 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeText-Conditional JEPA for Learning Semantically Rich Visual Representations
May 05, 2026Image-based Joint-Embedding Predictive Architecture (I-JEPA) offers a promising approach to visual self-supervised learning through masked feature prediction. However with the inherent visual uncertainty at masked positions, feature prediction remains challenging and may fail to learn semantic representations. In this work, we propose Text-Conditional JEPA (TC-JEPA) that uses image captions to reduce the prediction uncertainty. Specifically, we modulate the predicted patch features using a fine-grained text conditioner that computes sparse cross-attention over input text tokens. With such conditioning, patch features become predictable as a function of text, thus are more semantically meaningful. We show TC-JEPA improves downstream performance and training stability, with promising scaling properties. TC-JEPA also offers a new vision-language pretraining paradigm based on feature prediction only, outperforming contrastive methods on diverse tasks, especially those requiring fine-grained visual understanding and reasoning.
Learning Long-term Motion Embeddings for Efficient Kinematics Generation
Apr 13, 2026Understanding and predicting motion is a fundamental component of visual intelligence. Although modern video models exhibit strong comprehension of scene dynamics, exploring multiple possible futures through full video synthesis remains prohibitively inefficient. We model scene dynamics orders of magnitude more efficiently by directly operating on a long-term motion embedding that is learned from large-scale trajectories obtained from tracker models. This enables efficient generation of long, realistic motions that fulfill goals specified via text prompts or spatial pokes. To achieve this, we first learn a highly compressed motion embedding with a temporal compression factor of 64x. In this space, we train a conditional flow-matching model to generate motion latents conditioned on task descriptions. The resulting motion distributions outperform those of both state-of-the-art video models and specialized task-specific approaches.
The Coupling Within: Flow Matching via Distilled Normalizing Flows
Mar 09, 2026Flow models have rapidly become the go-to method for training and deploying large-scale generators, owing their success to inference-time flexibility via adjustable integration steps. A crucial ingredient in flow training is the choice of coupling measure for sampling noise/data pairs that define the flow matching (FM) regression loss. While FM training defaults usually to independent coupling, recent works show that adaptive couplings informed by noise/data distributions (e.g., via optimal transport, OT) improve both model training and inference. We radicalize this insight by shifting the paradigm: rather than computing adaptive couplings directly, we use distilled couplings from a different, pretrained model capable of placing noise and data spaces in bijection -- a property intrinsic to normalizing flows (NF) through their maximum likelihood and invertibility requirements. Leveraging recent advances in NF image generation via auto-regressive (AR) blocks, we propose Normalized Flow Matching (NFM), a new method that distills the quasi-deterministic coupling of pretrained NF models to train student flow models. These students achieve the best of both worlds: significantly outperforming flow models trained with independent or even OT couplings, while also improving on the teacher AR-NF model.
The Design Space of Tri-Modal Masked Diffusion Models
Feb 25, 2026Discrete diffusion models have emerged as strong alternatives to autoregressive language models, with recent work initializing and fine-tuning a base unimodal model for bimodal generation. Diverging from previous approaches, we introduce the first tri-modal masked diffusion model pretrained from scratch on text, image-text, and audio-text data. We systematically analyze multimodal scaling laws, modality mixing ratios, noise schedules, and batch-size effects, and we provide optimized inference sampling defaults. Our batch-size analysis yields a novel stochastic differential equation (SDE)-based reparameterization that eliminates the need for tuning the optimal batch size as reported in recent work. This reparameterization decouples the physical batch size, often chosen based on compute constraints (GPU saturation, FLOP efficiency, wall-clock time), from the logical batch size, chosen to balance gradient variance during stochastic optimization. Finally, we pretrain a preliminary 3B-parameter tri-modal model on 6.4T tokens, demonstrating the capabilities of a unified design and achieving strong results in text generation, text-to-image tasks, and text-to-speech tasks. Our work represents the largest-scale systematic open study of multimodal discrete diffusion models conducted to date, providing insights into scaling behaviors across multiple modalities.
