 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAugmenting GRIPS with Heuristic Sampling for Planning Feasible Trajectories of a Car-Like Robot
Aug 15, 2021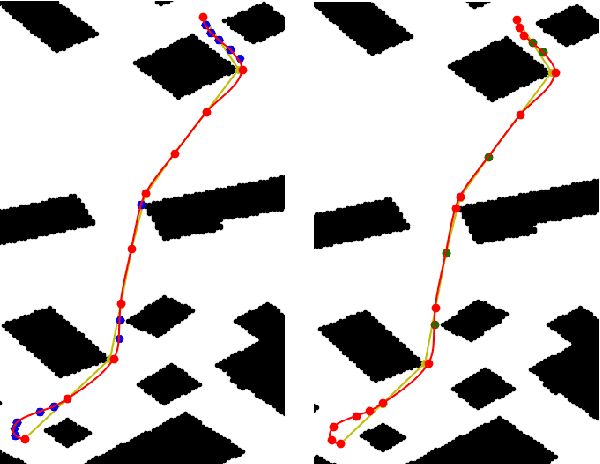
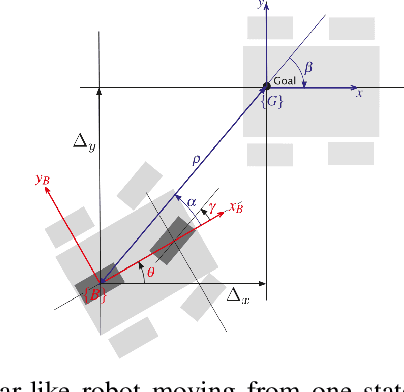
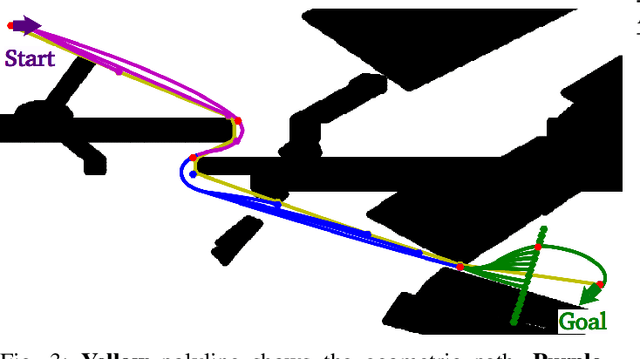
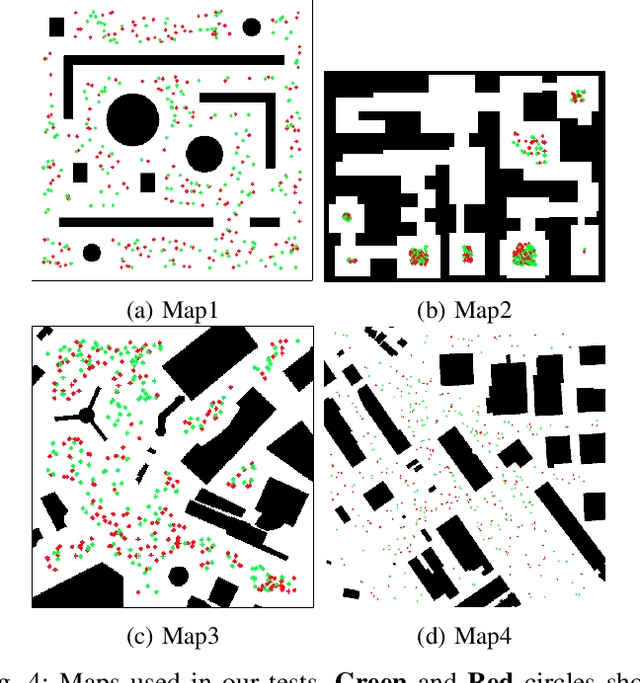
Kinodynamic motion planning for non-holomonic mobile robots is a challenging problem that is lacking a universal solution. One of the computationally efficient ways to solve it is to build a geometric path first and then transform this path into a kinematically feasible one. Gradient-informed Path Smoothing (GRIPS) is a recently introduced method for such transformation. GRIPS iteratively deforms the path and adds/deletes the waypoints while trying to connect each consecutive pair of them via the provided steering function that respects the kinematic constraints. The algorithm is relatively fast but, unfortunately, does not provide any guarantees that it will succeed. In practice, it often fails to produce feasible trajectories for car-like robots with large turning radius. In this work, we introduce a range of modifications that are aimed at increasing the success rate of GRIPS for car-like robots. The main enhancement is adding the additional step that heuristically samples waypoints along the bottleneck parts of the geometric paths (such as sharp turns). The results of the experimental evaluation provide a clear evidence that the success rate of the suggested algorithm is up to 40% higher compared to the original GRIPS and hits the bar of 90%, while its runtime is lower.