 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTerradynamics and design of tip-extending robotic anchors
Nov 14, 2025Most engineered pilings require substantially more force to be driven into the ground than they can resist during extraction. This requires relatively heavy equipment for insertion, which is problematic for anchoring in hard-to-access sites, including in extraterrestrial locations. In contrast, for tree roots, the external reaction force required to extract is much greater than required to insert--little more than the weight of the seed initiates insertion. This is partly due to the mechanism by which roots insert into the ground: tip extension. Proof-of-concept robotic prototypes have shown the benefits of using this mechanism, but a rigorous understanding of the underlying granular mechanics and how they inform the design of a robotic anchor is lacking. Here, we study the terradynamics of tip-extending anchors compared to traditional piling-like intruders, develop a set of design insights, and apply these to create a deployable robotic anchor. Specifically, we identify that to increase an anchor's ratio of extraction force to insertion force, it should: (i) extend beyond a critical depth; (ii) include hair-like protrusions; (iii) extend near-vertically, and (iv) incorporate multiple smaller anchors rather than a single large anchor. Synthesizing these insights, we developed a lightweight, soft robotic, root-inspired anchoring device that inserts into the ground with a reaction force less than its weight. We demonstrate that the 300 g device can deploy a series of temperature sensors 45 cm deep into loose Martian regolith simulant while anchoring with an average of 120 N, resulting in an anchoring-to-weight ratio of 40:1.
DisCo: Distributed Contact-Rich Trajectory Optimization for Forceful Multi-Robot Collaboration
Oct 30, 2024



We present DisCo, a distributed algorithm for contact-rich, multi-robot tasks. DisCo is a distributed contact-implicit trajectory optimization algorithm, which allows a group of robots to optimize a time sequence of forces to objects and to their environment to accomplish tasks such as collaborative manipulation, robot team sports, and modular robot locomotion. We build our algorithm on a variant of the Alternating Direction Method of Multipliers (ADMM), where each robot computes its own contact forces and contact-switching events from a smaller single-robot, contact-implicit trajectory optimization problem, while cooperating with other robots through dual variables, enforcing constraints between robots. Each robot iterates between solving its local problem, and communicating over a wireless mesh network to enforce these consistency constraints with its neighbors, ultimately converging to a coordinated plan for the group. The local problems solved by each robot are significantly less challenging than a centralized problem with all robots' contact forces and switching events, improving the computational efficiency, while also preserving the privacy of some aspects of each robot's operation. We demonstrate the effectiveness of our algorithm in simulations of collaborative manipulation, multi-robot team sports scenarios, and in modular robot locomotion, where DisCo achieves $3$x higher success rates with a 2.5x to 5x faster computation time. Further, we provide results of hardware experiments on a modular truss robot, with three collaborating truss nodes planning individually while working together to produce a punctuated rolling-gate motion of the composite structure. Videos are available on the project page: https://disco-opt.github.io.
Development and Testing of a Vine Robot for Urban Search and Rescue in Confined Rubble Environments
Sep 16, 2024



The request for fast response and safe operation after natural and man-made disasters in urban environments has spurred the development of robotic systems designed to assist in search and rescue operations within complex rubble sites. Traditional Unmanned Aerial Vehicles (UAVs) and Unmanned Ground Vehicles (UGVs) face significant limitations in such confined and obstructed environments. This paper introduces a novel vine robot designed to navigate dense rubble, drawing inspiration from natural growth mechanisms found in plants. Unlike conventional robots, vine robots are soft robots that can grow by everting their material, allowing them to navigate through narrow spaces and obstacles. The prototype presented in this study incorporates pneumatic muscles for steering and oscillation, an equation-based robot length control plus feedback pressure regulating system for extending and retracting the robot body. We conducted a series of controlled experiments in an artificial rubble testbed to assess the robot performance under varying environmental conditions and robot parameters, including volume ratio, environmental weight, oscillation, and steering. The results show that the vine robot can achieve significant penetration depths in cluttered environments with mixed obstacle sizes and weights, and can maintain repeated trajectories, demonstrating potential for mapping and navigating complex underground paths. Our findings highlight the suitability of the vine robot for urban search and rescue missions, with further research planned to enhance its robustness and deployability in real-world scenarios.
