 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImitating Human Behaviour with Diffusion Models
Jan 25, 2023



Diffusion models have emerged as powerful generative models in the text-to-image domain. This paper studies their application as observation-to-action models for imitating human behaviour in sequential environments. Human behaviour is stochastic and multimodal, with structured correlations between action dimensions. Meanwhile, standard modelling choices in behaviour cloning are limited in their expressiveness and may introduce bias into the cloned policy. We begin by pointing out the limitations of these choices. We then propose that diffusion models are an excellent fit for imitating human behaviour, since they learn an expressive distribution over the joint action space. We introduce several innovations to make diffusion models suitable for sequential environments; designing suitable architectures, investigating the role of guidance, and developing reliable sampling strategies. Experimentally, diffusion models closely match human demonstrations in a simulated robotic control task and a modern 3D gaming environment.
* Published in ICLR 2023
UniMASK: Unified Inference in Sequential Decision Problems
Nov 20, 2022



Randomly masking and predicting word tokens has been a successful approach in pre-training language models for a variety of downstream tasks. In this work, we observe that the same idea also applies naturally to sequential decision-making, where many well-studied tasks like behavior cloning, offline reinforcement learning, inverse dynamics, and waypoint conditioning correspond to different sequence maskings over a sequence of states, actions, and returns. We introduce the UniMASK framework, which provides a unified way to specify models which can be trained on many different sequential decision-making tasks. We show that a single UniMASK model is often capable of carrying out many tasks with performance similar to or better than single-task models. Additionally, after fine-tuning, our UniMASK models consistently outperform comparable single-task models. Our code is publicly available at https://github.com/micahcarroll/uniMASK.
Contextual Squeeze-and-Excitation for Efficient Few-Shot Image Classification
Jun 20, 2022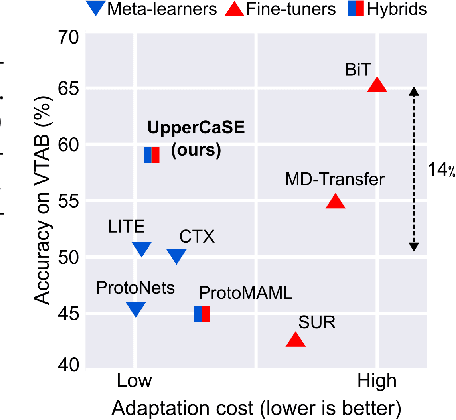
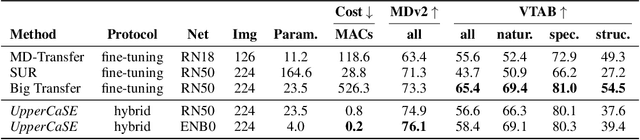
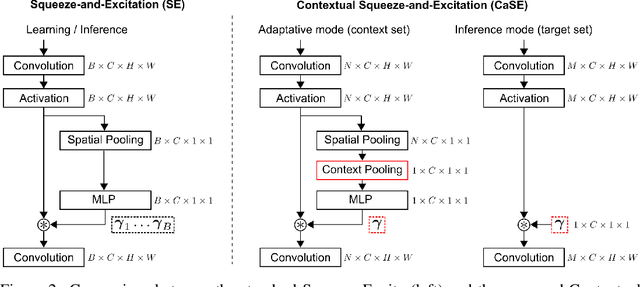
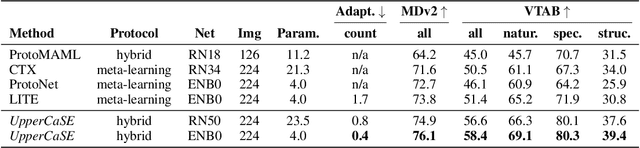
Recent years have seen a growth in user-centric applications that require effective knowledge transfer across tasks in the low-data regime. An example is personalization, where a pretrained system is adapted by learning on small amounts of labeled data belonging to a specific user. This setting requires high accuracy under low computational complexity, therefore the Pareto frontier of accuracy vs.~adaptation cost plays a crucial role. In this paper we push this Pareto frontier in the few-shot image classification setting with two key contributions: (i) a new adaptive block called Contextual Squeeze-and-Excitation (CaSE) that adjusts a pretrained neural network on a new task to significantly improve performance with a single forward pass of the user data (context), and (ii) a hybrid training protocol based on Coordinate-Descent called UpperCaSE that exploits meta-trained CaSE blocks and fine-tuning routines for efficient adaptation. UpperCaSE achieves a new state-of-the-art accuracy relative to meta-learners on the 26 datasets of VTAB+MD and on a challenging real-world personalization benchmark (ORBIT), narrowing the gap with leading fine-tuning methods with the benefit of orders of magnitude lower adaptation cost.
