 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStability Analysis and Design of Momentum-based Controllers for Humanoid Robots
Jul 16, 2017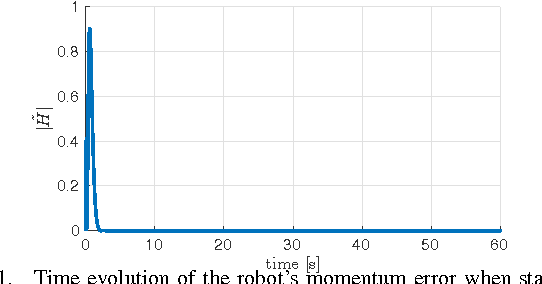
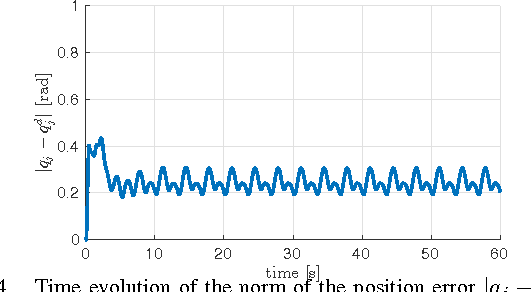
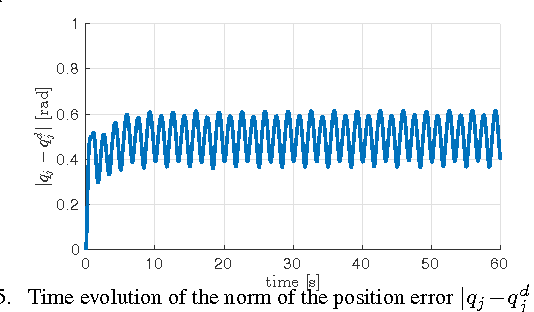
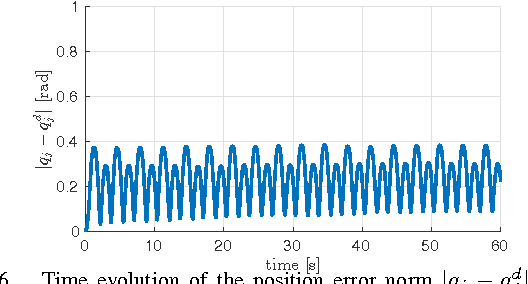
Envisioned applications for humanoid robots call for the design of balancing and walking controllers. While promising results have been recently achieved, robust and reliable controllers are still a challenge for the control community dealing with humanoid robotics. Momentum-based strategies have proven their effectiveness for controlling humanoids balancing, but the stability analysis of these controllers is still missing. The contribution of this paper is twofold. First, we numerically show that the application of state-of-the-art momentum-based control strategies may lead to unstable zero dynamics. Secondly, we propose simple modifications to the control architecture that avoid instabilities at the zero-dynamics level. Asymptotic stability of the closed loop system is shown by means of a Lyapunov analysis on the linearized system's joint space. The theoretical results are validated with both simulations and experiments on the iCub humanoid robot.
A Receding Horizon Push Recovery Strategy for Balancing the iCub Humanoid Robot
May 30, 2017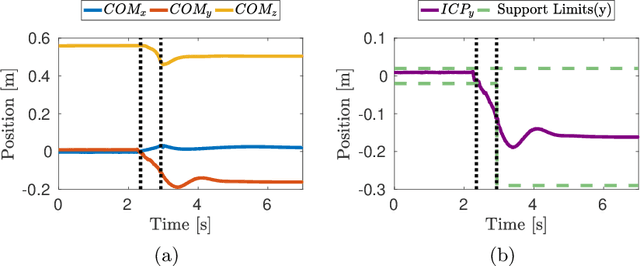
Balancing and reacting to strong and unexpected pushes is a critical requirement for humanoid robots. We recently designed a capture point based approach which interfaces with a momentum-based torque controller and we implemented and validated it on the iCub humanoid robot. In this work we implement a Receding Horizon control, also known as Model Predictive Control, to add the possibility to predict the future evolution of the robot, especially the constraints switching given by the hybrid nature of the system. We prove that the proposed MPC extension makes the step-recovery controller more robust and reliable when executing the recovery strategy. Experiments in simulation show the results of the proposed approach.