High-curvature, high-force, vine robot for inspection
Oct 02, 2023



Robot performance has advanced considerably both in and out of the factory, however in tightly constrained, unknown environments such as inside a jet engine or the human heart, current robots are less adept. In such cases where a borescope or endoscope can't reach, disassembly or surgery are costly. One promising inspection device inspired by plant growth are "vine robots" that can navigate cluttered environments by extending from their tip. Yet, these vine robots are currently limited in their ability to simultaneously steer into tight curvatures and apply substantial forces to the environment. Here, we propose a plant-inspired method of steering by asymmetrically lengthening one side of the vine robot to enable high curvature and large force application. Our key development is the introduction of an extremely anisotropic, composite, wrinkled film with elastic moduli 400x different in orthogonal directions. The film is used as the vine robot body, oriented such that it can stretch over 120% axially, but only 3% circumferentially. With the addition of controlled layer jamming, this film enables a steering method inspired by plants in which the circumference of the robot is inextensible, but the sides can stretch to allow turns. This steering method and body pressure do not work against each other, allowing the robot to exhibit higher forces and tighter curvatures than previous vine robot architectures. This work advances the abilities of vine robots--and robots more generally--to not only access tightly constrained environments, but perform useful work once accessed.
Thermotropic Vine-inspired Robots
Jan 18, 2023



Soft and bio-inspired robotics promise to imbue robots with capabilities found in the natural world.However, many of these biological capabilities are yet to be realized. For example, current vine- and root-inspired everting robots rely on centralized control outside of the robotic tendril to process sensor information and command actuation. In contrast, roots in nature control growth direction in a distributed manner, with all control, sensing, and actuation local. Such distributed control is useful for robustness and parallelization particularly while the plants search for resources (light, water, favorable soil, etc.). Here we present an approach for exploiting these biological behaviors via a thermotropic vine-inspired robot; the device uses local, material-level sensing, actuation, and control embedded in its skin to grow toward a source of heat. We present basic modeling of the concept, design details, and experimental results showing its behavior in varied heat fields. Our simple device advances vine-inspired everting robots by offering a new, distributed method of shape control, and could lead to eventual applications such as highly parallelized robots for fire-fighting or search-and-rescue operations.
A peristaltic soft, wearable robot for compression and massage therapy
Jun 02, 2022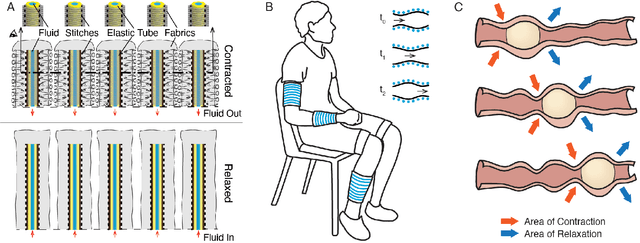
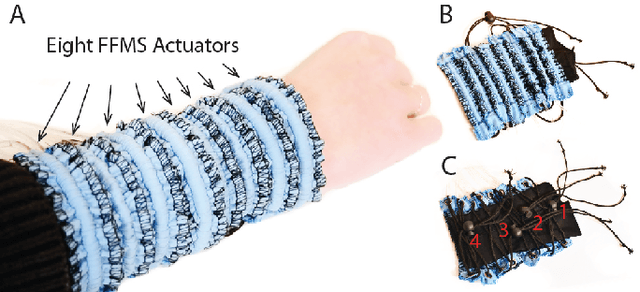