Interactively Learning Preference Constraints in Linear Bandits
Jun 10, 2022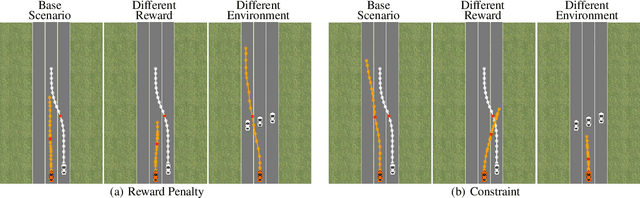
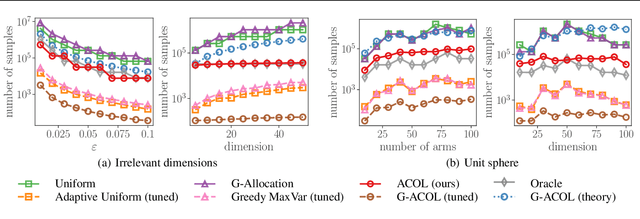

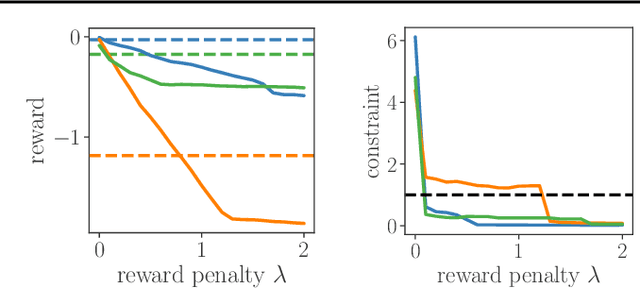
We study sequential decision-making with known rewards and unknown constraints, motivated by situations where the constraints represent expensive-to-evaluate human preferences, such as safe and comfortable driving behavior. We formalize the challenge of interactively learning about these constraints as a novel linear bandit problem which we call constrained linear best-arm identification. To solve this problem, we propose the Adaptive Constraint Learning (ACOL) algorithm. We provide an instance-dependent lower bound for constrained linear best-arm identification and show that ACOL's sample complexity matches the lower bound in the worst-case. In the average case, ACOL's sample complexity bound is still significantly tighter than bounds of simpler approaches. In synthetic experiments, ACOL performs on par with an oracle solution and outperforms a range of baselines. As an application, we consider learning constraints to represent human preferences in a driving simulation. ACOL is significantly more sample efficient than alternatives for this application. Further, we find that learning preferences as constraints is more robust to changes in the driving scenario than encoding the preferences directly in the reward function.
