 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData-Driven Robust Barrier Functions for Safe, Long-Term Operation
Apr 15, 2021
Applications that require multi-robot systems to operate independently for extended periods of time in unknown or unstructured environments face a broad set of challenges, such as hardware degradation, changing weather patterns, or unfamiliar terrain. To operate effectively under these changing conditions, algorithms developed for long-term autonomy applications require a stronger focus on robustness. Consequently, this work considers the ability to satisfy the operation-critical constraints of a disturbed system in a modular fashion, which means compatibility with different system objectives and disturbance representations. Toward this end, this paper introduces a controller-synthesis approach to constraint satisfaction for disturbed control-affine dynamical systems by utilizing Control Barrier Functions (CBFs). The aforementioned framework is constructed by modelling the disturbance as a union of convex hulls and leveraging previous work on CBFs for differential inclusions. This method of disturbance modeling grants compatibility with different disturbance-estimation methods. For example, this work demonstrates how a disturbance learned via a Gaussian process may be utilized in the proposed framework. These estimated disturbances are incorporated into the proposed controller-synthesis framework which is then tested on a fleet of robots in different scenarios.
A Safety and Passivity Filter for Robot Teleoperation Systems
Feb 17, 2021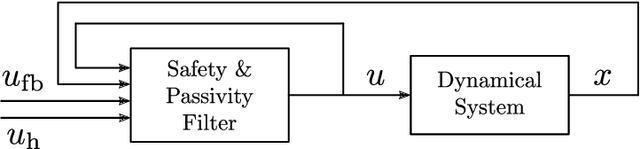
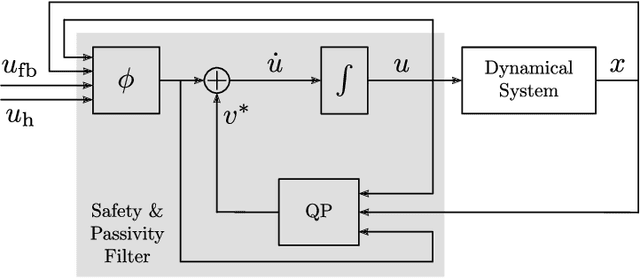
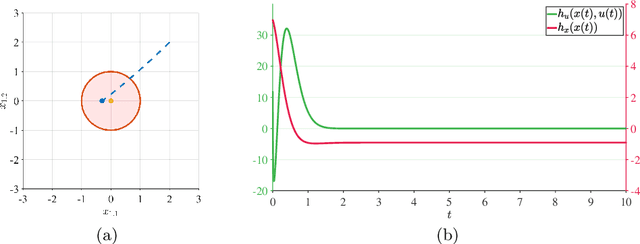
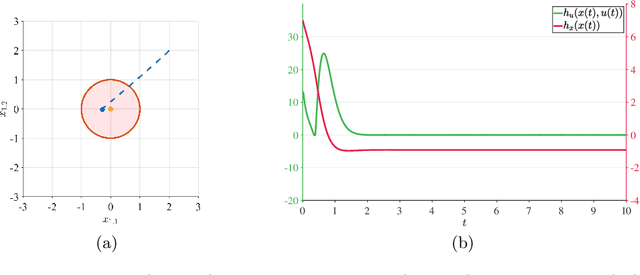
In this paper, we present a way of enforcing safety and passivity properties of robot teleoperation systems, where a human operator interacts with a dynamical system modeling the robot. The approach does so in a holistic fashion, by combining safety and passivity constraints in a single optimization-based controller which effectively filters the desired control input before supplying it to the system. The result is a safety and passivity filter implemented as a convex quadratic program which can be solved efficiently and employed in an online fashion in many robotic teleoperation applications. Simulation results show the benefits of the approach developed in this paper applied to the human teleoperation of a second-order dynamical system.