Torque-Controlled Stepping-Strategy Push Recovery: Design and Implementation on the iCub Humanoid Robot
May 30, 2017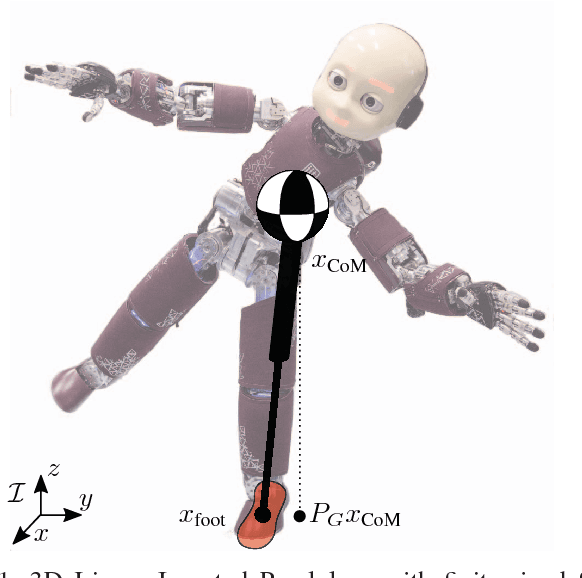
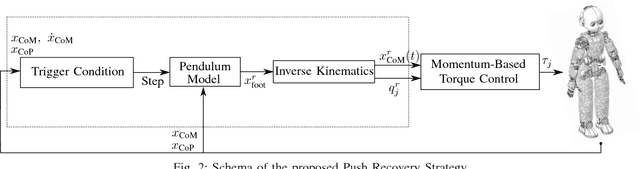
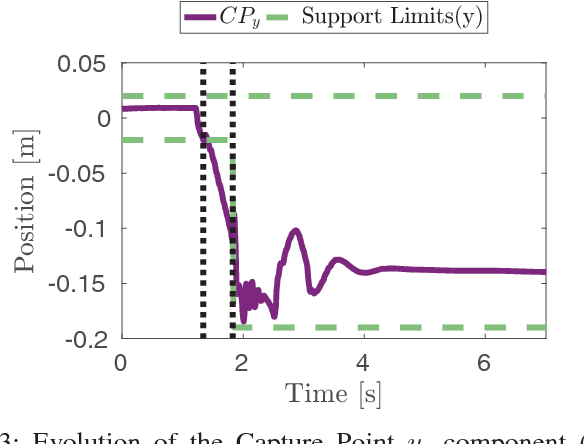
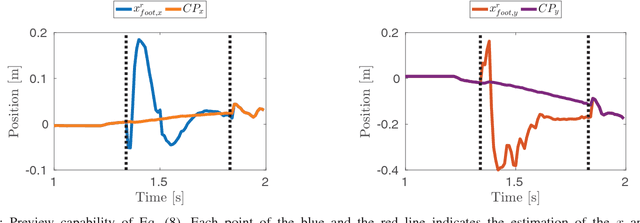
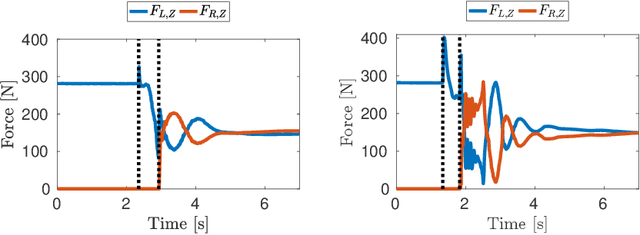
One of the challenges for the robotics community is to deploy robots which can reliably operate in real world scenarios together with humans. A crucial requirement for legged robots is the capability to properly balance on their feet, rejecting external disturbances. iCub is a state-of-the-art humanoid robot which has only recently started to balance on its feet. While the current balancing controller has proved successful in various scenarios, it still misses the capability to properly react to strong pushes by taking steps. This paper goes in this direction. It proposes and implements a control strategy based on the Capture Point concept [1]. Instead of relying on position control, like most of Capture Point related approaches, the proposed strategy generates references for the momentum-based torque controller already implemented on the iCub, thus extending its capabilities to react to external disturbances, while retaining the advantages of torque control when interacting with the environment. Experiments in the Gazebo simulator and on the iCub humanoid robot validate the proposed strategy.