STARFlow: Scaling Latent Normalizing Flows for High-resolution Image Synthesis
Jun 06, 2025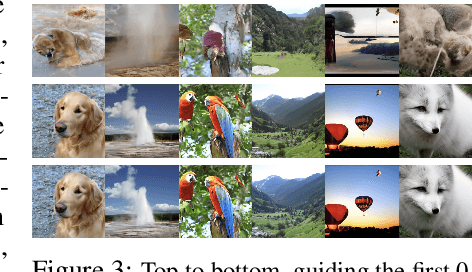
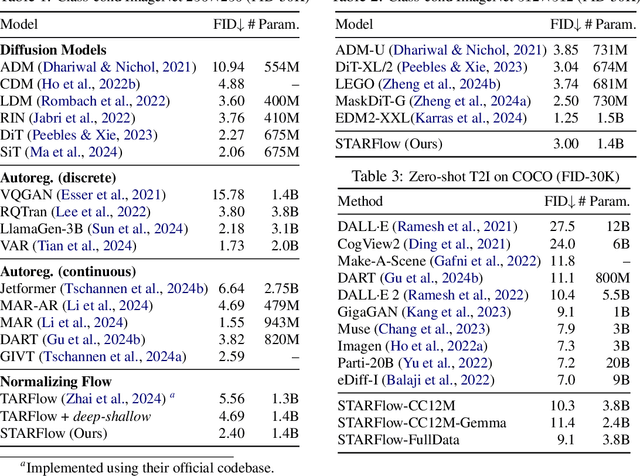
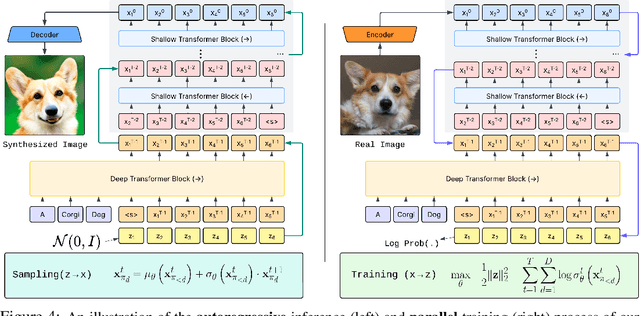
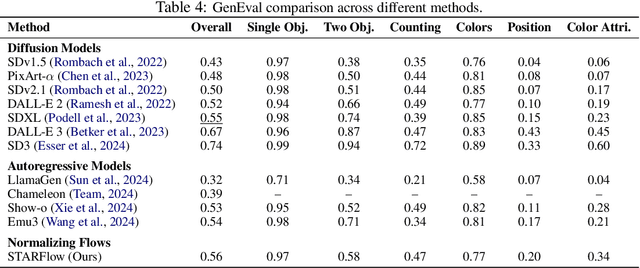
We present STARFlow, a scalable generative model based on normalizing flows that achieves strong performance in high-resolution image synthesis. The core of STARFlow is Transformer Autoregressive Flow (TARFlow), which combines the expressive power of normalizing flows with the structured modeling capabilities of Autoregressive Transformers. We first establish the theoretical universality of TARFlow for modeling continuous distributions. Building on this foundation, we introduce several key architectural and algorithmic innovations to significantly enhance scalability: (1) a deep-shallow design, wherein a deep Transformer block captures most of the model representational capacity, complemented by a few shallow Transformer blocks that are computationally efficient yet substantially beneficial; (2) modeling in the latent space of pretrained autoencoders, which proves more effective than direct pixel-level modeling; and (3) a novel guidance algorithm that significantly boosts sample quality. Crucially, our model remains an end-to-end normalizing flow, enabling exact maximum likelihood training in continuous spaces without discretization. STARFlow achieves competitive performance in both class-conditional and text-conditional image generation tasks, approaching state-of-the-art diffusion models in sample quality. To our knowledge, this work is the first successful demonstration of normalizing flows operating effectively at this scale and resolution.
