 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Implicit Action Fields: From Discrete Waypoints to Continuous Functions for Vision-Language-Action Models
Mar 02, 2026Despite the rapid progress of Vision-Language-Action (VLA) models, the prevailing paradigm of predicting discrete waypoints remains fundamentally misaligned with the intrinsic continuity of physical motion. This discretization imposes rigid sampling rates, lacks high-order differentiability, and introduces quantization artifacts that hinder precise, compliant interaction. We propose Neural Implicit Action Fields (NIAF), a paradigm shift that reformulates action prediction from discrete waypoints to continuous action function regression. By utilizing an MLLM as a hierarchical spectral modulator over a learnable motion prior, NIAF synthesizes infinite-resolution trajectories as continuous-time manifolds. This formulation enables analytical differentiability, allowing for explicit supervision of velocity, acceleration, and jerk to ensure mathematical consistency and physical plausibility. Our approach achieves state-of-the-art results on CALVIN and LIBERO benchmarks across diverse backbones. Furthermore, real-world experiments demonstrate that NIAF enables stable impedance control, bridging the gap between high-level semantic understanding and low-level dynamic execution.
End-to-End Humanoid Robot Safe and Comfortable Locomotion Policy
Aug 11, 2025The deployment of humanoid robots in unstructured, human-centric environments requires navigation capabilities that extend beyond simple locomotion to include robust perception, provable safety, and socially aware behavior. Current reinforcement learning approaches are often limited by blind controllers that lack environmental awareness or by vision-based systems that fail to perceive complex 3D obstacles. In this work, we present an end-to-end locomotion policy that directly maps raw, spatio-temporal LiDAR point clouds to motor commands, enabling robust navigation in cluttered dynamic scenes. We formulate the control problem as a Constrained Markov Decision Process (CMDP) to formally separate safety from task objectives. Our key contribution is a novel methodology that translates the principles of Control Barrier Functions (CBFs) into costs within the CMDP, allowing a model-free Penalized Proximal Policy Optimization (P3O) to enforce safety constraints during training. Furthermore, we introduce a set of comfort-oriented rewards, grounded in human-robot interaction research, to promote motions that are smooth, predictable, and less intrusive. We demonstrate the efficacy of our framework through a successful sim-to-real transfer to a physical humanoid robot, which exhibits agile and safe navigation around both static and dynamic 3D obstacles.
IMA-Catcher: An IMpact-Aware Nonprehensile Catching Framework based on Combined Optimization and Learning
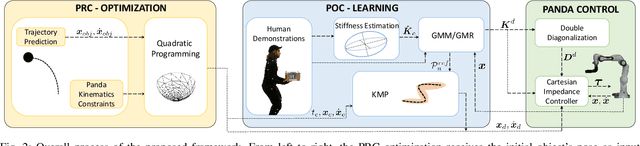
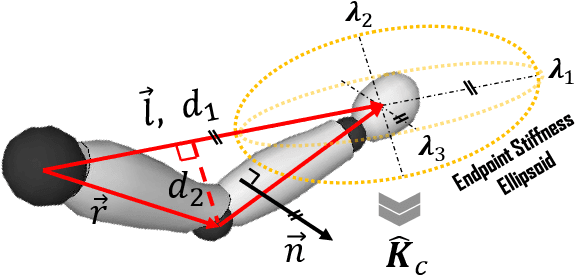
Jun 25, 2025Robotic catching of flying objects typically generates high impact forces that might lead to task failure and potential hardware damages. This is accentuated when the object mass to robot payload ratio increases, given the strong inertial components characterizing this task. This paper aims to address this problem by proposing an implicitly impact-aware framework that accomplishes the catching task in both pre- and post-catching phases. In the first phase, a motion planner generates optimal trajectories that minimize catching forces, while in the second, the object's energy is dissipated smoothly, minimizing bouncing. In particular, in the pre-catching phase, a real-time optimal planner is responsible for generating trajectories of the end-effector that minimize the velocity difference between the robot and the object to reduce impact forces during catching. In the post-catching phase, the robot's position, velocity, and stiffness trajectories are generated based on human demonstrations when catching a series of free-falling objects with unknown masses. A hierarchical quadratic programming-based controller is used to enforce the robot's constraints (i.e., joint and torque limits) and create a stack of tasks that minimizes the reflected mass at the end-effector as a secondary objective. The initial experiments isolate the problem along one dimension to accurately study the effects of each contribution on the metrics proposed. We show how the same task, without velocity matching, would be infeasible due to excessive joint torques resulting from the impact. The addition of reflected mass minimization is then investigated, and the catching height is increased to evaluate the method's robustness. Finally, the setup is extended to catching along multiple Cartesian axes, to prove its generalization in space.
