 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom OFDM to AFDM: Enabling Adaptive Integrated Sensing and Communication in High-Mobility Scenarios
Oct 31, 2025Integrated sensing and communication (ISAC) is a key feature of next-generation wireless networks, enabling a wide range of emerging applications such as vehicle-to-everything (V2X) and unmanned aerial vehicles (UAVs), which operate in high-mobility scenarios. Notably, the wireless channels within these applications typically exhibit severe delay and Doppler spreads. The latter causes serious communication performance degradation in the Orthogonal Frequency-Division Multiplexing (OFDM) waveform that is widely adopted in current wireless networks. To address this challenge, the recently proposed Doppler-resilient affine frequency division multiplexing (AFDM) waveform, which uses flexible chirp signals as subcarriers, shows great potential for achieving adaptive ISAC in high-mobility scenarios. This article provides a comprehensive overview of AFDM-ISAC. We begin by presenting the fundamentals of AFDM-ISAC, highlighting its inherent frequency-modulated continuous-wave (FMCW)-like characteristics. Then, we explore its ISAC performance limits by analyzing its diversity order, ambiguity function (AF), and Cramer-Rao Bound (CRB). Finally, we present several effective sensing algorithms and opportunities for AFDM-ISAC, with the aim of sparking new ideas in this emerging field.
RealMirror: A Comprehensive, Open-Source Vision-Language-Action Platform for Embodied AI
Sep 18, 2025



The emerging field of Vision-Language-Action (VLA) for humanoid robots faces several fundamental challenges, including the high cost of data acquisition, the lack of a standardized benchmark, and the significant gap between simulation and the real world. To overcome these obstacles, we propose RealMirror, a comprehensive, open-source embodied AI VLA platform. RealMirror builds an efficient, low-cost data collection, model training, and inference system that enables end-to-end VLA research without requiring a real robot. To facilitate model evolution and fair comparison, we also introduce a dedicated VLA benchmark for humanoid robots, featuring multiple scenarios, extensive trajectories, and various VLA models. Furthermore, by integrating generative models and 3D Gaussian Splatting to reconstruct realistic environments and robot models, we successfully demonstrate zero-shot Sim2Real transfer, where models trained exclusively on simulation data can perform tasks on a real robot seamlessly, without any fine-tuning. In conclusion, with the unification of these critical components, RealMirror provides a robust framework that significantly accelerates the development of VLA models for humanoid robots. Project page: https://terminators2025.github.io/RealMirror.github.io
Ghost Panorama
Aug 13, 2021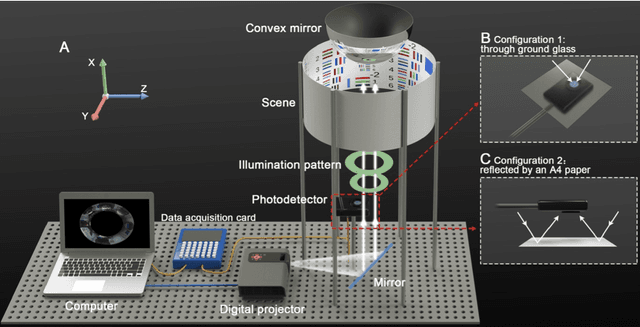
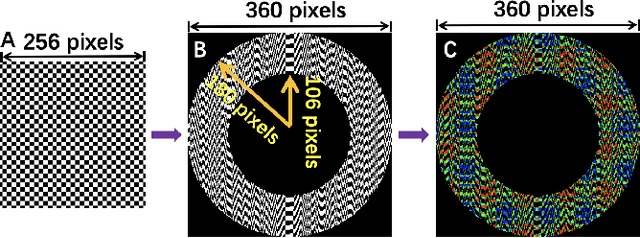
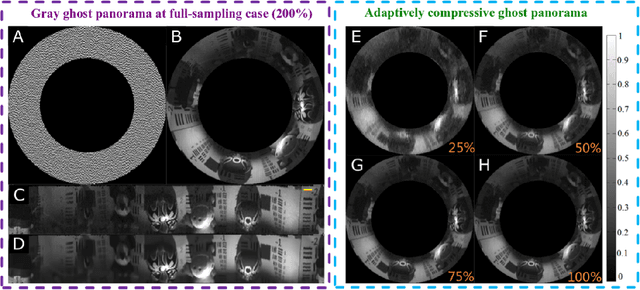

Computational ghost imaging or single-pixel imaging enables the image formation of an unknown scene using a lens-free photodetector. In this Letter, we present a computational panoramic ghost imaging system that can achieve the full-color panorama using a single-pixel photodetector, where a convex mirror performs the optical transformation of the engineered Hadamard-based circular illumination pattern from unidirectionally to omnidirectionally. To our best knowledge, it is the first time to propose the concept of ghost panorama and realize preliminary experimentations. It is foreseeable that ghost panorama will have more advantages in imaging and detection in many extreme conditions (e.g., scattering/turbulence, cryogenic temperatures, and unconventional spectra), as well as broad application prospects in the positioning of fast-moving targets and situation awareness for autonomous vehicles.