Data-Driven Adaptive Task Allocation for Heterogeneous Multi-Robot Teams Using Robust Control Barrier Functions
Nov 10, 2020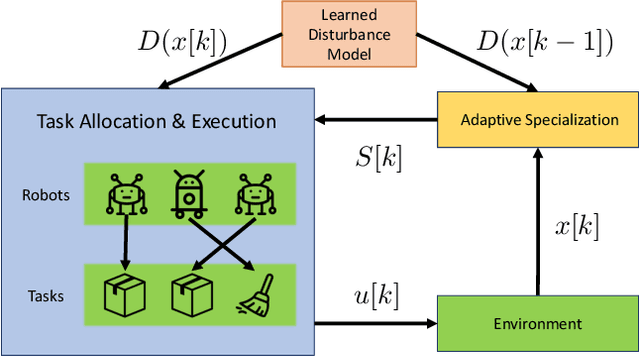
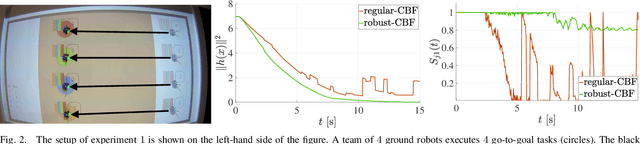
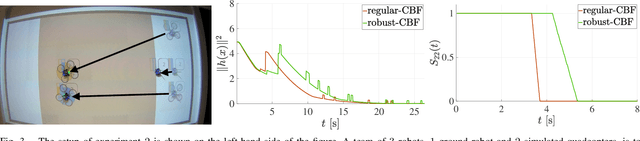
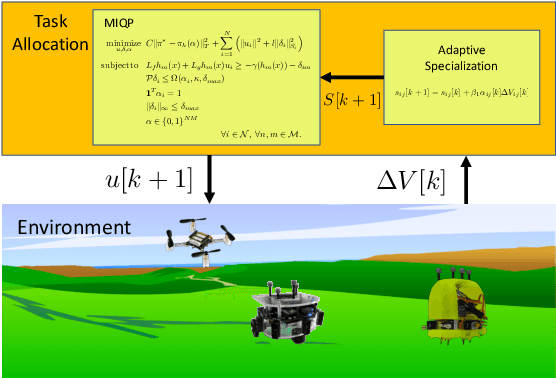
Multi-robot task allocation is a ubiquitous problem in robotics due to its applicability in a variety of scenarios. Adaptive task-allocation algorithms account for unknown disturbances and unpredicted phenomena in the environment where robots are deployed to execute tasks. However, this adaptivity typically comes at the cost of requiring precise knowledge of robot models in order to evaluate the allocation effectiveness and to adjust the task assignment online. As such, environmental disturbances can significantly degrade the accuracy of the models which in turn negatively affects the quality of the task allocation. In this paper, we leverage Gaussian processes, differential inclusions, and robust control barrier functions to learn environmental disturbances in order to guarantee robust task execution. We show the implementation and the effectiveness of the proposed framework on a real multi-robot system.
Adaptive Task Allocation for Heterogeneous Multi-Robot Teams with Evolving and Unknown Robot Capabilities
Mar 06, 2020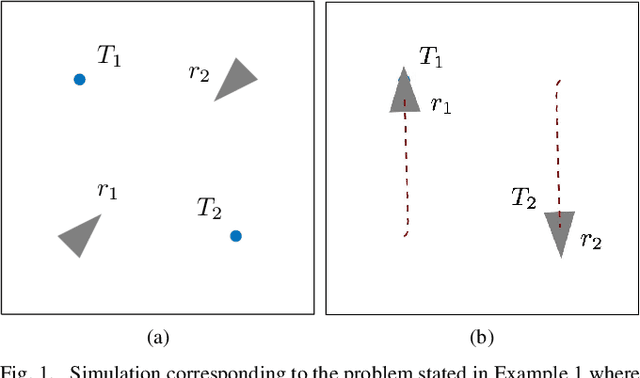
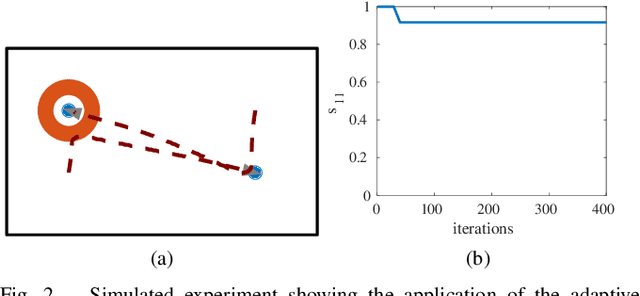
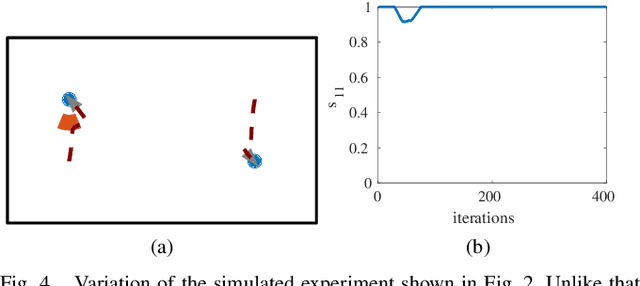
For multi-robot teams with heterogeneous capabilities, typical task allocation methods assign tasks to robots based on the suitability of the robots to perform certain tasks as well as the requirements of the task itself. However, in real-world deployments of robot teams, the suitability of a robot might be unknown prior to deployment, or might vary due to changing environmental conditions. This paper presents an adaptive task allocation and task execution framework which allows individual robots to