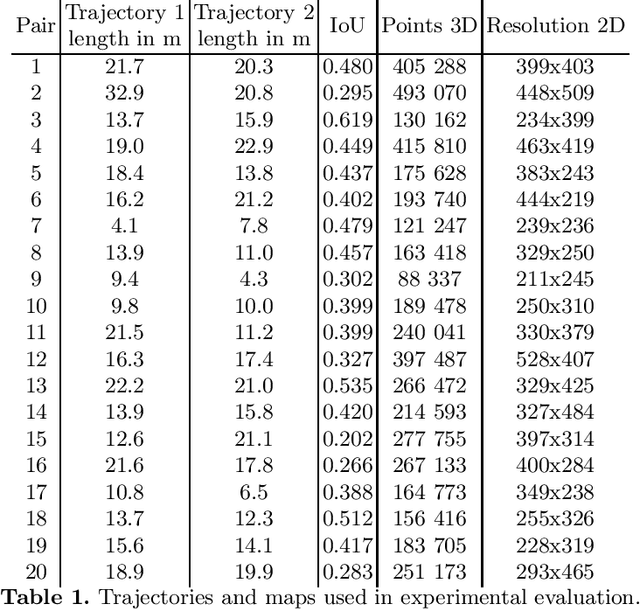
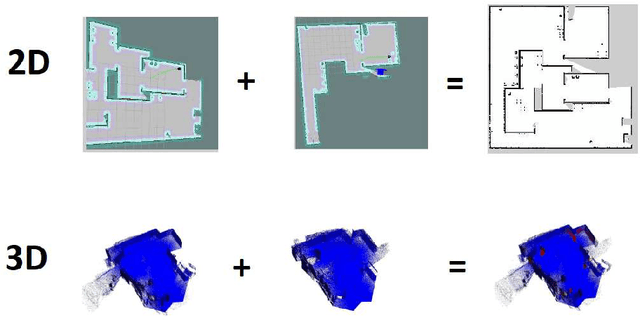
Simultaneous localization and mapping, especially the one relying solely on video data (vSLAM), is a challenging problem that has been extensively studied in robotics and computer vision. State-of-the-art vSLAM algorithms are capable of constructing accurate-enough maps that enable a mobile robot to autonomously navigate an unknown environment. In this work, we are interested in an important problem related to vSLAM, i.e. map merging, that might appear in various practically important scenarios, e.g. in a multi-robot coverage scenario. This problem asks whether different vSLAM maps can be merged into a consistent single representation. We examine the existing 2D and 3D map-merging algorithms and conduct an extensive empirical evaluation in realistic simulated environment (Habitat). Both qualitative and quantitative comparison is carried out and the obtained results are reported and analyzed.
Planning to Score a Goal in Robotic Football with Heuristic Search
Aug 04, 2020
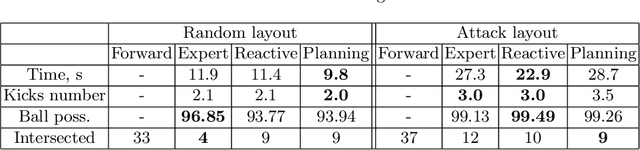
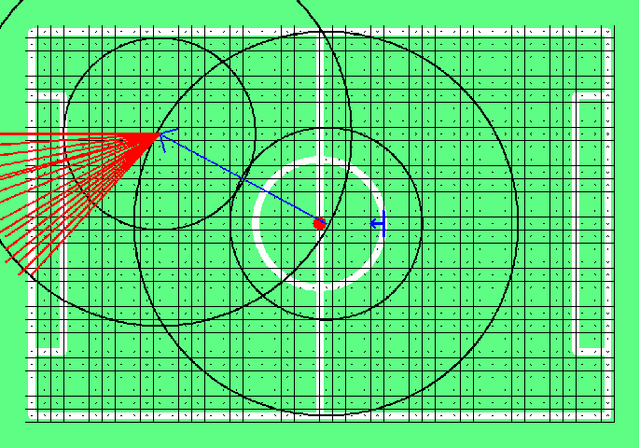
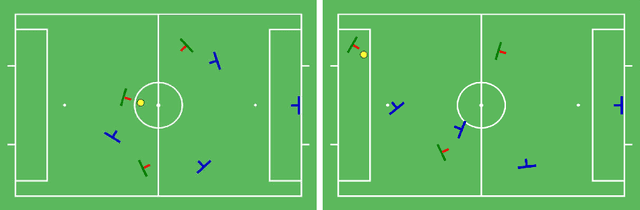
This paper considers a problem of planning an attack in robotic football (RoboCup). The problem is reduced to finding a trajectory of the ball from its current position to the opponents goals. Heuristic search algorithm, i.e. A*, is used to find such a trajectory. For this algorithm to be applicable we introduce a discretized model of the environment, i.e. a graph, as well as the core search components: cost function and heuristic function. Both are designed to take into account all the available information of the game state. We extensively evaluate the suggested approach in simulation comparing it to a range of baselines. The result of the conducted evaluation clearly shows the benefit of utilizing heuristic search within the RoboCup context.