 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Michigan Robotics Undergraduate Curriculum: Defining the Discipline of Robotics for Equity and Excellence
Aug 14, 2023The Robotics Major at the University of Michigan was successfully launched in the 2022-23 academic year as an innovative step forward to better serve students, our communities, and our society. Building on our guiding principle of "Robotics with Respect" and our larger Robotics Pathways model, the Michigan Robotics Major was designed to define robotics as a true academic discipline with both equity and excellence as our highest priorities. Understanding that talent is equally distributed but opportunity is not, the Michigan Robotics Major has embraced an adaptable curriculum that is accessible through a diversity of student pathways and enables successful and sustained career-long participation in robotics, AI, and automation professions. The results after our planning efforts (2019-22) and first academic year (2022-23) have been highly encouraging: more than 100 students declared Robotics as their major, completion of the Robotics major by our first two graduates, soaring enrollments in our Robotics classes, thriving partnerships with Historically Black Colleges and Universities. This document provides our original curricular proposal for the Robotics Undergraduate Program at the University of Michigan, submitted to the Michigan Association of State Universities in April 2022 and approved in June 2022. The dissemination of our program design is in the spirit of continued growth for higher education towards realizing equity and excellence. The most recent version of this document is also available on Google Docs through this link: https://ocj.me/robotics_major
Optimizing Lead Time in Fall Detection for a Planar Bipedal Robot