* 25 pages, 17 figures, accepted by International Journal of Robotics Research (IJRR)
A Combined Learning and Optimization Framework to Transfer Human Whole-body Loco-manipulation Skills to Mobile Manipulators
Feb 21, 2024



Humans' ability to smoothly switch between locomotion and manipulation is a remarkable feature of sensorimotor coordination. Leaning and replication of such human-like strategies can lead to the development of more sophisticated robots capable of performing complex whole-body tasks in real-world environments. To this end, this paper proposes a combined learning and optimization framework for transferring human's loco-manipulation soft-switching skills to mobile manipulators. The methodology departs from data collection of human demonstrations for a locomotion-integrated manipulation task through a vision system. Next, the wrist and pelvis motions are mapped to mobile manipulators' End-Effector (EE) and mobile base. A kernelized movement primitive algorithm learns the wrist and pelvis trajectories and generalizes to new desired points according to task requirements. Next, the reference trajectories are sent to a hierarchical quadratic programming controller, where the EE and the mobile base reference trajectories are provided as the first and second priority tasks, generating the feasible and optimal joint level commands. A locomotion-integrated pick-and-place task is executed to validate the proposed approach. After a human demonstrates the task, a mobile manipulator executes the task with the same and new settings, grasping a bottle at non-zero velocity. The results showed that the proposed approach successfully transfers the human loco-manipulation skills to mobile manipulators, even with different geometry.
Impact-Friendly Object Catching at Non-Zero Velocity based on Hybrid Optimization and Learning
Sep 26, 2022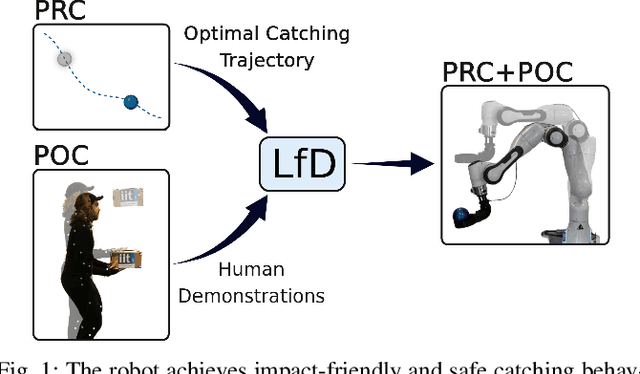

This paper proposes a hybrid optimization and learning method for impact-friendly catching objects at non-zero velocity. Through a constrained Quadratic Programming problem, the method generates optimal trajectories up to the contact point between the robot and the object to minimize their relative velocity and reduce the initial impact forces. Next, the generated trajectories are updated by Kernelized Movement Primitives which are based on human catching demonstrations to ensure a smooth transition around the catching point. In addition, the learned human variable stiffness (HVS) is sent to the robot's Cartesian impedance controller to absorb the post-impact forces and stabilize the catching position. Three experiments are conducted to compare our method with and without HVS against a fixed-position impedance controller (FP-IC). The results showed that the proposed methods outperform the FP-IC, while adding HVS yields better results for absorbing the post-impact forces.
A Hybrid Learning and Optimization Framework to Achieve Physically Interactive Tasks with Mobile Manipulators
Mar 28, 2022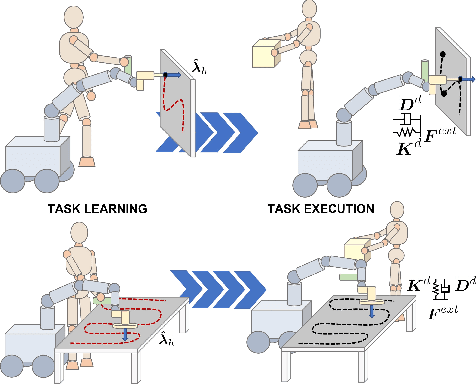
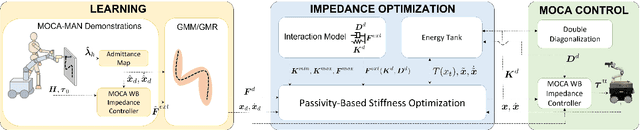
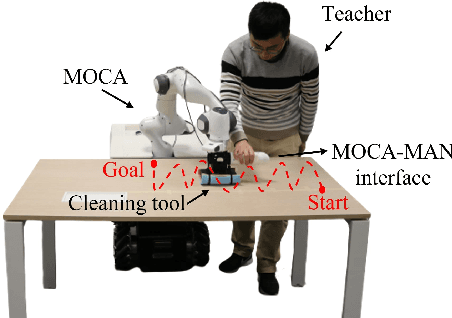
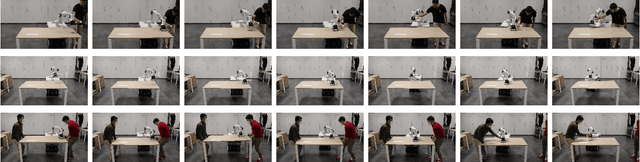
This paper proposes a hybrid learning and optimization framework for mobile manipulators for complex and physically interactive tasks. The framework exploits the MOCA-MAN interface to obtain intuitive and simplified human demonstrations and Gaussian Mixture Model/Gaussian Mixture Regression to encode and generate the learned task requirements in terms of position, velocity, and force profiles. Next, using the desired trajectories and force profiles generated by GMM/GMR, the impedance parameters of a Cartesian impedance controller are optimized online through a Quadratic Program augmented with an energy tank to ensure the passivity of the controlled system. Two experiments are conducted to validate the framework, comparing our method with two approaches with constant stiffness (high and low). The results showed that the proposed method outperforms the other two cases in terms of trajectory tracking and generated interaction forces, even in the presence of disturbances such as unexpected end-effector collisions.