prioritize among tasks while explicitly taking into account their efficacy at performing the tasks---the parameters of which might be unknown before deployment and/or might vary over time. Such a \emph{specialization} parameter---encoding the effectiveness of a given robot towards a task---is updated on-the-fly, allowing our algorithm to reassign tasks among robots with the aim of executing them. The developed framework requires no explicit model of the changing environment or of the unknown robot capabilities---it only takes into account the progress made by the robots at completing the tasks. Simulations and experiments demonstrate the efficacy of the proposed approach during variations in environmental conditions and when robot capabilities are unknown before deployment.
A Set-Theoretic Approach to Multi-Task Execution and Prioritization
Mar 06, 2020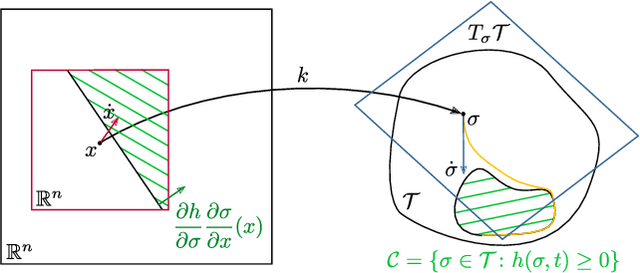
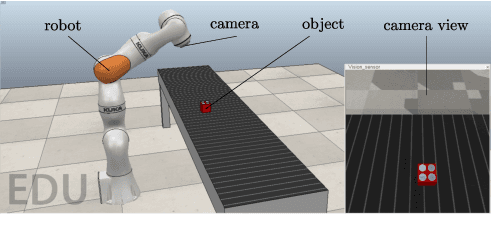
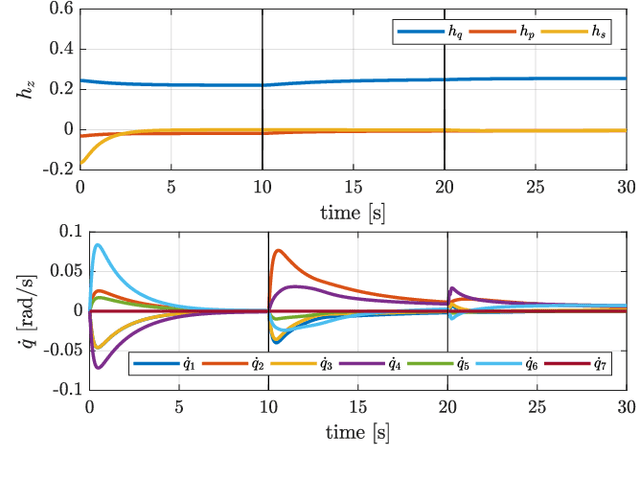
Executing multiple tasks concurrently is important in many robotic applications. Moreover, the prioritization of tasks is essential in applications where safety-critical tasks need to precede application-related objectives, in order to protect both the robot from its surroundings and vice versa. Furthermore, the possibility of switching the priority of tasks during their execution gives the robotic system the flexibility of changing its objectives over time. In this paper, we present an optimization-based task execution and prioritization framework that lends itself to the case of time-varying priorities as well as variable number of tasks. We introduce the concept of extended set-based tasks, encode them using control barrier functions, and execute them by means of a constrained-optimization problem, which can be efficiently solved in an online fashion. Finally, we show the application of the proposed approach to the case of a redundant robotic manipulator.