The Static Center of Pressure Sensitivity: a further Criterion to assess Contact Stability and Balancing Controllers
May 29, 2017
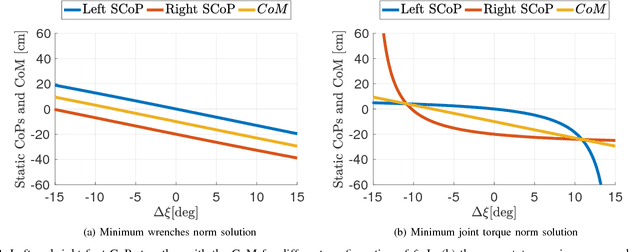
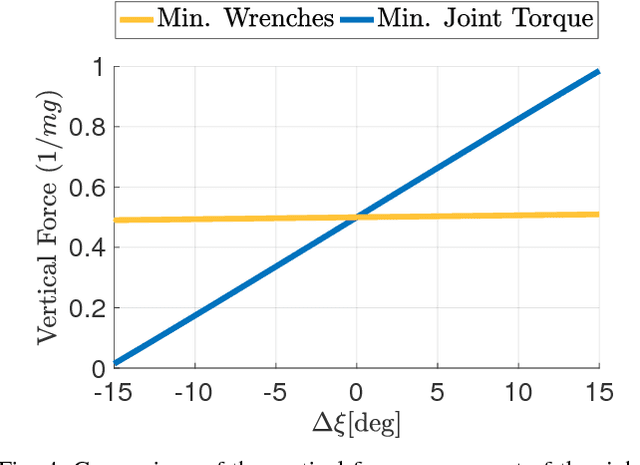
Legged locomotion has received increasing attention from the robotics community. In this respect, contact stability plays a critical role in ensuring that robots maintain balance, and it is a key element for balancing and walking controllers. The Center of Pressure is a contact stability criterion that defines a point that must be kept strictly inside the support polygon in order to ensure postural stability. In this paper, we introduce the concept of the sensitivity of the static center of pressure: roughly speaking, the rate of change of the center of pressure with respect to the system equilibrium configurations. This new concept can be used as an additional criterion to assess the robustness of the contact stability. We show how the sensitivity of the center of pressure can also be used as a metric to assess balancing controllers by considering two state-of-the-art control strategies. The analytical analysis is performed on a simplified model, and validated during balancing tasks on the iCub humanoid robot.