Towards Flexible Inference in Sequential Decision Problems via Bidirectional Transformers
Apr 28, 2022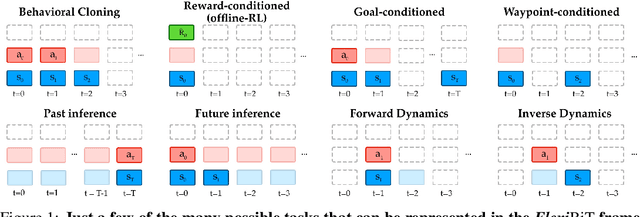
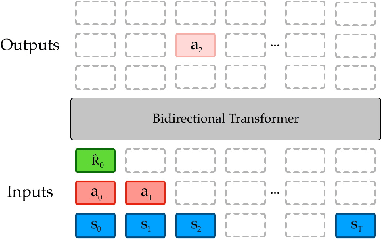
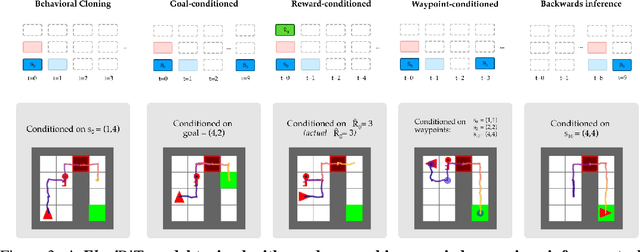
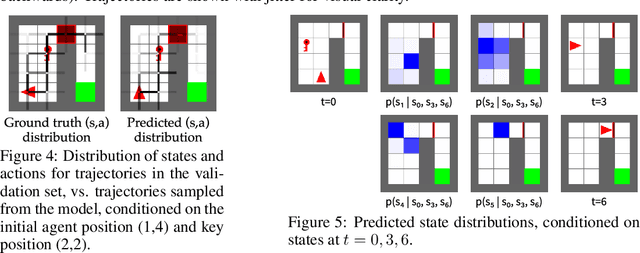
Randomly masking and predicting word tokens has been a successful approach in pre-training language models for a variety of downstream tasks. In this work, we observe that the same idea also applies naturally to sequential decision making, where many well-studied tasks like behavior cloning, offline RL, inverse dynamics, and waypoint conditioning correspond to different sequence maskings over a sequence of states, actions, and returns. We introduce the FlexiBiT framework, which provides a unified way to specify models which can be trained on many different sequential decision making tasks. We show that a single FlexiBiT model is simultaneously capable of carrying out many tasks with performance similar to or better than specialized models. Additionally, we show that performance can be further improved by fine-tuning our general model on specific tasks of interest.
Monotonic Improvement Guarantees under Non-stationarity for Decentralized PPO
Jan 31, 2022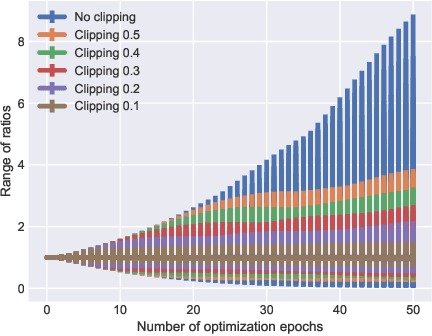
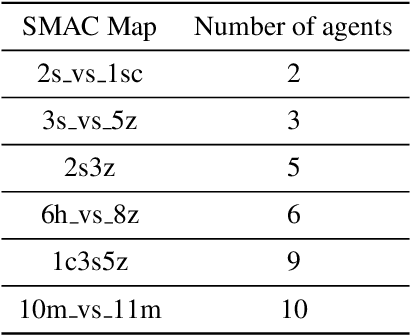
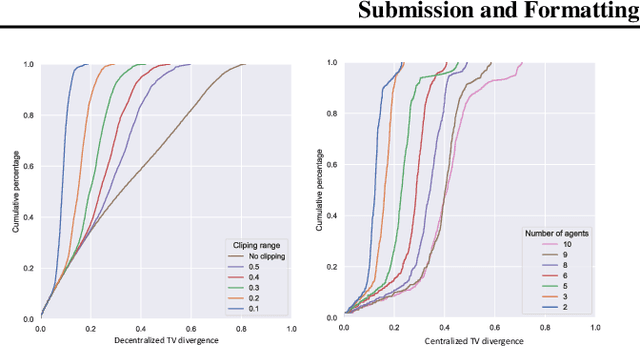
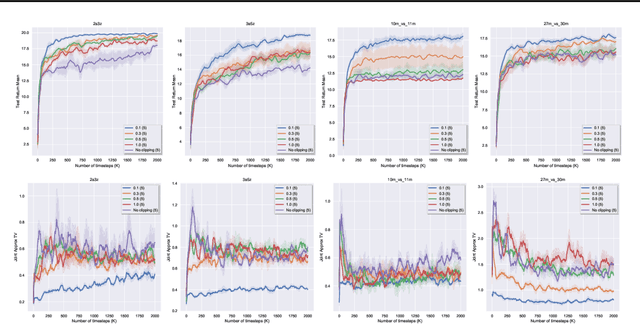
We present a new monotonic improvement guarantee for optimizing decentralized policies in cooperative Multi-Agent Reinforcement Learning (MARL), which holds even when the transition dynamics are non-stationary. This new analysis provides a theoretical understanding of the strong performance of two recent actor-critic methods for MARL, i.e., Independent Proximal Policy Optimization (IPPO) and Multi-Agent PPO (MAPPO), which both rely on independent ratios, i.e., computing probability ratios separately for each agent's policy. We show that, despite the non-stationarity that independent ratios cause, a monotonic improvement guarantee still arises as a result of enforcing the trust region constraint over all decentralized policies. We also show this trust region constraint can be effectively enforced in a principled way by bounding independent ratios based on the number of agents in training, providing a theoretical foundation for proximal ratio clipping. Moreover, we show that the surrogate objectives optimized in IPPO and MAPPO are essentially equivalent when their critics converge to a fixed point. Finally, our empirical results support the hypothesis that the strong performance of IPPO and MAPPO is a direct result of enforcing such a trust region constraint via clipping in centralized training, and the good values of the hyperparameters for this enforcement are highly sensitive to the number of agents, as predicted by our theoretical analysis.
