 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeE-MPC: Edge-assisted Model Predictive Control
Oct 01, 2024



Model predictive control (MPC) has become the de facto standard action space for local planning and learning-based control in many continuous robotic control tasks, including autonomous driving. MPC solves a long-horizon cost optimization as a series of short-horizon optimizations based on a global planner-supplied reference path. The primary challenge in MPC, however, is that the computational budget for re-planning has a hard limit, which frequently inhibits exact optimization. Modern edge networks provide low-latency communication and heterogeneous properties that can be especially beneficial in this situation. We propose a novel framework for edge-assisted MPC (E-MPC) for path planning that exploits the heterogeneity of edge networks in three important ways: 1) varying computational capacity, 2) localized sensor information, and 3) localized observation histories. Theoretical analysis and extensive simulations are undertaken to demonstrate quantitatively the benefits of E-MPC in various scenarios, including maps, channel dynamics, and availability and density of edge nodes. The results confirm that E-MPC has the potential to reduce costs by a greater percentage than standard MPC does.
Feedback in Imitation Learning: The Three Regimes of Covariate Shift
Feb 11, 2021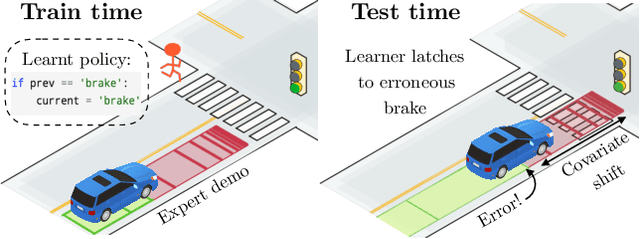
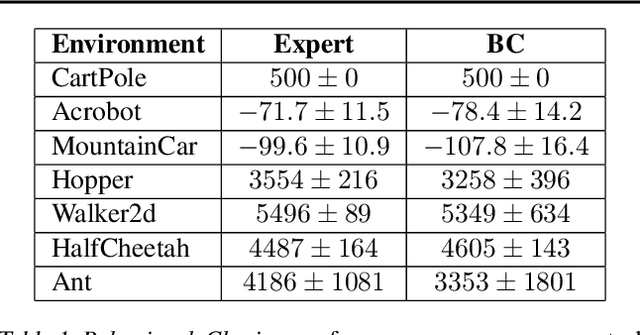
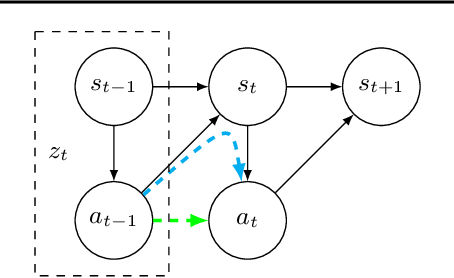
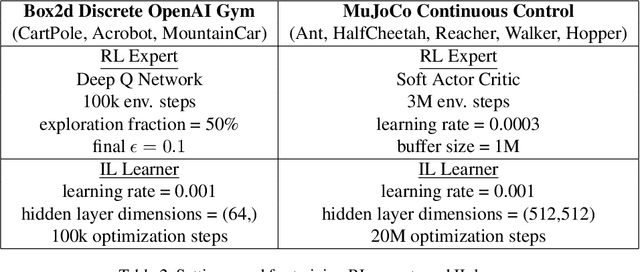
Imitation learning practitioners have often noted that conditioning policies on previous actions leads to a dramatic divergence between "held out" error and performance of the learner in situ. Interactive approaches can provably address this divergence but require repeated querying of a demonstrator. Recent work identifies this divergence as stemming from a "causal confound" in predicting the current action, and seek to ablate causal aspects of current state using tools from causal inference. In this work, we argue instead that this divergence is simply another manifestation of covariate shift, exacerbated particularly by settings of feedback between decisions and input features. The learner often comes to rely on features that are strongly predictive of decisions, but are subject to strong covariate shift. Our work demonstrates a broad class of problems where this shift can be mitigated, both theoretically and practically, by taking advantage of a simulator but without any further querying of expert demonstration. We analyze existing benchmarks used to test imitation learning approaches and find that these benchmarks are realizable and simple and thus insufficient for capturing the harder regimes of error compounding seen in real-world decision making problems. We find, in a surprising contrast with previous literature, but consistent with our theory, that naive behavioral cloning provides excellent results. We detail the need for new standardized benchmarks that capture the phenomena seen in robotics problems.
Deep Knowledge Tracing
Jun 19, 2015
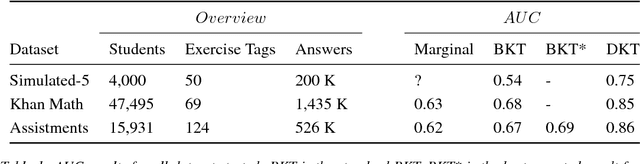
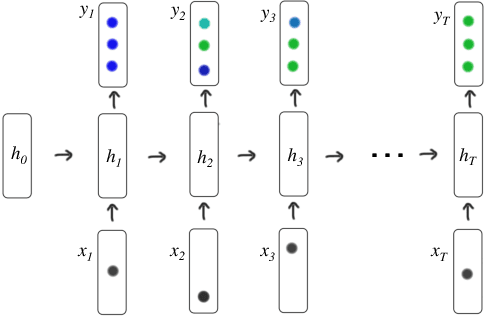
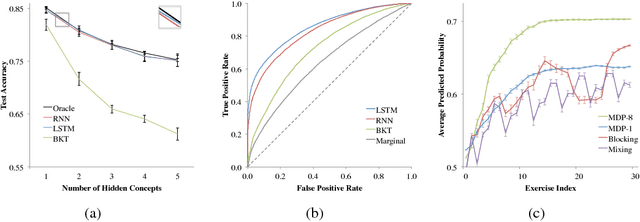
Knowledge tracing---where a machine models the knowledge of a student as they interact with coursework---is a well established problem in computer supported education. Though effectively modeling student knowledge would have high educational impact, the task has many inherent challenges. In this paper we explore the utility of using Recurrent Neural Networks (RNNs) to model student learning. The RNN family of models have important advantages over previous methods in that they do not require the explicit encoding of human domain knowledge, and can capture more complex representations of student knowledge. Using neural networks results in substantial improvements in prediction performance on a range of knowledge tracing datasets. Moreover the learned model can be used for intelligent curriculum design and allows straightforward interpretation and discovery of structure in student tasks. These results suggest a promising new line of research for knowledge tracing and an exemplary application task for RNNs.