 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-EvolveRec: Self-Evolving Recommender Systems with LLM-based Directional Feedback
Feb 13, 2026Traditional methods for automating recommender system design, such as Neural Architecture Search (NAS), are often constrained by a fixed search space defined by human priors, limiting innovation to pre-defined operators. While recent LLM-driven code evolution frameworks shift fixed search space target to open-ended program spaces, they primarily rely on scalar metrics (e.g., NDCG, Hit Ratio) that fail to provide qualitative insights into model failures or directional guidance for improvement. To address this, we propose Self-EvolveRec, a novel framework that establishes a directional feedback loop by integrating a User Simulator for qualitative critiques and a Model Diagnosis Tool for quantitative internal verification. Furthermore, we introduce a Diagnosis Tool - Model Co-Evolution strategy to ensure that evaluation criteria dynamically adapt as the recommendation architecture evolves. Extensive experiments demonstrate that Self-EvolveRec significantly outperforms state-of-the-art NAS and LLM-driven code evolution baselines in both recommendation performance and user satisfaction. Our code is available at https://github.com/Sein-Kim/self_evolverec.
Diverse and Admissible Trajectory Forecasting through Multimodal Context Understanding
Apr 03, 2020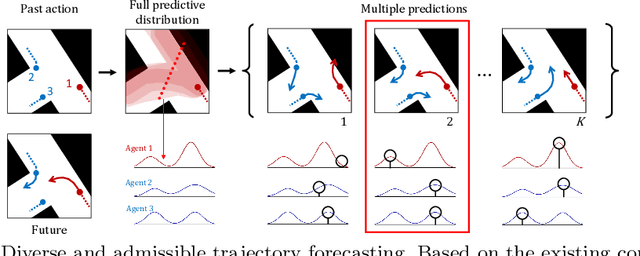
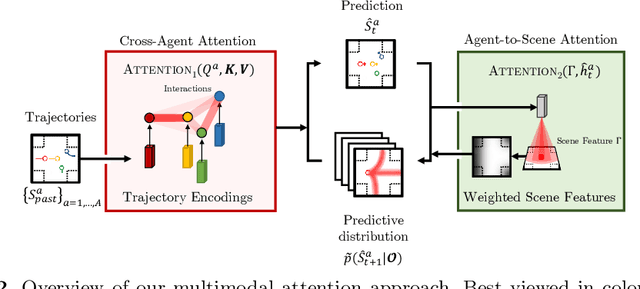
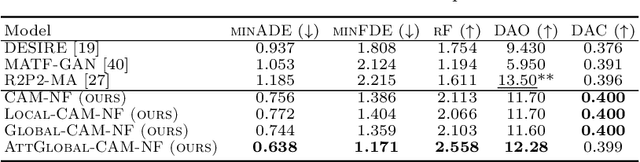
Multi-agent trajectory forecasting in autonomous driving requires an agent to accurately anticipate the behaviors of the surrounding vehicles and pedestrians, for safe and reliable decision-making. Due to partial observability over the goals, contexts, and interactions of agents in these dynamical scenes, directly obtaining the posterior distribution over future agent trajectories remains a challenging problem. In realistic embodied environments, each agent's future trajectories should be diverse since multiple plausible sequences of actions can be used to reach its intended goals, and they should be admissible since they must obey physical constraints and stay in drivable areas. In this paper, we propose a model that fully synthesizes multiple input signals from the multimodal world|the environment's scene context and interactions between multiple surrounding agents|to best model all diverse and admissible trajectories. We offer new metrics to evaluate the diversity of trajectory predictions, while ensuring admissibility of each trajectory. Based on our new metrics as well as those used in prior work, we compare our model with strong baselines and ablations across two datasets and show a 35% performance-improvement over the state-of-the-art.