An Optimal Task Allocation Strategy for Heterogeneous Multi-Robot Systems
Mar 20, 2019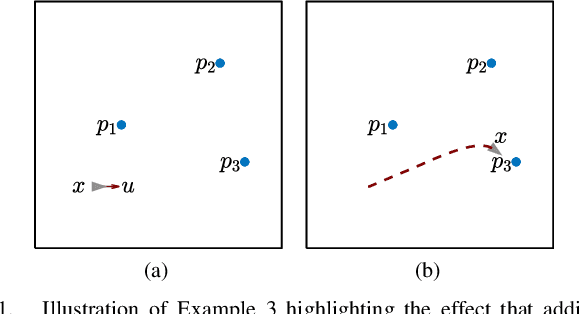

For a team of heterogeneous robots executing multiple tasks, we propose a novel algorithm to optimally allocate tasks to robots while accounting for their different capabilities. Motivated by the need that robot teams have in many real-world applications of remaining operational for long periods of time, we allow each robot to choose tasks taking into account the energy consumed by executing them, besides the global specifications on the task allocation. The tasks are encoded as constraints in an energy minimization problem solved at each point in time by each robot. The prioritization of a task over others -- effectively signifying the allocation of the task to that particular robot -- occurs via the introduction of slack variables in the task constraints. Moreover, the suitabilities of certain robots towards certain tasks are also taken into account to generate a task allocation algorithm for a team of robots with heterogeneous capabilities. The efficacy of the developed approach is demonstrated both in simulation and on a team of real robots.
Persistification of Robotic Tasks
Mar 14, 2019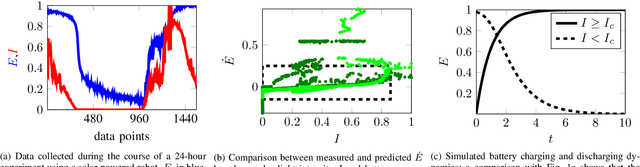