You May Not Need Ratio Clipping in PPO
Jan 31, 2022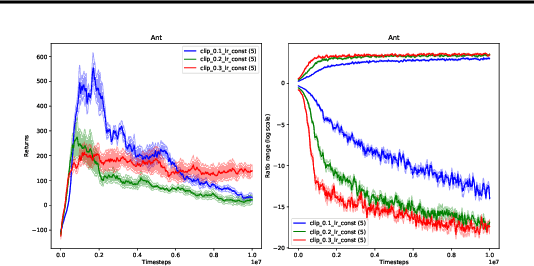
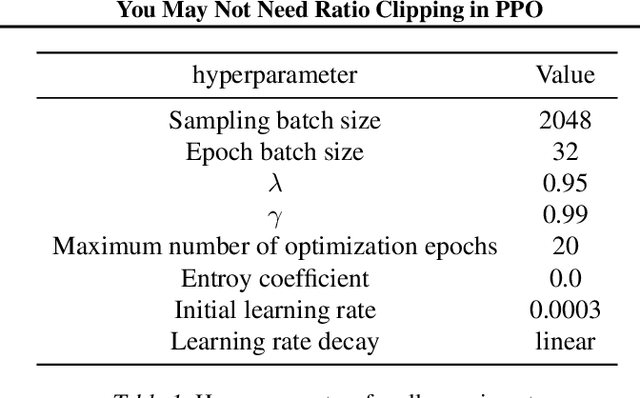
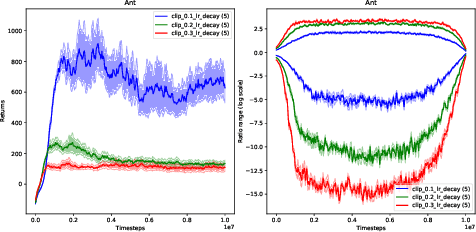
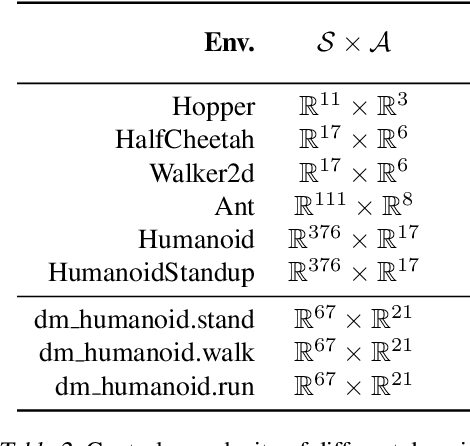
Proximal Policy Optimization (PPO) methods learn a policy by iteratively performing multiple mini-batch optimization epochs of a surrogate objective with one set of sampled data. Ratio clipping PPO is a popular variant that clips the probability ratios between the target policy and the policy used to collect samples. Ratio clipping yields a pessimistic estimate of the original surrogate objective, and has been shown to be crucial for strong performance. We show in this paper that such ratio clipping may not be a good option as it can fail to effectively bound the ratios. Instead, one can directly optimize the original surrogate objective for multiple epochs; the key is to find a proper condition to early stop the optimization epoch in each iteration. Our theoretical analysis sheds light on how to determine when to stop the optimization epoch, and call the resulting algorithm Early Stopping Policy Optimization (ESPO). We compare ESPO with PPO across many continuous control tasks and show that ESPO significantly outperforms PPO. Furthermore, we show that ESPO can be easily scaled up to distributed training with many workers, delivering strong performance as well.