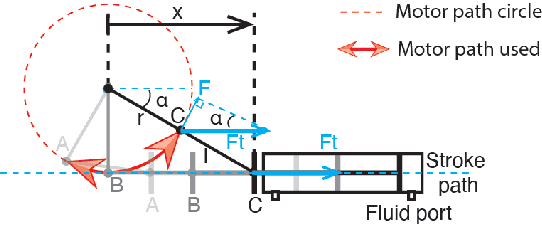
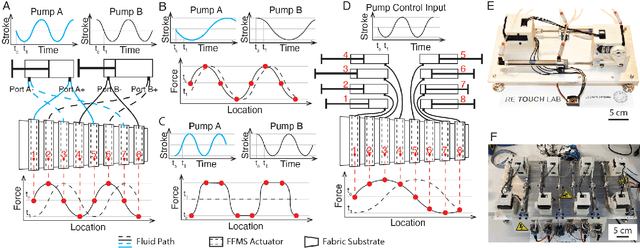
Soft robotics is attractive for wearable applications that require conformal interactions with the human body. Soft wearable robotic garments hold promise for supplying dynamic compression or massage therapies, such as are applied for disorders affecting lymphatic and blood circulation. In this paper, we present a wearable robot capable of supplying dynamic compression and massage therapy via peristaltic motion of finger-sized soft, fluidic actuators. We show that this peristaltic wearable robot can supply dynamic compression pressures exceeding 22 kPa at frequencies of 14 Hz or more, meeting requirements for compression and massage therapy. A large variety of software-programmable compression wave patterns can be generated by varying frequency, amplitude, phase delay, and duration parameters. We first demonstrate the utility of this peristaltic wearable robot for compression therapy, showing fluid transport in a laboratory model of the upper limb. We theoretically and empirically identify driving regimes that optimize fluid transport. We second demonstrate the utility of this garment for dynamic massage therapy. These findings show the potential of such a wearable robot for the treatment of several health disorders associated with lymphatic and blood circulation, such as lymphedema and blood clots.
Shared-Control Teleoperation Paradigms on a Soft Growing Robot Manipulator
Aug 02, 2021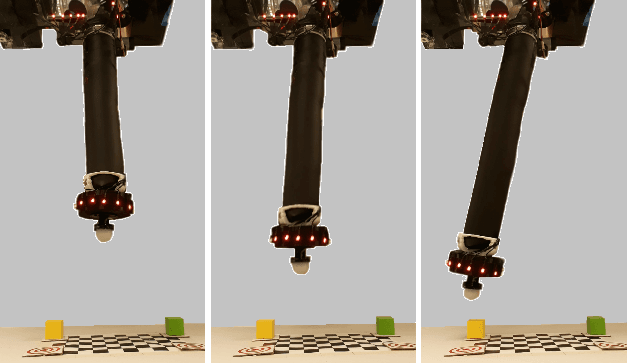
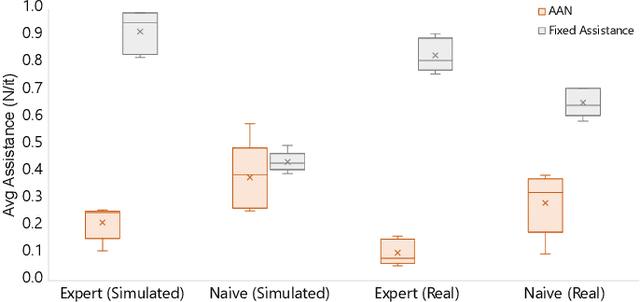
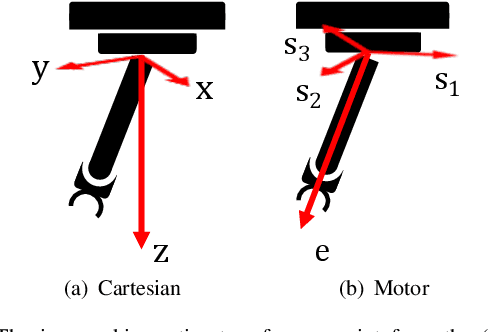
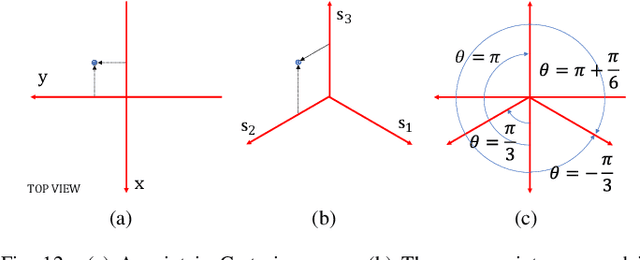
Semi-autonomous telerobotic systems allow both humans and robots to exploit their strengths, while enabling personalized execution of a task. However, for new soft robots with degrees of freedom dissimilar to those of human operators, it is unknown how the control of a task should be divided between the human and robot. This work presents a set of interaction paradigms between a human and a soft growing robot manipulator, and demonstrates them in both real and simulated scenarios. The robot can grow and retract by eversion and inversion of its tubular body, a property we exploit to implement interaction paradigms. We implemented and tested six different paradigms of human-robot interaction, beginning with full teleoperation and gradually adding automation to various aspects of the task execution. All paradigms were demonstrated by two expert and two naive operators. Results show that humans and the soft robot manipulator can split control along degrees of freedom while acting simultaneously. In the simple pick-and-place task studied in this work, performance improves as the control is gradually given to the robot, because the robot can correct certain human errors. However, human engagement and enjoyment may be maximized when the task is at least partially shared. Finally, when the human operator is assisted by haptic feedback based on soft robot position errors, we observed that the improvement in performance is highly dependent on the expertise of the human operator.