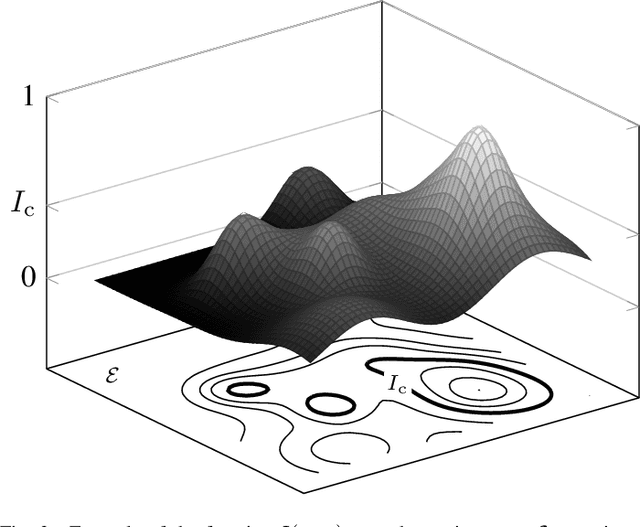
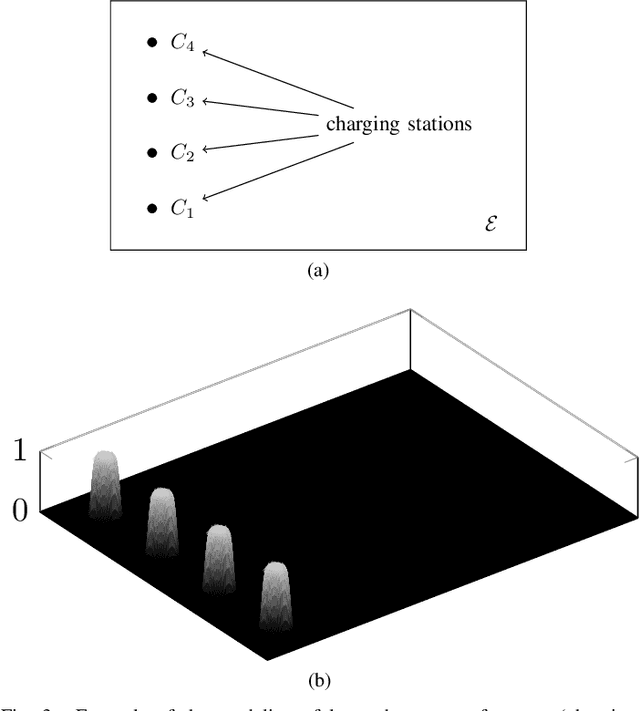
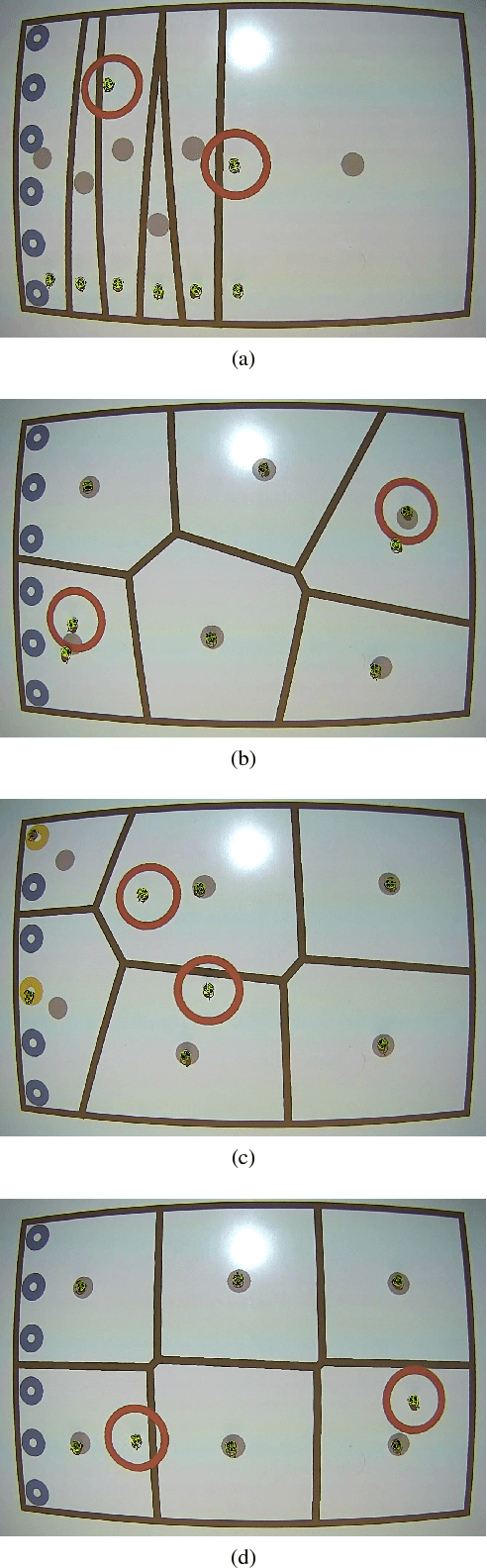
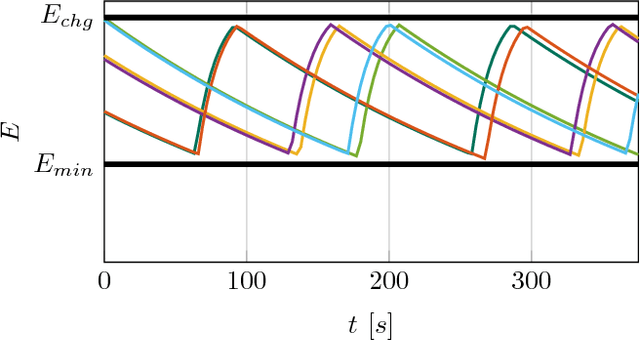
In this paper we propose a control framework that enables robots to execute tasks persistently, i. e., over time horizons much longer than robots' battery life, which is achieved by ensuring that the energy stored in the batteries of the robots is never depleted. This is framed as a set invariance constraint in an optimization problem whose objective is that of minimizing the distance between the robots' control inputs and nominal control inputs corresponding to the task that is to be executed. We refer to this process as the persistification of a robotic task. Forward invariance of subsets of the state space of the robots is turned into a control input constraint by using control barrier functions. The solution of the formulated optimization problem with energy constraints ensures that the resulting task is persistent. To illustrate the operation of the proposed framework, we consider two tasks whose persistent execution is particularly relevant: environment exploration and environment surveillance. We show the persistification of these two tasks both in simulation and on a team of wheeled mobile robots on the Robotarium.