Mar 27, 2023For legged robots to operate in complex terrains, they must be robust to the disturbances and uncertainties they encounter. This paper contributes to enhancing robustness through the design of fall detection/prediction algorithms that will provide sufficient lead time for corrective motions to be taken. Falls can be caused by abrupt (fast-acting), incipient (slow-acting), or intermittent (non-continuous) faults. Early fall detection is a challenging task due to the masking effects of controllers (through their disturbance attenuation actions), the inverse relationship between lead time and false positive rates, and the temporal behavior of the faults/underlying factors. In this paper, we propose a fall detection algorithm that is capable of detecting both incipient and abrupt faults while maximizing lead time and meeting desired thresholds on the false positive and negative rates.
Terrain-Aware Foot Placement for Bipedal Locomotion Combining Model Predictive Control, Virtual Constraints, and the ALIP
Sep 30, 2021
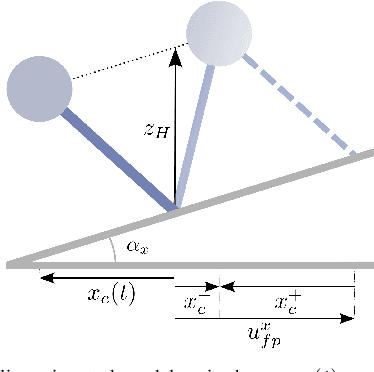
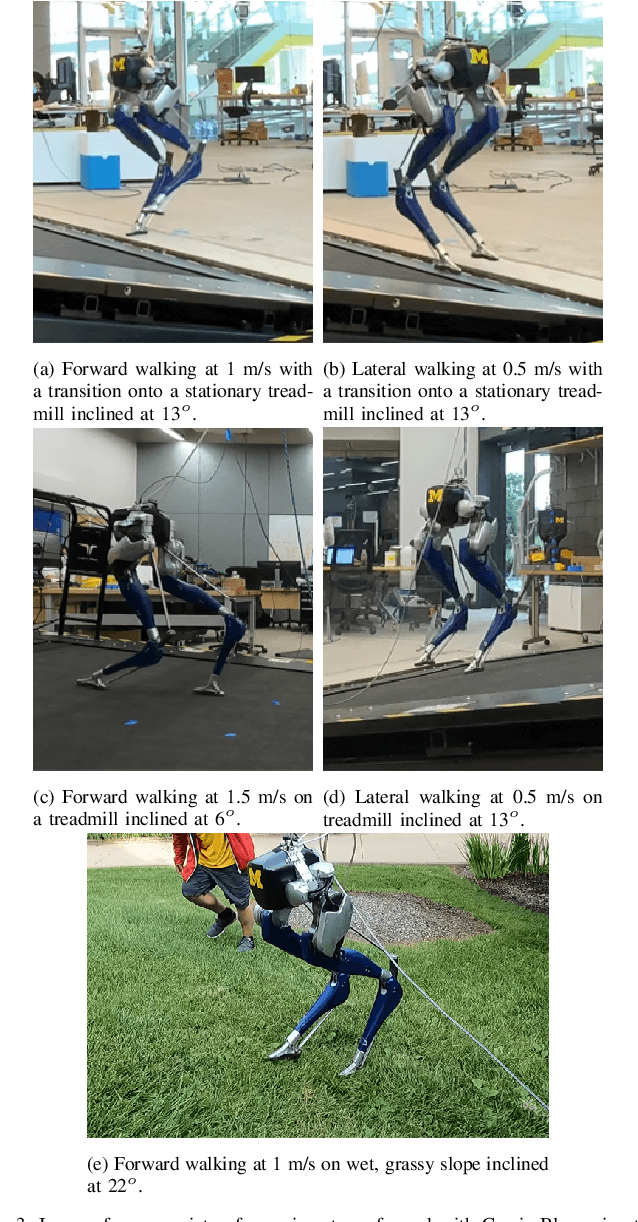
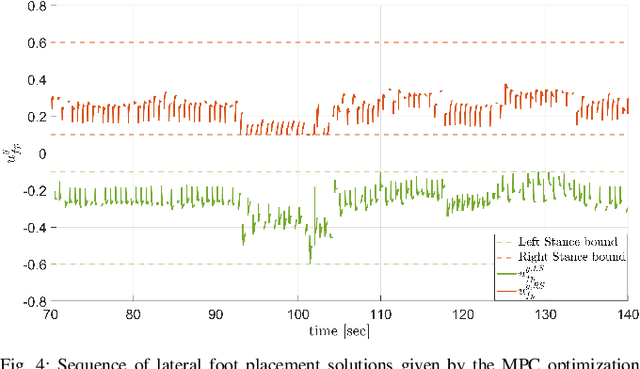
This paper draws upon three themes in the bipedal control literature to achieve highly agile, terrain-aware locomotion. By terrain aware, we mean the robot can use information on terrain slope and friction cone as supplied by state-of-the-art mapping and trajectory planning algorithms. The process starts with abstracting from the full dynamics of a Cassie 3D bipedal robot, an exact low-dimensional representation of its centroidal dynamics, parameterized by angular momentum. Under a piecewise planar terrain assumption, and the elimination of terms for the angular momentum about the robot's center of mass, the centroidal dynamics become linear and has dimension four. Four-step-horizon model predictive control (MPC) of the centroidal dynamics provides step-to-step foot placement commands. Importantly, we also include the intra-step dynamics at 10 ms intervals so that realistic terrain-aware constraints on robot's evolution can be imposed in the MPC formulation. The output of the MPC is directly implemented on Cassie through the method of virtual constraints. In experiments, we validate the performance of our control strategy for the robot on inclined and stationary terrain, both indoors on a treadmill and outdoors on a hill.
