 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRethinking the Role of Collaborative Robots in Rehabilitation
Mar 05, 2026Current research on collaborative robots (cobots) in physical rehabilitation largely focuses on repeated motion training for people undergoing physical therapy (PuPT), even though these sessions include phases that could benefit from robotic collaboration and assistance. Meanwhile, access to physical therapy remains limited for people with disabilities and chronic illnesses. Cobots could support both PuPT and therapists, and improve access to therapy, yet their broader potential remains underexplored. We propose extending the scope of cobots by imagining their role in assisting therapists and PuPT before, during, and after a therapy session. We discuss how cobot assistance may lift access barriers by promoting ability-based therapy design and helping therapists manage their time and effort. Finally, we highlight challenges to realizing these roles, including advancing user-state understanding, ensuring safety, and integrating cobots into therapists' workflow. This view opens new research questions and opportunities to draw from the HRI community's advances in assistive robotics.
Giving Sense to Inputs: Toward an Accessible Control Framework for Shared Autonomy
Jan 28, 2025While shared autonomy offers significant potential for assistive robotics, key questions remain about how to effectively map 2D control inputs to 6D robot motions. An intuitive framework should allow users to input commands effortlessly, with the robot responding as expected, without users needing to anticipate the impact of their inputs. In this article, we propose a dynamic input mapping framework that links joystick movements to motions on control frames defined along a trajectory encoded with canal surfaces. We evaluate our method in a user study with 20 participants, demonstrating that our input mapping framework reduces the workload and improves usability compared to a baseline mapping with similar motion encoding. To prepare for deployment in assistive scenarios, we built on the development from the accessible gaming community to select an accessible control interface. We then tested the system in an exploratory study, where three wheelchair users controlled the robot for both daily living activities and a creative painting task, demonstrating its feasibility for users closer to our target population.
GeoSACS: Geometric Shared Autonomy via Canal Surfaces
Apr 15, 2024We introduce GeoSACS, a geometric framework for shared autonomy (SA). In variable environments, SA methods can be used to combine robotic capabilities with real-time human input in a way that offloads the physical task from the human. To remain intuitive, it can be helpful to simplify requirements for human input (i.e., reduce the dimensionality), which create challenges for to map low-dimensional human inputs to the higher dimensional control space of robots without requiring large amounts of data. We built GeoSACS on canal surfaces, a geometric framework that represents potential robot trajectories as a canal from as few as two demonstrations. GeoSACS maps user corrections on the cross-sections of this canal to provide an efficient SA framework. We extend canal surfaces to consider orientation and update the control frames to support intuitive mapping from user input to robot motions. Finally, we demonstrate GeoSACS in two preliminary studies, including a complex manipulation task where a robot loads laundry into a washer.
Factors that Affect Personalization of Robots for Older Adults
Feb 27, 2024

We introduce a taxonomy of important factors to consider when designing interactions with an assistive robot in a senior living facility. These factors are derived from our reflection on two field studies and are grouped into the following high-level categories: primary user (residents), care partners, robot, facility and external circumstances. We outline how multiple factors in these categories impact different aspects of personalization, such as adjusting interactions based on the unique needs of a resident or modifying alerts about the robot's status for different care partners. This preliminary taxonomy serves as a framework for considering how to deploy personalized assistive robots in the complex caregiving ecosystem.
A System for Human-Robot Teaming through End-User Programming and Shared Autonomy
Jan 22, 2024



Many industrial tasks-such as sanding, installing fasteners, and wire harnessing-are difficult to automate due to task complexity and variability. We instead investigate deploying robots in an assistive role for these tasks, where the robot assumes the physical task burden and the skilled worker provides both the high-level task planning and low-level feedback necessary to effectively complete the task. In this article, we describe the development of a system for flexible human-robot teaming that combines state-of-the-art methods in end-user programming and shared autonomy and its implementation in sanding applications. We demonstrate the use of the system in two types of sanding tasks, situated in aircraft manufacturing, that highlight two potential workflows within the human-robot teaming setup. We conclude by discussing challenges and opportunities in human-robot teaming identified during the development, application, and demonstration of our system.