Deterministic and Discriminative Imitation (D2-Imitation): Revisiting Adversarial Imitation for Sample Efficiency
Dec 11, 2021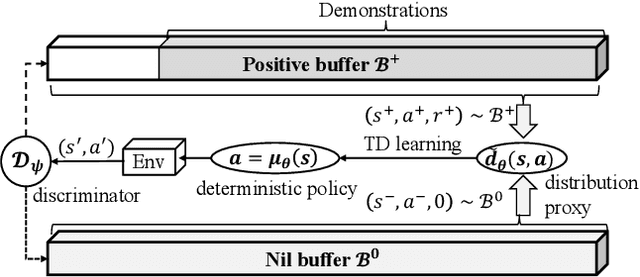
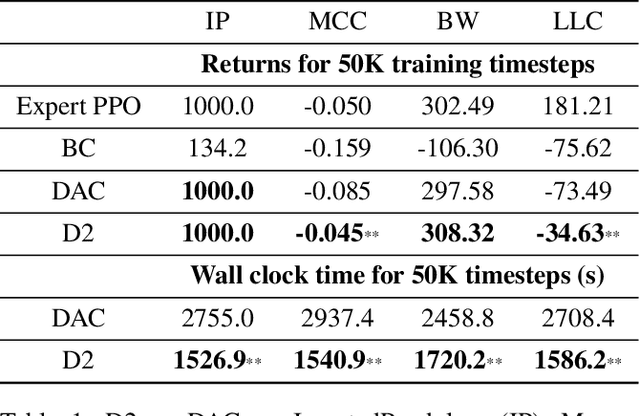
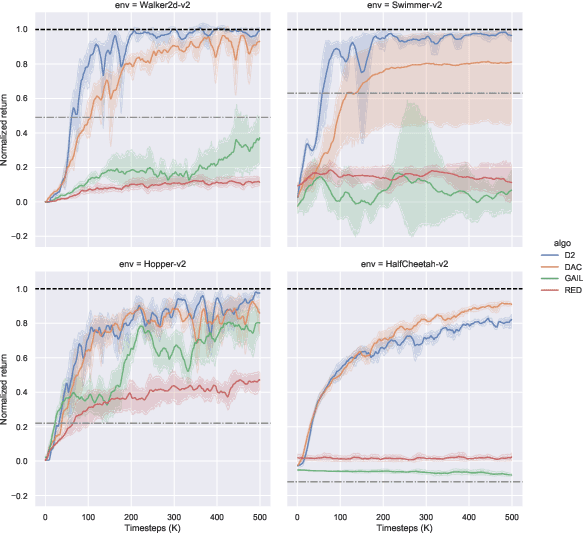
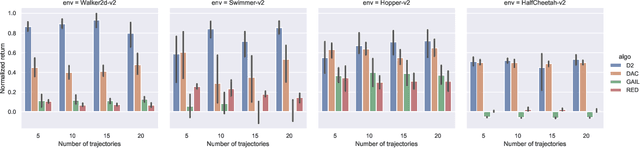
Sample efficiency is crucial for imitation learning methods to be applicable in real-world applications. Many studies improve sample efficiency by extending adversarial imitation to be off-policy regardless of the fact that these off-policy extensions could either change the original objective or involve complicated optimization. We revisit the foundation of adversarial imitation and propose an off-policy sample efficient approach that requires no adversarial training or min-max optimization. Our formulation capitalizes on two key insights: (1) the similarity between the Bellman equation and the stationary state-action distribution equation allows us to derive a novel temporal difference (TD) learning approach; and (2) the use of a deterministic policy simplifies the TD learning. Combined, these insights yield a practical algorithm, Deterministic and Discriminative Imitation (D2-Imitation), which operates by first partitioning samples into two replay buffers and then learning a deterministic policy via off-policy reinforcement learning. Our empirical results show that D2-Imitation is effective in achieving good sample efficiency, outperforming several off-policy extension approaches of adversarial imitation on many control tasks.