Zero Dynamics, Pendulum Models, and Angular Momentum in Feedback Control of Bipedal Locomotion
May 17, 2021
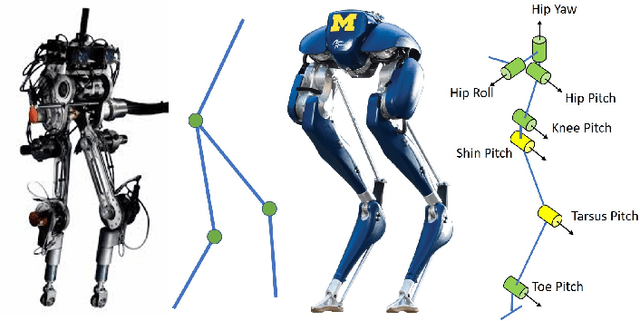
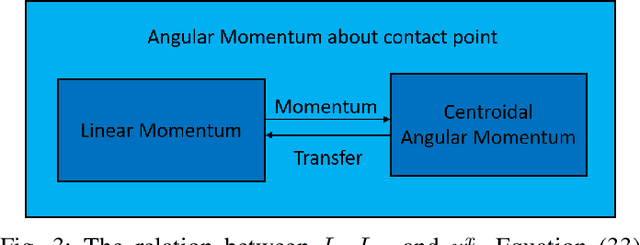
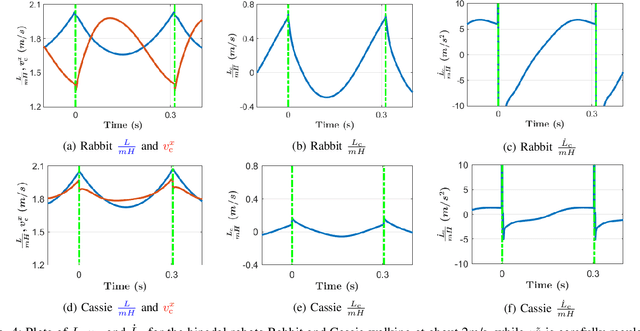
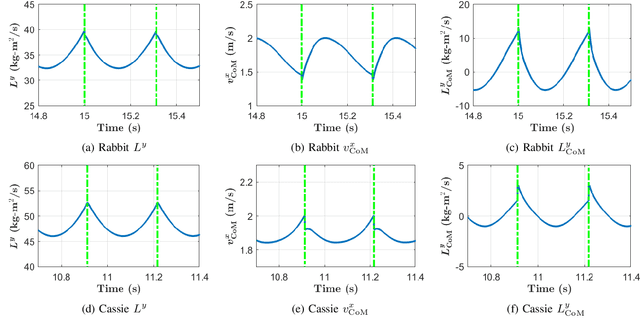
Low-dimensional models are ubiquitous in the bipedal robotics literature. On the one hand, are the simplified pendulum models selected to capture the center of mass dynamics. On the other hand, is the passive low-dimensional model induced by virtual constraints. In the first case, the low-dimensional model is valued for its physical insight and analytical tractability. In the second case, the low-dimensional model is integral to a rigorous analysis of the stability of walking gaits in the full-dimensional model of the robot. This paper brings these two approaches together, clarifying their commonalities and differences. In the process of doing so, we argue that angular momentum about the contact point is a better indicator of robot state than linear velocity. Concretely, we show that an approximate (pendulum and zero dynamics) model parameterized by angular momentum is more accurate on a physical robot (e.g., legs with mass) than is a related approximate model parameterized in terms of linear velocity. We implement an associated angular-momentum-based controller on Cassie, a 3D robot, and demonstrate high agility and robustness in experiments.
Angular Momentum about the Contact Point for Control of Bipedal Locomotion: Validation in a LIP-based Controller
Aug 25, 2020
In the control of bipedal locomotion, linear velocity of the center of mass has been widely accepted as a primary variable for summarizing a robot's state vector. The ubiquitous massless-legged linear inverted pendulum (LIP) model is based on it. In this paper, we argue that angular momentum about the contact point has several properties that make it superior to linear velocity for feedback control. So as not to confuse the benefits of angular momentum with any other control design decisions, we first reformulate the standard LIP controller in terms of angular momentum. We then implement the resulting feedback controller on the 20 degree-of-freedom bipedal robot, Cassie Blue, where each leg accounts for nearly one-third of the robot's total mass of 35~Kg. Under this controller, the robot achieves fast walking, rapid turning while walking, large disturbance rejection, and locomotion on rough terrain. The reasoning developed in the paper is applicable to other control design philosophies, whether they be Hybrid Zero Dynamics or Reinforcement Learning.
