 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Arithmetic to Logic: The Resilience of Logic and Lookup-Based Neural Networks Under Parameter Bit-Flips
Mar 24, 2026The deployment of deep neural networks (DNNs) in safety-critical edge environments necessitates robustness against hardware-induced bit-flip errors. While empirical studies indicate that reducing numerical precision can improve fault tolerance, the theoretical basis of this phenomenon remains underexplored. In this work, we study resilience as a structural property of neural architectures rather than solely as a property of a dataset-specific trained solution. By deriving the expected squared error (MSE) under independent parameter bit flips across multiple numerical formats and layer primitives, we show that lower precision, higher sparsity, bounded activations, and shallow depth are consistently favored under this corruption model. We then argue that logic and lookup-based neural networks realize the joint limit of these design trends. Through ablation studies on the MLPerf Tiny benchmark suite, we show that the observed empirical trends are consistent with the theoretical predictions, and that LUT-based models remain highly stable in corruption regimes where standard floating-point models fail sharply. Furthermore, we identify a novel even-layer recovery effect unique to logic-based architectures and analyze the structural conditions under which it emerges. Overall, our results suggest that shifting from continuous arithmetic weights to discrete Boolean lookups can provide a favorable accuracy-resilience trade-off for hardware fault tolerance.
Differentiable Weightless Neural Networks
Oct 14, 2024We introduce the Differentiable Weightless Neural Network (DWN), a model based on interconnected lookup tables. Training of DWNs is enabled by a novel Extended Finite Difference technique for approximate differentiation of binary values. We propose Learnable Mapping, Learnable Reduction, and Spectral Regularization to further improve the accuracy and efficiency of these models. We evaluate DWNs in three edge computing contexts: (1) an FPGA-based hardware accelerator, where they demonstrate superior latency, throughput, energy efficiency, and model area compared to state-of-the-art solutions, (2) a low-power microcontroller, where they achieve preferable accuracy to XGBoost while subject to stringent memory constraints, and (3) ultra-low-cost chips, where they consistently outperform small models in both accuracy and projected hardware area. DWNs also compare favorably against leading approaches for tabular datasets, with higher average rank. Overall, our work positions DWNs as a pioneering solution for edge-compatible high-throughput neural networks.
What is the Best Grid-Map for Self-Driving Cars Localization? An Evaluation under Diverse Types of Illumination, Traffic, and Environment
Sep 19, 2020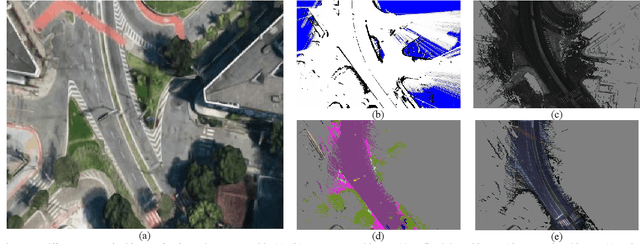
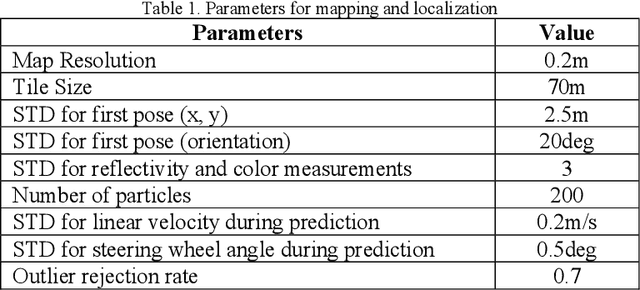
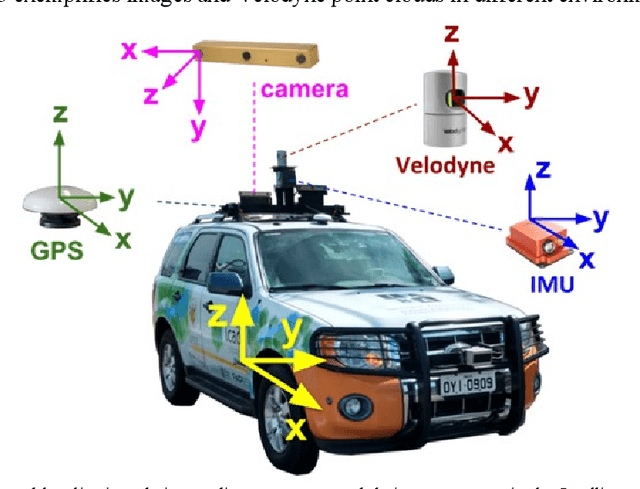
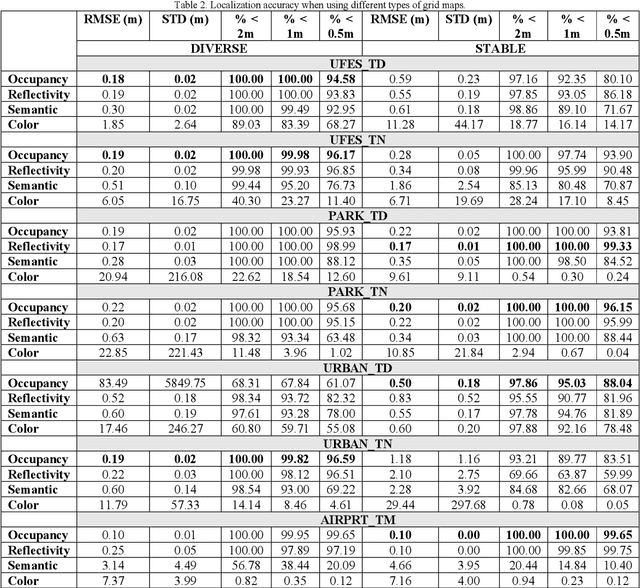
The localization of self-driving cars is needed for several tasks such as keeping maps updated, tracking objects, and planning. Localization algorithms often take advantage of maps for estimating the car pose. Since maintaining and using several maps is computationally expensive, it is important to analyze which type of map is more adequate for each application. In this work, we provide data for such analysis by comparing the accuracy of a particle filter localization when using occupancy, reflectivity, color, or semantic grid maps. To the best of our knowledge, such evaluation is missing in the literature. For building semantic and colour grid maps, point clouds from a Light Detection and Ranging (LiDAR) sensor are fused with images captured by a front-facing camera. Semantic information is extracted from images with a deep neural network. Experiments are performed in varied environments, under diverse conditions of illumination and traffic. Results show that occupancy grid maps lead to more accurate localization, followed by reflectivity grid maps. In most scenarios, the localization with semantic grid maps kept the position tracking without catastrophic losses, but with errors from 2 to 3 times bigger than the previous. Colour grid maps led to inaccurate and unstable localization even using a robust metric, the entropy correlation coefficient, for comparing online data and the map.