NeurIPS 2021 Competition IGLU: Interactive Grounded Language Understanding in a Collaborative Environment
Oct 15, 2021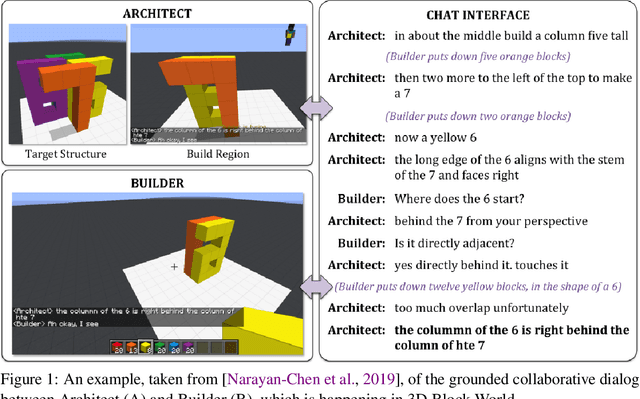

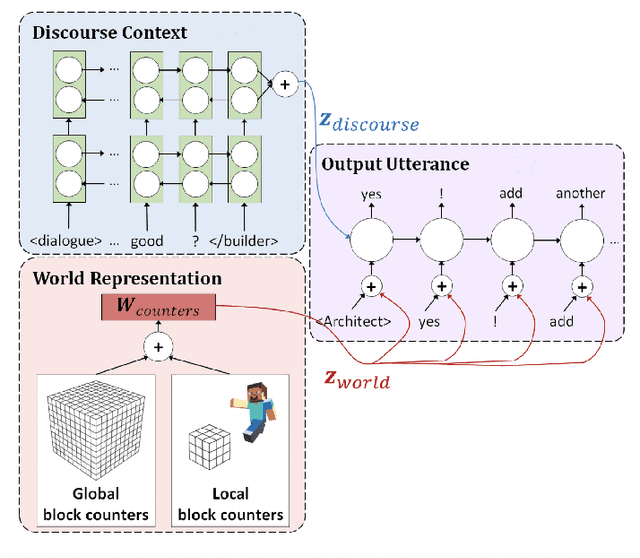
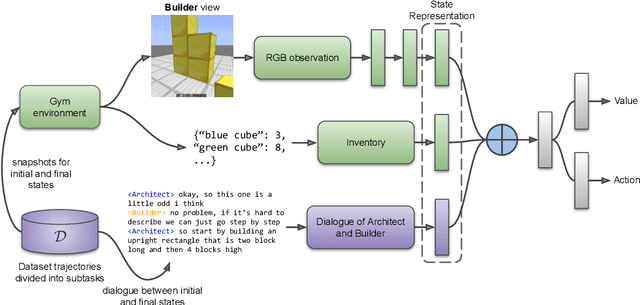
Human intelligence has the remarkable ability to adapt to new tasks and environments quickly. Starting from a very young age, humans acquire new skills and learn how to solve new tasks either by imitating the behavior of others or by following provided natural language instructions. To facilitate research in this direction, we propose IGLU: Interactive Grounded Language Understanding in a Collaborative Environment. The primary goal of the competition is to approach the problem of how to build interactive agents that learn to solve a task while provided with grounded natural language instructions in a collaborative environment. Understanding the complexity of the challenge, we split it into sub-tasks to make it feasible for participants. This research challenge is naturally related, but not limited, to two fields of study that are highly relevant to the NeurIPS community: Natural Language Understanding and Generation (NLU/G) and Reinforcement Learning (RL). Therefore, the suggested challenge can bring two communities together to approach one of the important challenges in AI. Another important aspect of the challenge is the dedication to perform a human-in-the-loop evaluation as a final evaluation for the agents developed by contestants.