Feedback Control of a Cassie Bipedal Robot: Walking, Standing, and Riding a Segway
Sep 19, 2018
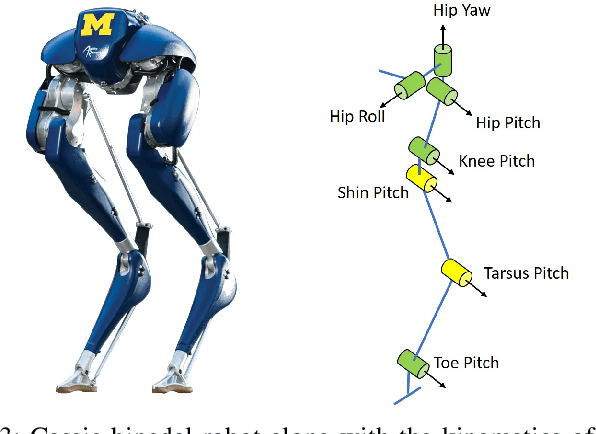
The Cassie bipedal robot designed by Agility Robotics is providing academics a common platform for sharing and comparing algorithms for locomotion, perception, and navigation. This paper focuses on feedback control for standing and walking using the methods of virtual constraints and gait libraries. The designed controller was implemented six weeks after the robot arrived at the University of Michigan and allowed it to stand in place as well as walk over sidewalks, grass, snow, sand, and burning brush. The controller for standing also enables the robot to ride a Segway. A model of the Cassie robot has been placed on GitHub and the controller will also be made open source if the paper is accepted.
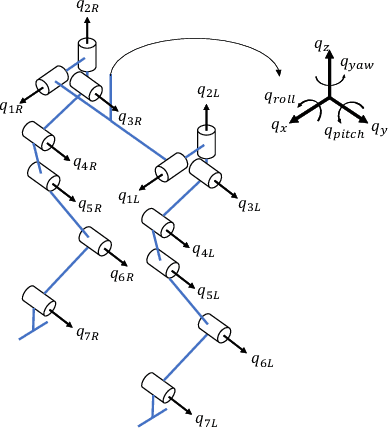
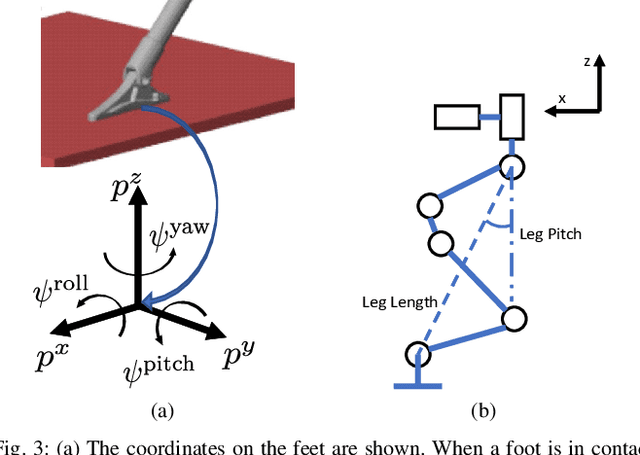
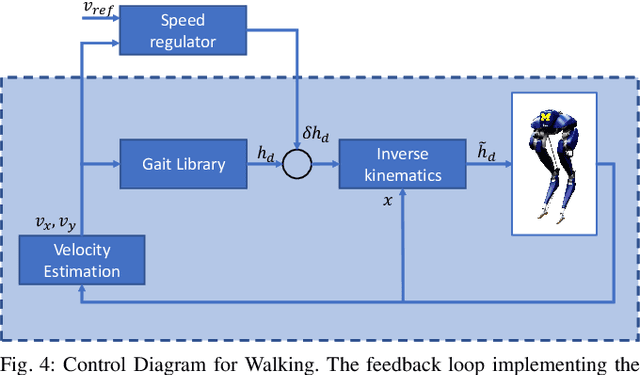
Feedback Control of an Exoskeleton for Paraplegics: Toward Robustly Stable Hands-free Dynamic Walking
May 21, 2018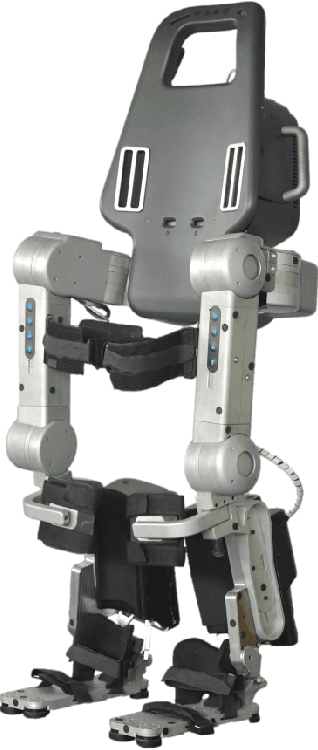
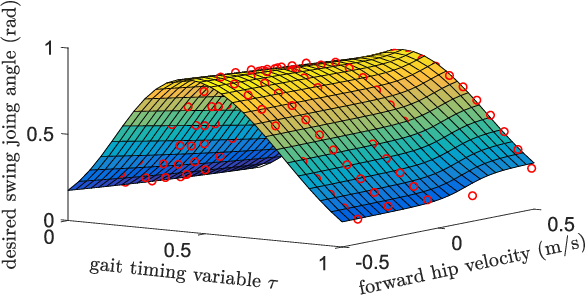
This manuscript presents control of a high-DOF fully actuated lower-limb exoskeleton for paraplegic individuals. The key novelty is the ability for the user to walk without the use of crutches or other external means of stabilization. We harness the power of modern optimization techniques and supervised machine learning to develop a smooth feedback control policy that provides robust velocity regulation and perturbation rejection. Preliminary evaluation of the stability and robustness of the proposed approach is demonstrated through the Gazebo simulation environment. In addition, preliminary experimental results with (complete) paraplegic individuals are included for the previous version of the controller.
