 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Regret Minimization Framework on Preference Learning in Large Language Models
Jun 08, 2026Reinforcement learning with verifiable rewards (RLVR) has enabled progress on reasoning-intensive tasks by relying on task-specific verifiers that provide automated correctness signals. However, many realistic language tasks are difficult to equip with reliable verifiers, motivating a growing reliance on reinforcement learning from human feedback (RLHF). In this setting, we argue that a closer examination of how human feedback should be interpreted is essential. We introduce Regret-based Preference Optimization $(\textbf{RePO})$, which reframes RLHF through $\textit{regret minimization}$ rather than reward maximization. Human preferences are often shaped by $\textit{prospective}$ anticipation of outcomes and $\textit{counterfactual}$ comparisons to alternative behaviors, rather than by immediate, outcome-independent utility. $\textbf{RePO}$ captures this structure by modeling preferences as behavior-conditioned assessments of relative suboptimality. Experiments on mathematical reasoning benchmarks and human preference datasets demonstrate consistent performance gains, indicating that $\textbf{RePO}$ is an effective and human-aligned approach for training large language models.
SafeDPO: A Simple Approach to Direct Preference Optimization with Enhanced Safety
May 26, 2025As Large Language Models (LLMs) continue to advance and find applications across a growing number of fields, ensuring the safety of LLMs has become increasingly critical. To address safety concerns, recent studies have proposed integrating safety constraints into Reinforcement Learning from Human Feedback (RLHF). However, these approaches tend to be complex, as they encompass complicated procedures in RLHF along with additional steps required by the safety constraints. Inspired by Direct Preference Optimization (DPO), we introduce a new algorithm called SafeDPO, which is designed to directly optimize the safety alignment objective in a single stage of policy learning, without requiring relaxation. SafeDPO introduces only one additional hyperparameter to further enhance safety and requires only minor modifications to standard DPO. As a result, it eliminates the need to fit separate reward and cost models or to sample from the language model during fine-tuning, while still enhancing the safety of LLMs. Finally, we demonstrate that SafeDPO achieves competitive performance compared to state-of-the-art safety alignment algorithms, both in terms of aligning with human preferences and improving safety.
LobsDICE: Offline Imitation Learning from Observation via Stationary Distribution Correction Estimation
Feb 28, 2022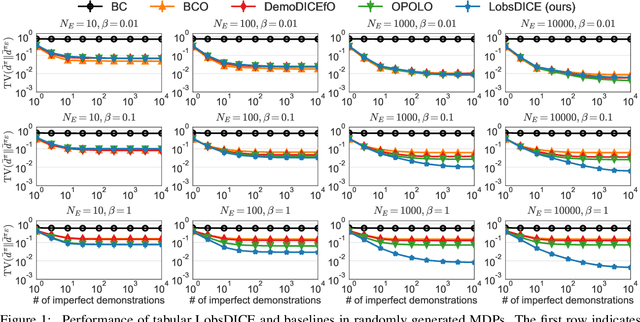
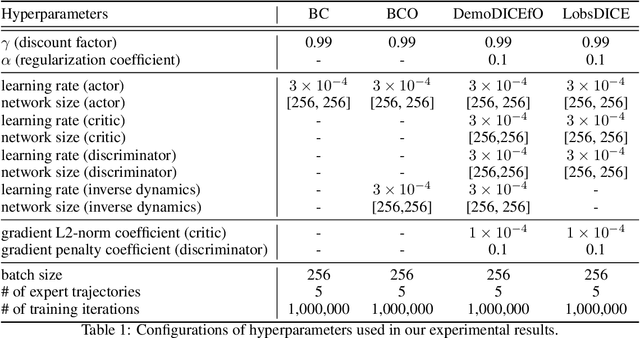
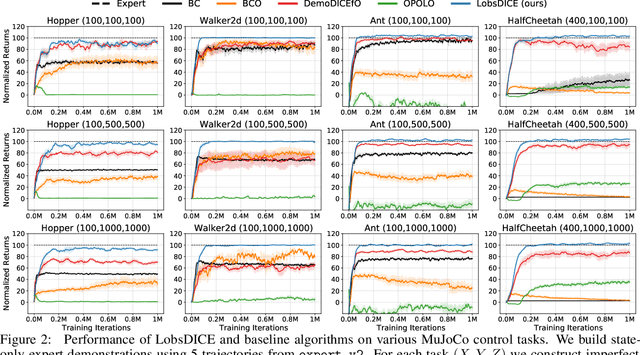
We consider the problem of imitation from observation (IfO), in which the agent aims to mimic the expert's behavior from the state-only demonstrations by experts. We additionally assume that the agent cannot interact with the environment but has access to the action-labeled transition data collected by some agent with unknown quality. This offline setting for IfO is appealing in many real-world scenarios where the ground-truth expert actions are inaccessible and the arbitrary environment interactions are costly or risky. In this paper, we present LobsDICE, an offline IfO algorithm that learns to imitate the expert policy via optimization in the space of stationary distributions. Our algorithm solves a single convex minimization problem, which minimizes the divergence between the two state-transition distributions induced by the expert and the agent policy. On an extensive set of offline IfO tasks, LobsDICE shows promising results, outperforming strong baseline algorithms.
