 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModular Memory is the Key to Continual Learning Agents
Mar 02, 2026Foundation models have transformed machine learning through large-scale pretraining and increased test-time compute. Despite surpassing human performance in several domains, these models remain fundamentally limited in continuous operation, experience accumulation, and personalization, capabilities that are central to adaptive intelligence. While continual learning research has long targeted these goals, its historical focus on in-weight learning (IWL), i.e., updating a single model's parameters to absorb new knowledge, has rendered catastrophic forgetting a persistent challenge. Our position is that combining the strengths of In-Weight Learning (IWL) and the newly emerged capabilities of In-Context Learning (ICL) through the design of modular memory is the missing piece for continual adaptation at scale. We outline a conceptual framework for modular memory-centric architectures that leverage ICL for rapid adaptation and knowledge accumulation, and IWL for stable updates to model capabilities, charting a practical roadmap toward continually learning agents.
Iterative Compositional Data Generation for Robot Control
Dec 20, 2025



Collecting robotic manipulation data is expensive, making it impractical to acquire demonstrations for the combinatorially large space of tasks that arise in multi-object, multi-robot, and multi-environment settings. While recent generative models can synthesize useful data for individual tasks, they do not exploit the compositional structure of robotic domains and struggle to generalize to unseen task combinations. We propose a semantic compositional diffusion transformer that factorizes transitions into robot-, object-, obstacle-, and objective-specific components and learns their interactions through attention. Once trained on a limited subset of tasks, we show that our model can zero-shot generate high-quality transitions from which we can learn control policies for unseen task combinations. Then, we introduce an iterative self-improvement procedure in which synthetic data is validated via offline reinforcement learning and incorporated into subsequent training rounds. Our approach substantially improves zero-shot performance over monolithic and hard-coded compositional baselines, ultimately solving nearly all held-out tasks and demonstrating the emergence of meaningful compositional structure in the learned representations.
Continual Improvement of Threshold-Based Novelty Detection
Sep 05, 2023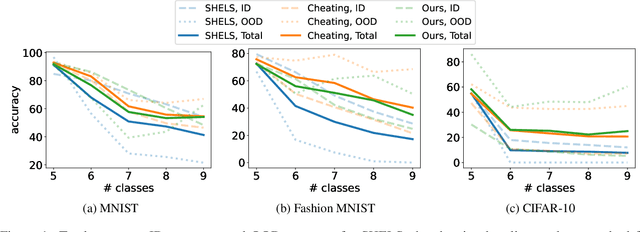
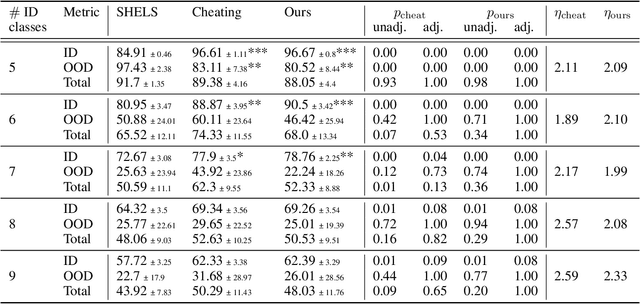
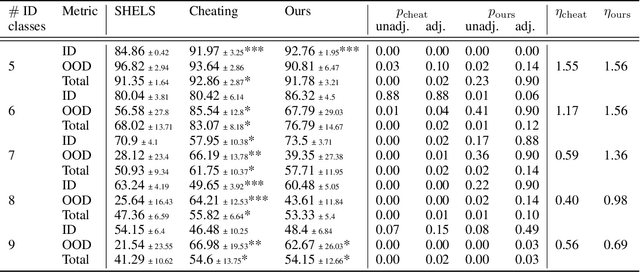
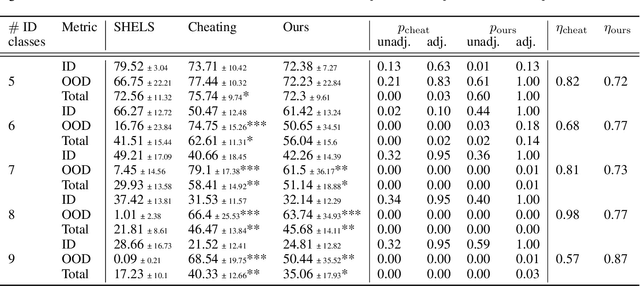
When evaluated in dynamic, open-world situations, neural networks struggle to detect unseen classes. This issue complicates the deployment of continual learners in realistic environments where agents are not explicitly informed when novel categories are encountered. A common family of techniques for detecting novelty relies on thresholds of similarity between observed data points and the data used for training. However, these methods often require manually specifying (ahead of time) the value of these thresholds, and are therefore incapable of adapting to the nature of the data. We propose a new method for automatically selecting these thresholds utilizing a linear search and leave-one-out cross-validation on the ID classes. We demonstrate that this novel method for selecting thresholds results in improved total accuracy on MNIST, Fashion MNIST, and CIFAR-10.