 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEcho-DM: Ultrasound Marker Removal via Conditional Latent Diffusion and Region-Aware Fusion
Jun 08, 2026Clinical ultrasound images often contain artificial markers, such as measurement calipers and text, to assist diagnostic interpretation and comparison. However, these markers can introduce shortcut bias in downstream automated analysis, encouraging deep learning models to rely on marker-related cues rather than clinically meaningful anatomy. Existing marker removal methods are either mask-dependent and vulnerable to error propagation, or mask-free deterministic restorers that may over-smooth ultrasound texture and perturb unaffected background regions. To address these challenges, we present Echo-DM, a framework for ultrasound marker removal via conditional latent diffusion and region-aware fusion. Echo-DM follows a common encoder-diffusion-decoder pipeline, where a DiT-based conditional latent diffusion network performs global restoration and a region-aware fusion module enforces preservation-aware image-space refinement under end-to-end mask-free inference. Building on this fixed core design, we further instantiate Echo-DM-V and Echo-DM-R with VAE-based and RAE-based latent modules, respectively, which demonstrates that the Echo-DM architecture is compatible with diverse latent-module instantiations. Extensive experiments on Echo-PAIR, a large-scale paired clinical ultrasound dataset, demonstrate superior marker removal and strong anatomical fidelity compared with representative two-stage baselines, while providing favorable quality--efficiency trade-offs across deployment settings. Data, code and models will be released at https://github.com/MiliLab/Echo-DM.
SAMe: A Semantic Anatomy Mapping Engine for Robotic Ultrasound
Apr 28, 2026Robotic ultrasound has advanced local image-driven control, contact regulation, and view optimization, yet current systems lack the anatomical understanding needed to determine what to scan, where to begin, and how to adapt to individual patient anatomy. These gaps make systems still reliant on expert intervention to initiate scanning. Here we present SAMe, a semantic anatomy mapping engine that provides robotic ultrasound with an explicit anatomical prior layer. SAMe addresses scan initiation as a target-to-anatomy-to-action process: it grounds under-specified clinical complaints into structured target organs, instantiates a patient-specific anatomical representation for the grounded targets from a single external body image, and translates this representation into control-facing 6-DoF probe initialization states without any additional registration using preoperative CT or MRI. The anatomical representation maintained by SAMe is explicit, lightweight (single-organ inference in 0.08s), and compatible with downstream control by design. Across semantic grounding, anatomical instantiation, and real-robot evaluation, SAMe shows strong performance across the full initialization pipeline. In real-robot experiments, SAMe achieved overall organ-hit rates of 97.3% for liver initialization and 81.7% for kidney initialization across the evaluated target sets. Even when restricted to the centroid target, SAMe outperformed the surface-heuristic baseline for both liver and kidney initialization. These results establish an explicit anatomical prior layer that addresses scan initialization and is designed to support broader downstream autonomous scanning pipelines, providing the anatomical foundation for complaint-driven, anatomically informed robotic ultrasonography.
Deep learning based sferics recognition for AMT data processing in the dead band
Sep 22, 2022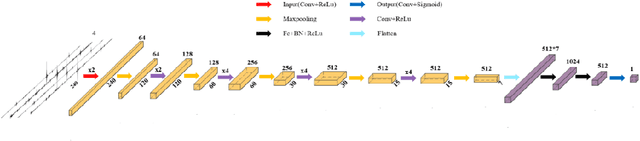
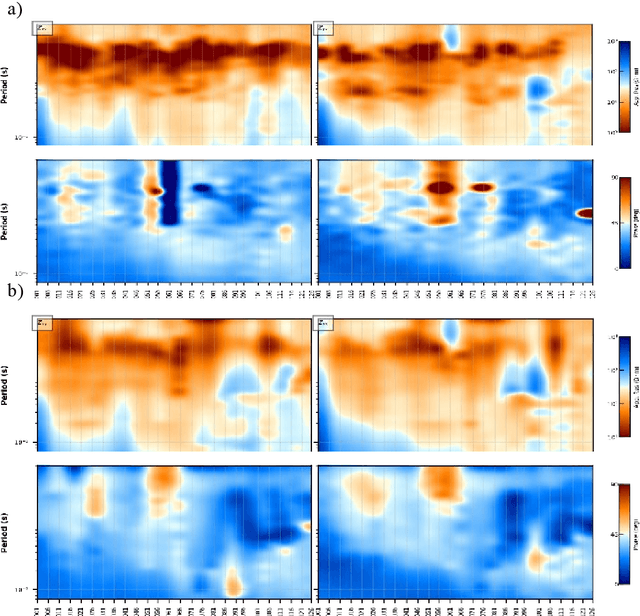
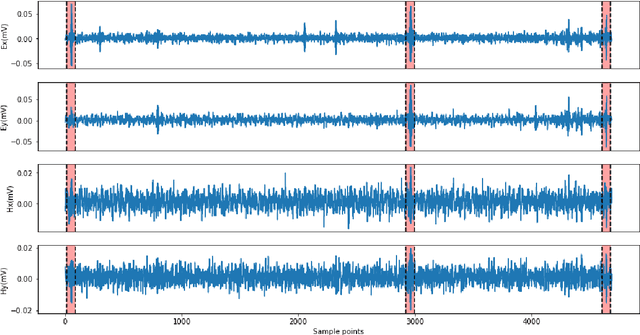
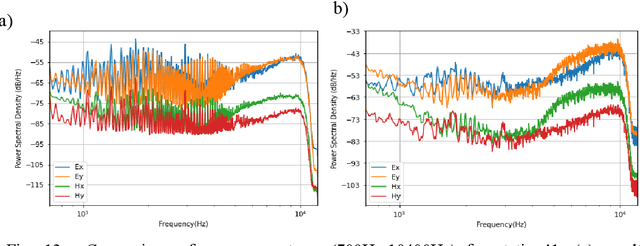
In the audio magnetotellurics (AMT) sounding data processing, the absence of sferic signals in some time ranges typically results in a lack of energy in the AMT dead band, which may cause unreliable resistivity estimate. We propose a deep convolutional neural network (CNN) to automatically recognize sferic signals from redundantly recorded data in a long time range and use them to compensate for the resistivity estimation. We train the CNN by using field time series data with different signal to noise rations that were acquired from different regions in mainland China. To solve the potential overfitting problem due to the limited number of sferic labels, we propose a training strategy that randomly generates training samples (with random data augmentations) while optimizing the CNN model parameters. We stop the training process and data generation until the training loss converges. In addition, we use a weighted binary cross-entropy loss function to solve the sample imbalance problem to better optimize the network, use multiple reasonable metrics to evaluate network performance, and carry out ablation experiments to optimally choose the model hyperparameters. Extensive field data applications show that our trained CNN can robustly recognize sferic signals from noisy time series for subsequent impedance estimation. The subsequent processing results show that our method can significantly improve S/N and effectively solve the problem of lack of energy in dead band. Compared to the traditional processing method without sferic compensation, our method can generate a smoother and more reasonable apparent resistivity-phase curves and depolarized phase tensor, correct the estimation error of sudden drop of high-frequency apparent resistivity and abnormal behavior of phase reversal, and finally better restore the real shallow subsurface resistivity structure.