Periscope: A Robotic Camera System to Support Remote Physical Collaboration
May 12, 2023We investigate how robotic camera systems can offer new capabilities to computer-supported cooperative work through the design, development, and evaluation of a prototype system called Periscope. With Periscope, a local worker completes manipulation tasks with guidance from a remote helper who observes the workspace through a camera mounted on a semi-autonomous robotic arm that is co-located with the worker. Our key insight is that the helper, the worker, and the robot should all share responsibility of the camera view-an approach we call shared camera control. Using this approach, we present a set of modes that distribute the control of the camera between the human collaborators and the autonomous robot depending on task needs. We demonstrate the system's utility and the promise of shared camera control through a preliminary study where 12 dyads collaboratively worked on assembly tasks and discuss design and research implications of our work for future robotic camera system that facilitate remote collaboration.
Coordinated Multi-Robot Shared Autonomy Based on Scheduling and Demonstrations
Mar 28, 2023Shared autonomy methods, where a human operator and a robot arm work together, have enabled robots to complete a range of complex and highly variable tasks. Existing work primarily focuses on one human sharing autonomy with a single robot. By contrast, in this paper we present an approach for multi-robot shared autonomy that enables one operator to provide real-time corrections across two coordinated robots completing the same task in parallel. Sharing autonomy with multiple robots presents fundamental challenges. The human can only correct one robot at a time, and without coordination, the human may be left idle for long periods of time. Accordingly, we develop an approach that aligns the robot's learned motions to best utilize the human's expertise. Our key idea is to leverage Learning from Demonstration (LfD) and time warping to schedule the motions of the robots based on when they may require assistance. Our method uses variability in operator demonstrations to identify the types of corrections an operator might apply during shared autonomy, leverages flexibility in how quickly the task was performed in demonstrations to aid in scheduling, and iteratively estimates the likelihood of when corrections may be needed to ensure that only one robot is completing an action requiring assistance. Through a preliminary simulated study, we show that our method can decrease the overall time spent sanding by iteratively estimating the times when each robot could need assistance and generating an optimized schedule that allows the operator to provide corrections to each robot during these times.
Situated Participatory Design: A Method for In Situ Design of Robotic Interaction with Older Adults
Feb 06, 2023



We present a participatory design method to design human-robot interactions with older adults and its application through a case study of designing an assistive robot for a senior living facility. The method, called Situated Participatory Design (sPD), was designed considering the challenges of working with older adults and involves three phases that enable designing and testing use scenarios through realistic, iterative interactions with the robot. In design sessions with nine residents and three caregivers, we uncovered a number of insights about sPD that help us understand its benefits and limitations. For example, we observed how designs evolved through iterative interactions and how early exposure to the robot helped participants consider using the robot in their daily life. With sPD, we aim to help future researchers to increase and deepen the participation of older adults in designing assistive technologies.
Proceedings of the AI-HRI Symposium at AAAI-FSS 2022
Sep 28, 2022The Artificial Intelligence (AI) for Human-Robot Interaction (HRI) Symposium has been a successful venue of discussion and collaboration on AI theory and methods aimed at HRI since 2014. This year, after a review of the achievements of the AI-HRI community over the last decade in 2021, we are focusing on a visionary theme: exploring the future of AI-HRI. Accordingly, we added a Blue Sky Ideas track to foster a forward-thinking discussion on future research at the intersection of AI and HRI. As always, we appreciate all contributions related to any topic on AI/HRI and welcome new researchers who wish to take part in this growing community. With the success of past symposia, AI-HRI impacts a variety of communities and problems, and has pioneered the discussions in recent trends and interests. This year's AI-HRI Fall Symposium aims to bring together researchers and practitioners from around the globe, representing a number of university, government, and industry laboratories. In doing so, we hope to accelerate research in the field, support technology transition and user adoption, and determine future directions for our group and our research.