A Study of a Class of Vibration-Driven Robots: Modeling, Analysis, Control and Design of the Brushbot
Mar 02, 2019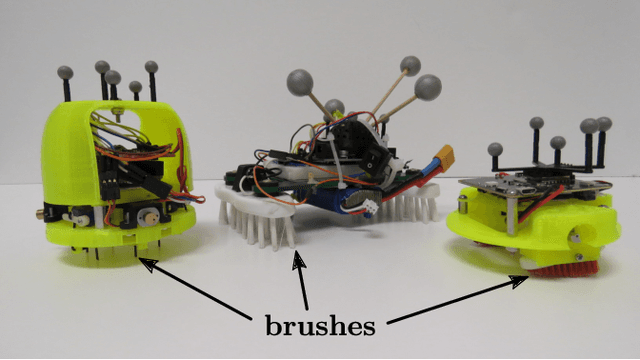

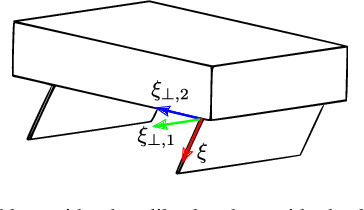
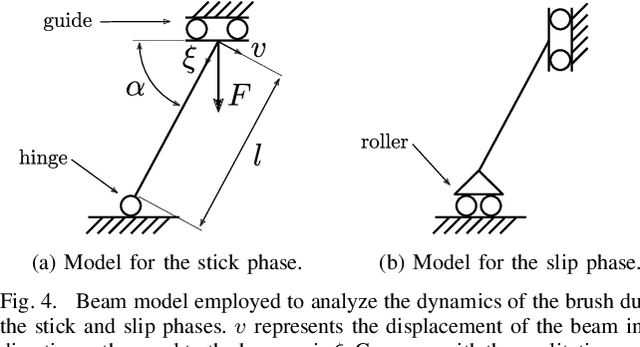
In this paper we present a study of a specific class of vibration-driven robots: the brushbots. In a bottom-up fashion, we start by deriving dynamic models of the brushes and we discuss the conditions under which these models can be employed to describe the motion of brushbots. Then, we present two designs of brushbots: a fully-actuated platform and a differential-drive-like one. The former is employed to experimentally validate both the developed theoretical models and the devised motion control algorithms. Finally, a coordinated-control algorithm is implemented on a swarm of differential-drive-like brushbots in order to demonstrate the design simplicity and robustness that can be achieved employing a vibration-based locomotion strategy.