Proxy-FDA: Proxy-based Feature Distribution Alignment for Fine-tuning Vision Foundation Models without Forgetting
May 30, 2025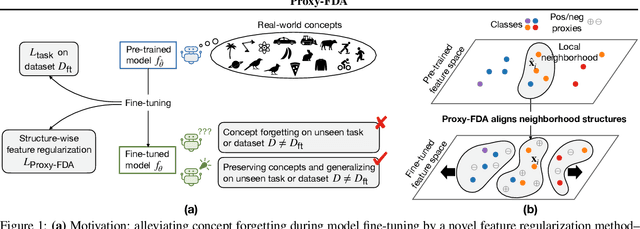
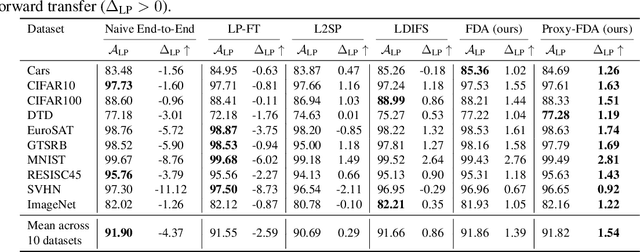
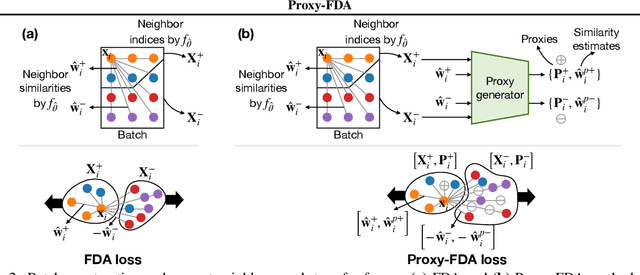
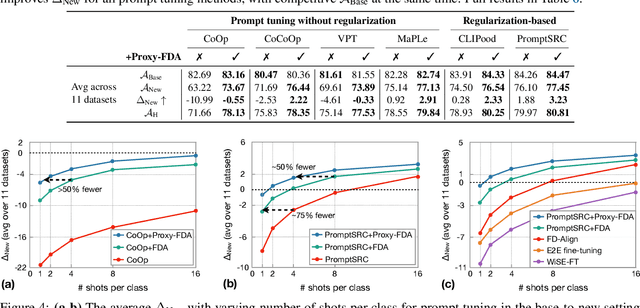
Vision foundation models pre-trained on massive data encode rich representations of real-world concepts, which can be adapted to downstream tasks by fine-tuning. However, fine-tuning foundation models on one task often leads to the issue of concept forgetting on other tasks. Recent methods of robust fine-tuning aim to mitigate forgetting of prior knowledge without affecting the fine-tuning performance. Knowledge is often preserved by matching the original and fine-tuned model weights or feature pairs. However, such point-wise matching can be too strong, without explicit awareness of the feature neighborhood structures that encode rich knowledge as well. We propose a novel regularization method Proxy-FDA that explicitly preserves the structural knowledge in feature space. Proxy-FDA performs Feature Distribution Alignment (using nearest neighbor graphs) between the pre-trained and fine-tuned feature spaces, and the alignment is further improved by informative proxies that are generated dynamically to increase data diversity. Experiments show that Proxy-FDA significantly reduces concept forgetting during fine-tuning, and we find a strong correlation between forgetting and a distributional distance metric (in comparison to L2 distance). We further demonstrate Proxy-FDA's benefits in various fine-tuning settings (end-to-end, few-shot and continual tuning) and across different tasks like image classification, captioning and VQA.