A Method For Automated Drone Viewpoints to Support Remote Robot Manipulation
Aug 08, 2022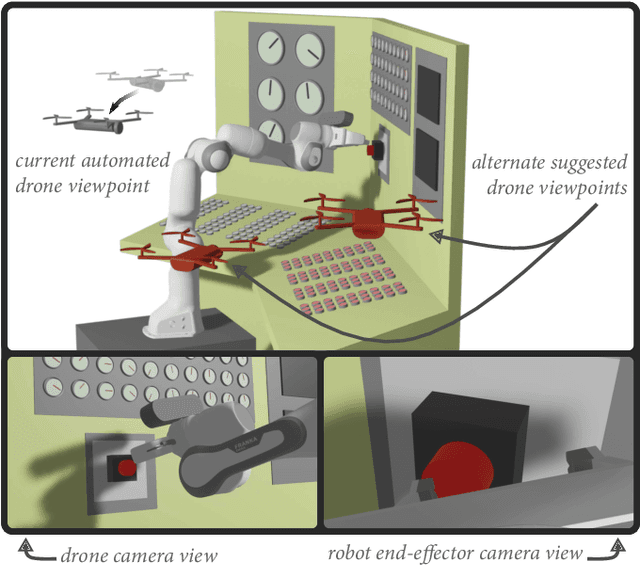
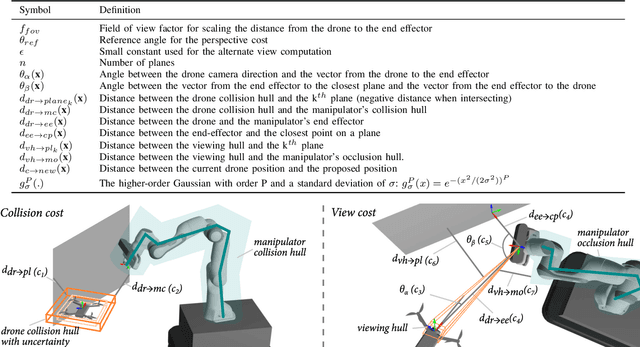
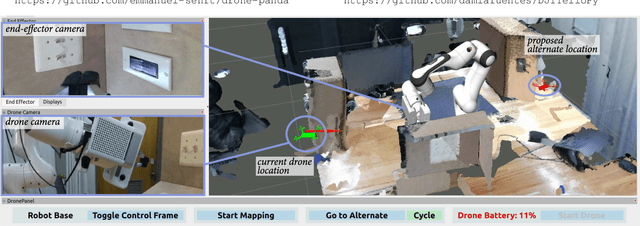
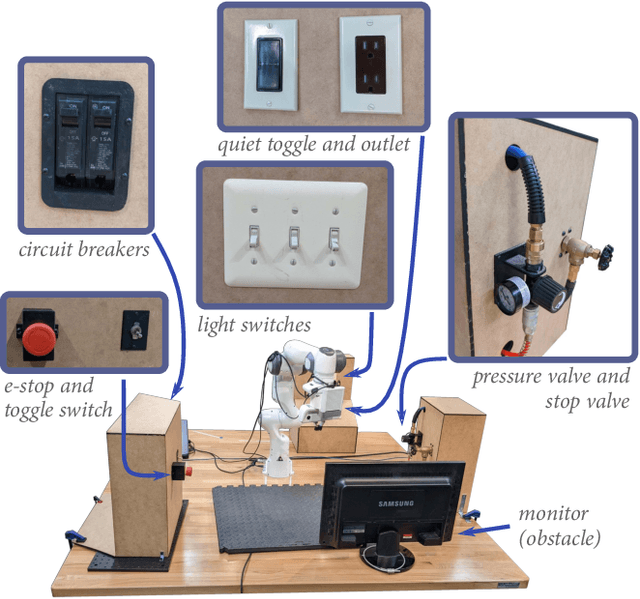
Drones can provide a minimally-constrained adapting camera view to support robot telemanipulation. Furthermore, the drone view can be automated to reduce the burden on the operator during teleoperation. However, existing approaches do not focus on two important aspects of using a drone as an automated view provider. The first is how the drone should select from a range of quality viewpoints within the workspace (e.g., opposite sides of an object). The second is how to compensate for unavoidable drone pose uncertainty in determining the viewpoint. In this paper, we provide a nonlinear optimization method that yields effective and adaptive drone viewpoints for telemanipulation with an articulated manipulator. Our first key idea is to use sparse human-in-the-loop input to toggle between multiple automatically-generated drone viewpoints. Our second key idea is to introduce optimization objectives that maintain a view of the manipulator while considering drone uncertainty and the impact on viewpoint occlusion and environment collisions. We provide an instantiation of our drone viewpoint method within a drone-manipulator remote teleoperation system. Finally, we provide an initial validation of our method in tasks where we complete common household and industrial manipulations.