Non-Uniform Robot Densities in Vibration Driven Swarms Using Phase Separation Theory
Mar 02, 2019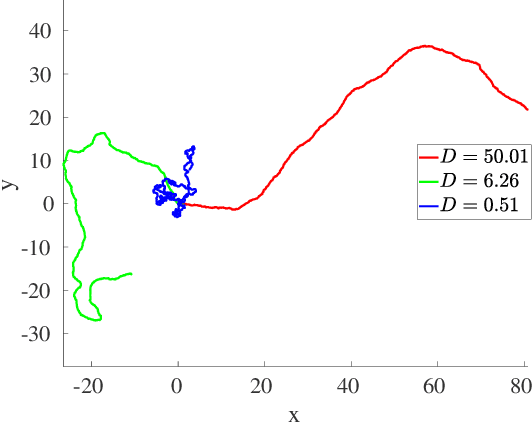
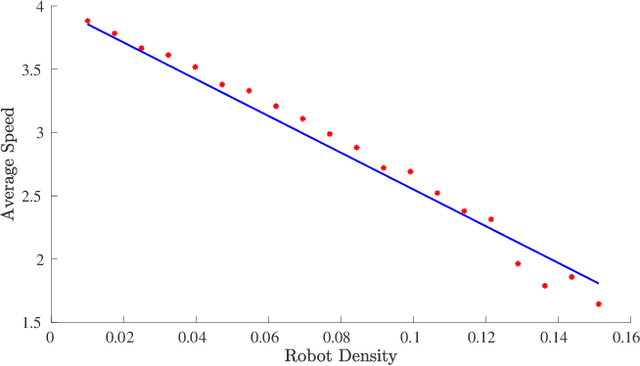
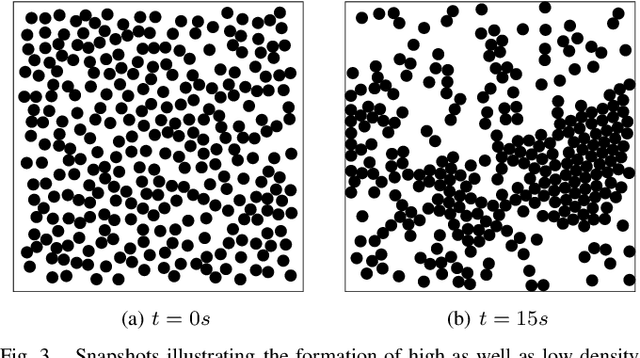
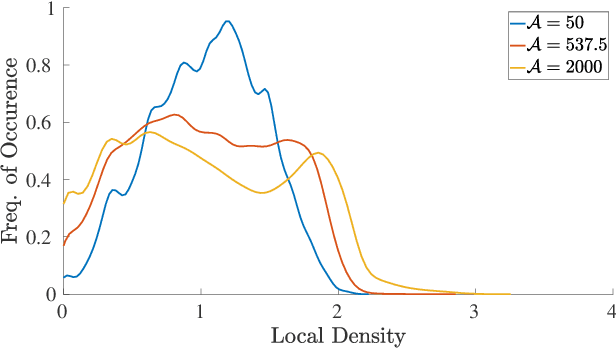
In robot swarms operating under highly restrictive sensing and communication constraints, individuals may need to use direct physical proximity to facilitate information exchange. However, in certain task-related scenarios, this requirement might conflict with the need for robots to spread out in the environment, e.g., for distributed sensing or surveillance applications. This paper demonstrates how a swarm of minimally-equipped robots can form high-density robot aggregates which coexist with lower robot densities in the domain. We envision a scenario where a swarm of vibration-driven robots---which sit atop bristles and achieve directed motion by vibrating them---move somewhat randomly in an environment while colliding with each other. Theoretical techniques from the study of far-from-equilibrium collectives and statistical mechanics clarify the mechanisms underlying the formation of these high and low density regions. Specifically, we capitalize on a transformation that connects the collective properties of a system of self-propelled particles with that of a well-studied molecular fluid system, thereby inheriting the rich theory of equilibrium thermodynamics. This connection is a formal one and is a relatively recent result in studies of motility induced phase separation; it is previously unexplored in the context of robotics. Real robot experiments as well as simulations illustrate how inter-robot collisions can precipitate the formation of non-uniform robot densities in a closed and bounded region.
Constraint-Driven Coordinated Control of Multi-Robot Systems
Nov 04, 2018
In this paper we present a reformulation--framed as a constrained optimization problem--of multi-robot tasks which are encoded through a cost function that is to be minimized. The advantages of this approach are multiple. The constraint-based formulation provides a natural way of enabling long-term robot autonomy applications, where resilience and adaptability to changing environmental conditions are essential. Moreover, under certain assumptions on the cost function, the resulting controller is guaranteed to be decentralized. Furthermore, finite-time convergence can be achieved, while using local information only, and therefore preserving the decentralized nature of the algorithm. The developed control framework has been tested on a team of ground mobile robots implementing long-term environmental monitoring.