Scalable Power Control/Beamforming in Heterogeneous Wireless Networks with Graph Neural Networks
Apr 12, 2021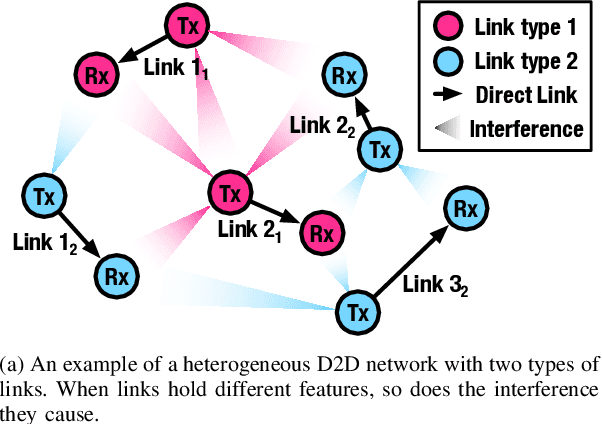
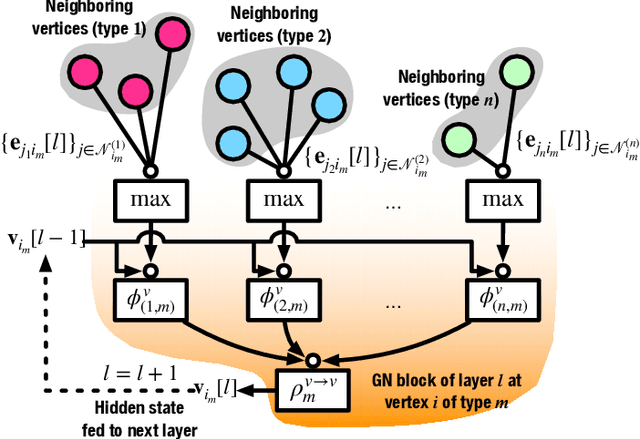
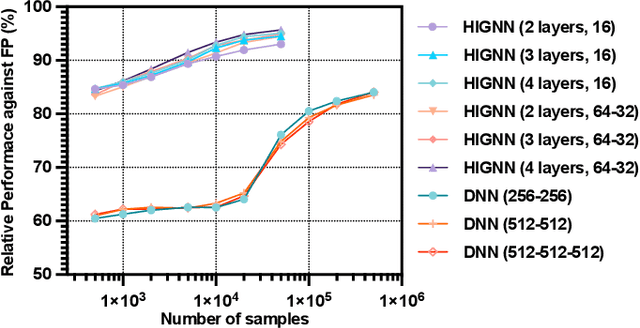
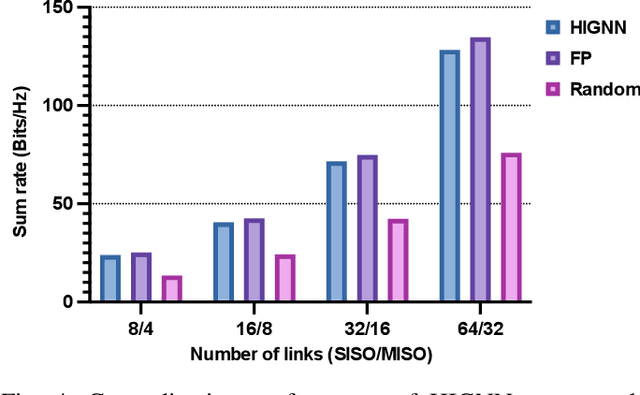
Machine learning (ML) has been widely used for efficient resource allocation (RA) in wireless networks. Although superb performance is achieved on small and simple networks, most existing ML-based approaches are confronted with difficulties when heterogeneity occurs and network size expands. In this paper, specifically focusing on power control/beamforming (PC/BF) in heterogeneous device-to-device (D2D) networks, we propose a novel unsupervised learning-based framework named heterogeneous interference graph neural network (HIGNN) to handle these challenges. First, we characterize diversified link features and interference relations with heterogeneous graphs. Then, HIGNN is proposed to empower each link to obtain its individual transmission scheme after limited information exchange with neighboring links. It is noteworthy that HIGNN is scalable to wireless networks of growing sizes with robust performance after trained on small-sized networks. Numerical results show that compared with state-of-the-art benchmarks, HIGNN achieves much higher execution efficiency while providing strong performance.