Parameters vs FLOPs: Scaling Laws for Optimal Sparsity for Mixture-of-Experts Language Models
Jan 21, 2025Scaling the capacity of language models has consistently proven to be a reliable approach for improving performance and unlocking new capabilities. Capacity can be primarily defined by two dimensions: the number of model parameters and the compute per example. While scaling typically involves increasing both, the precise interplay between these factors and their combined contribution to overall capacity remains not fully understood. We explore this relationship in the context of sparse Mixture-of-Expert models (MoEs), which allow scaling the number of parameters without proportionally increasing the FLOPs per example. We investigate how varying the sparsity level, i.e., the ratio of non-active to total parameters, affects model performance in terms of both pretraining and downstream performance. We find that under different constraints (e.g. parameter size and total training compute), there is an optimal level of sparsity that improves both training efficiency and model performance. These results provide a better understanding of the impact of sparsity in scaling laws for MoEs and complement existing works in this area, offering insights for designing more efficient architectures.
3D Shape Tokenization
Dec 24, 2024



We introduce Shape Tokens, a 3D representation that is continuous, compact, and easy to incorporate into machine learning models. Shape Tokens act as conditioning vectors that represent shape information in a 3D flow-matching model. The flow-matching model is trained to approximate probability density functions corresponding to delta functions concentrated on the surfaces of shapes in 3D. By attaching Shape Tokens to various machine learning models, we can generate new shapes, convert images to 3D, align 3D shapes with text and images, and render shapes directly at variable, user specified, resolution. Moreover, Shape Tokens enable a systematic analysis of geometric properties such as normal, density, and deformation field. Across all tasks and experiments, utilizing Shape Tokens demonstrate strong performance compared to existing baselines.
Normalizing Flows are Capable Generative Models
Dec 10, 2024Normalizing Flows (NFs) are likelihood-based models for continuous inputs. They have demonstrated promising results on both density estimation and generative modeling tasks, but have received relatively little attention in recent years. In this work, we demonstrate that NFs are more powerful than previously believed. We present TarFlow: a simple and scalable architecture that enables highly performant NF models. TarFlow can be thought of as a Transformer-based variant of Masked Autoregressive Flows (MAFs): it consists of a stack of autoregressive Transformer blocks on image patches, alternating the autoregression direction between layers. TarFlow is straightforward to train end-to-end, and capable of directly modeling and generating pixels. We also propose three key techniques to improve sample quality: Gaussian noise augmentation during training, a post training denoising procedure, and an effective guidance method for both class-conditional and unconditional settings. Putting these together, TarFlow sets new state-of-the-art results on likelihood estimation for images, beating the previous best methods by a large margin, and generates samples with quality and diversity comparable to diffusion models, for the first time with a stand-alone NF model. We make our code available at https://github.com/apple/ml-tarflow.
Coordinate In and Value Out: Training Flow Transformers in Ambient Space
Dec 05, 2024



Flow matching models have emerged as a powerful method for generative modeling on domains like images or videos, and even on unstructured data like 3D point clouds. These models are commonly trained in two stages: first, a data compressor (i.e., a variational auto-encoder) is trained, and in a subsequent training stage a flow matching generative model is trained in the low-dimensional latent space of the data compressor. This two stage paradigm adds complexity to the overall training recipe and sets obstacles for unifying models across data domains, as specific data compressors are used for different data modalities. To this end, we introduce Ambient Space Flow Transformers (ASFT), a domain-agnostic approach to learn flow matching transformers in ambient space, sidestepping the requirement of training compressors and simplifying the training process. We introduce a conditionally independent point-wise training objective that enables ASFT to make predictions continuously in coordinate space. Our empirical results demonstrate that using general purpose transformer blocks, ASFT effectively handles different data modalities such as images and 3D point clouds, achieving strong performance in both domains and outperforming comparable approaches. ASFT is a promising step towards domain-agnostic flow matching generative models that can be trivially adopted in different data domains.