Variational Interaction Information Maximization for Cross-domain Disentanglement
Dec 08, 2020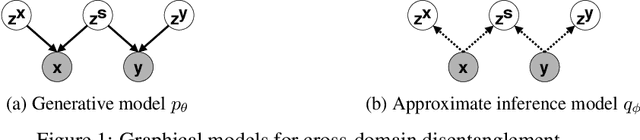
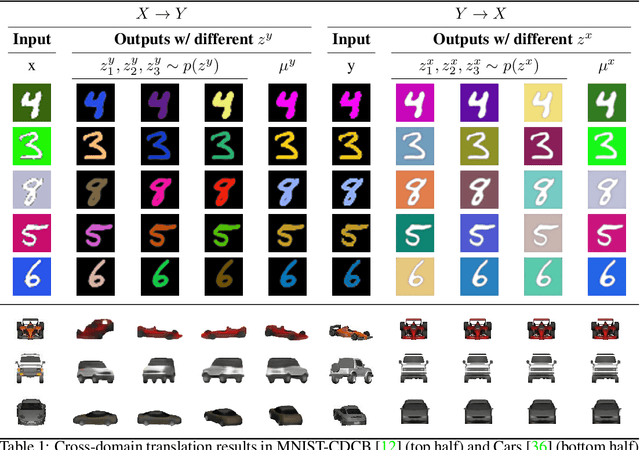
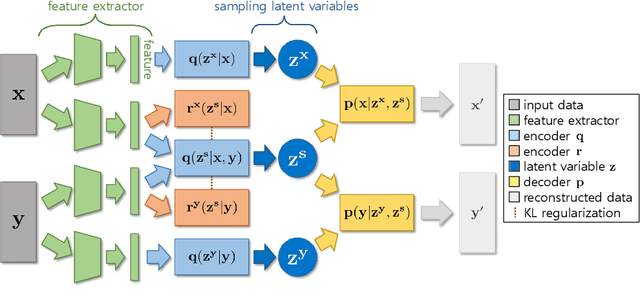
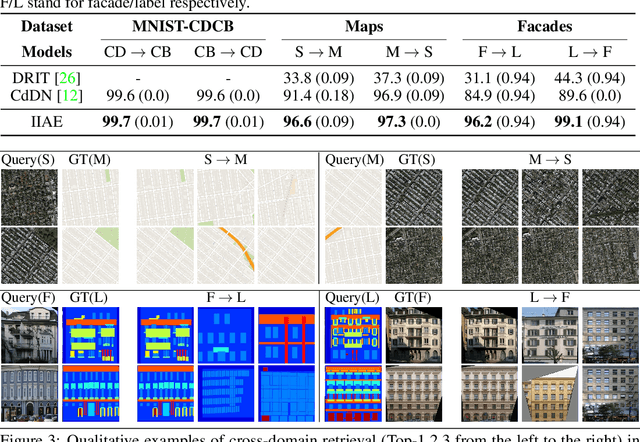
Cross-domain disentanglement is the problem of learning representations partitioned into domain-invariant and domain-specific representations, which is a key to successful domain transfer or measuring semantic distance between two domains. Grounded in information theory, we cast the simultaneous learning of domain-invariant and domain-specific representations as a joint objective of multiple information constraints, which does not require adversarial training or gradient reversal layers. We derive a tractable bound of the objective and propose a generative model named Interaction Information Auto-Encoder (IIAE). Our approach reveals insights on the desirable representation for cross-domain disentanglement and its connection to Variational Auto-Encoder (VAE). We demonstrate the validity of our model in the image-to-image translation and the cross-domain retrieval tasks. We further show that our model achieves the state-of-the-art performance in the zero-shot sketch based image retrieval task, even without external knowledge. Our implementation is publicly available at: https://github.com/gr8joo/IIAE