Strategically Efficient Exploration in Competitive Multi-agent Reinforcement Learning
Jul 30, 2021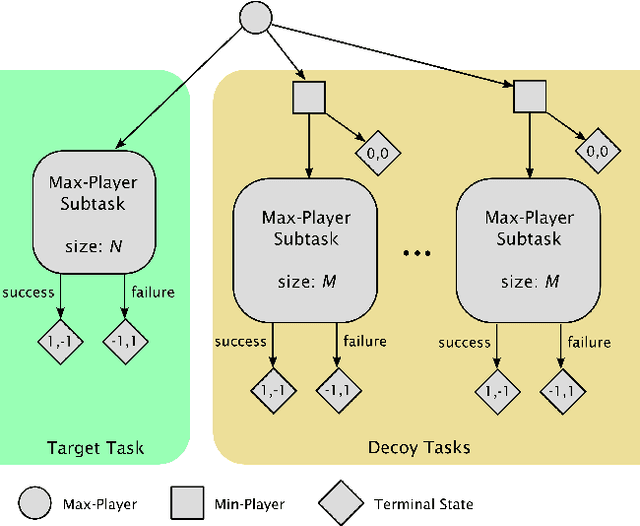
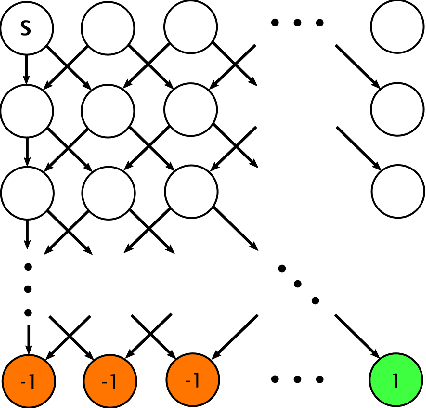
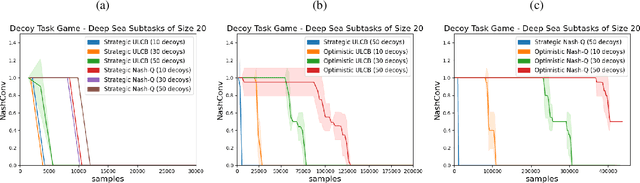
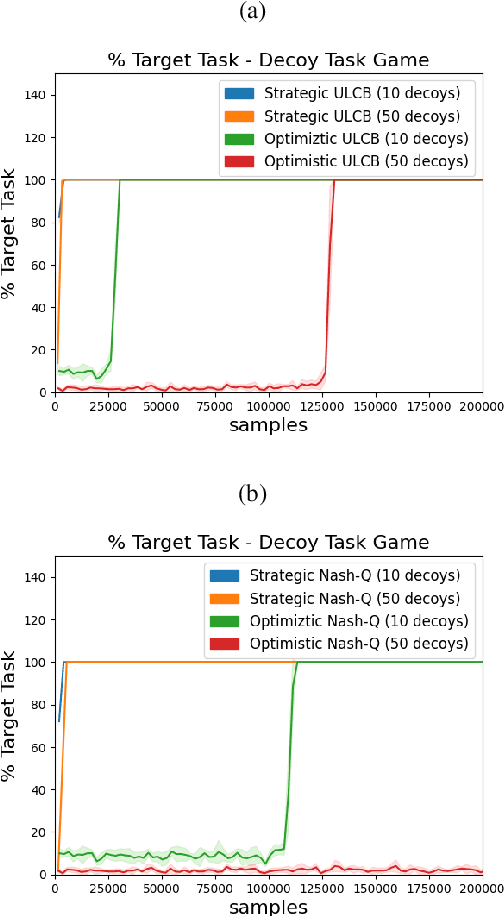
High sample complexity remains a barrier to the application of reinforcement learning (RL), particularly in multi-agent systems. A large body of work has demonstrated that exploration mechanisms based on the principle of optimism under uncertainty can significantly improve the sample efficiency of RL in single agent tasks. This work seeks to understand the role of optimistic exploration in non-cooperative multi-agent settings. We will show that, in zero-sum games, optimistic exploration can cause the learner to waste time sampling parts of the state space that are irrelevant to strategic play, as they can only be reached through cooperation between both players. To address this issue, we introduce a formal notion of strategically efficient exploration in Markov games, and use this to develop two strategically efficient learning algorithms for finite Markov games. We demonstrate that these methods can be significantly more sample efficient than their optimistic counterparts.