Self-synchronization and Self-stabilization of 3D Bipedal Walking Gaits
Jul 07, 2017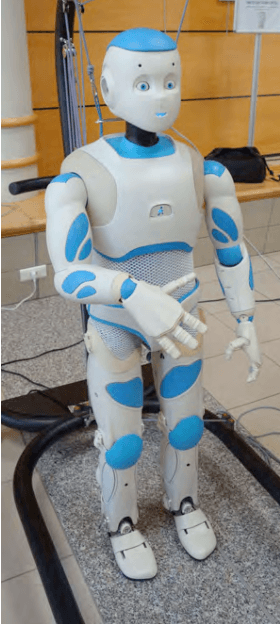
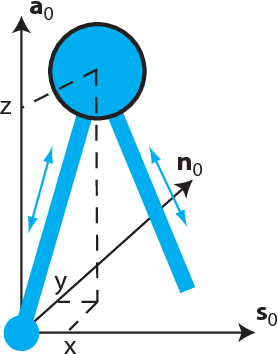
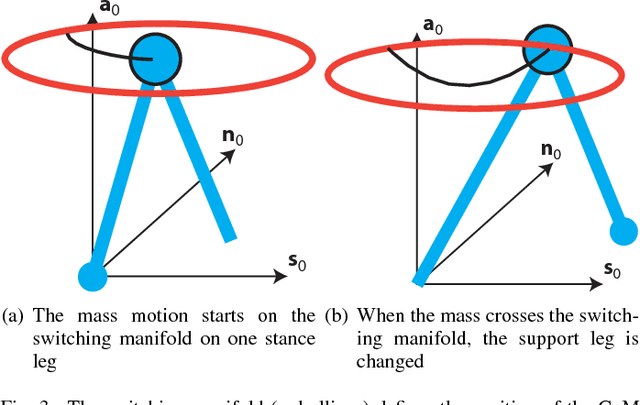
This paper seeks insight into stabilization mechanisms for periodic walking gaits in 3D bipedal robots. Based on this insight, a control strategy based on virtual constraints, which imposes coordination between joints rather than a temporal evolution, will be proposed for achieving asymptotic convergence toward a periodic motion. For planar bipeds with one degree of underactuation, it is known that a vertical displacement of the center of mass---with downward velocity at the step transition---induces stability of a walking gait. This paper concerns the qualitative extension of this type of property to 3D walking with two degrees of underactuation. It is shown that a condition on the position of the center of mass in the horizontal plane at the transition between steps induces synchronization between the motions in the sagittal and frontal planes. A combination of the conditions for self-synchronization and vertical oscillations leads to stable gaits. The algorithm for self-stabilization of 3D walking gaits is first developed for a simplified model of a walking robot (an inverted pendulum with variable length legs), and then it is extended to a complex model of the humanoid robot Romeo using the notion of Hybrid Zero Dynamics. Simulations of the model of the robot illustrate the efficacy of the method and its robustness.