A Whole-Body Software Abstraction layer for Control Design of free-floating Mechanical Systems
Jan 04, 2017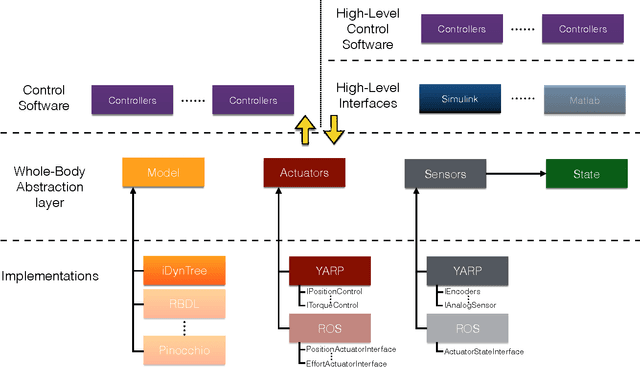
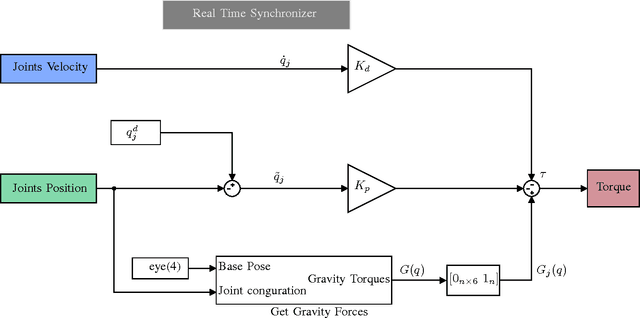
In this paper, we propose a software abstraction layer to simplify the design and synthesis of whole-body controllers without making any preliminary assumptions on the control law to be implemented. The main advantage of the proposed library is the decoupling of the control software from implementation details, which are related to the robotic platform. Furthermore, the resulting code is more clean and concise than ad-hoc code, as it focuses only on the implementation of the control law. In addition, we present a reference implementation of the abstraction layer together with a Simulink interface to provide support to Model-Driven based development. We also show the implementation of a simple proportional-derivative plus gravity compensation control together with a more complex momentum-based bipedal balance controller.
Prioritized Optimal Control
Oct 16, 2014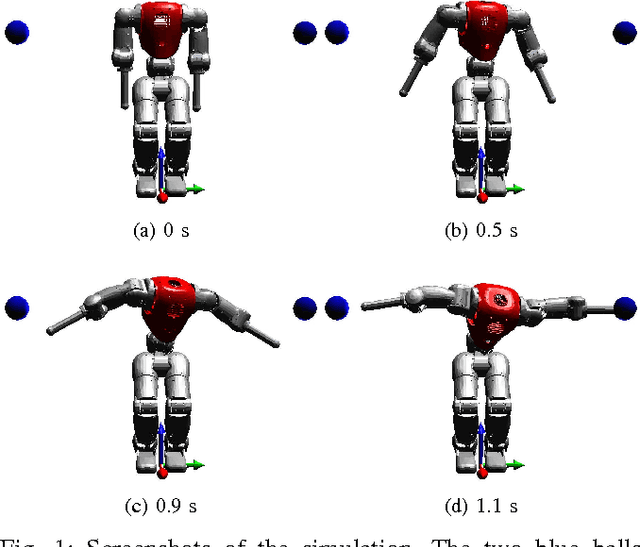
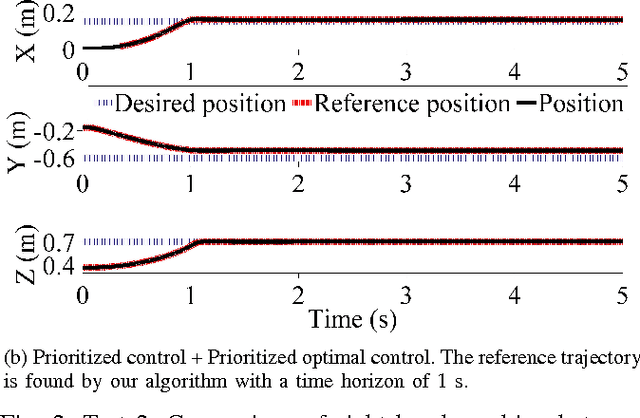
This paper presents a new technique to control highly redundant mechanical systems, such as humanoid robots. We take inspiration from two approaches. Prioritized control is a widespread multi-task technique in robotics and animation: tasks have strict priorities and they are satisfied only as long as they do not conflict with any higher-priority task. Optimal control instead formulates an optimization problem whose solution is either a feedback control policy or a feedforward trajectory of control inputs. We introduce strict priorities in multi-task optimal control problems, as an alternative to weighting task errors proportionally to their importance. This ensures the respect of the specified priorities, while avoiding numerical conditioning issues. We compared our approach with both prioritized control and optimal control with tests on a simulated robot with 11 degrees of freedom.