Thermodynamically-informed Air-based Soft Heat Engine Design
Mar 25, 2021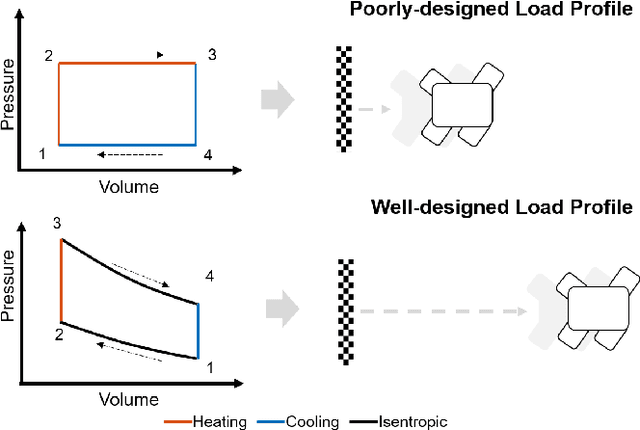
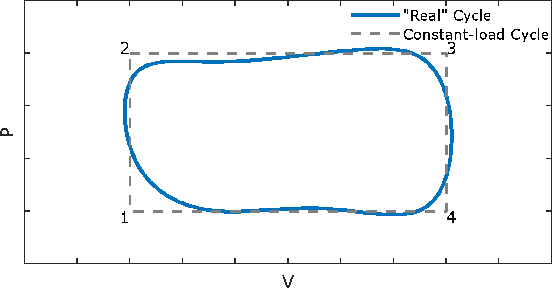
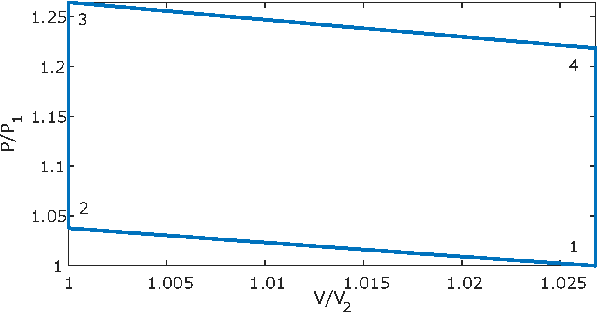
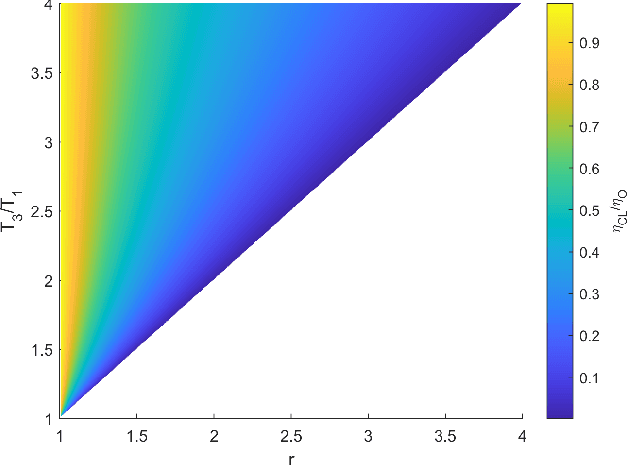
Soft heat engines are poised to play a vital role in future soft robots due to their easy integration into soft structures and low-voltage power requirements. Recent works have demonstrated soft heat engines relying on liquid-to-gas phase change materials. However, despite the fact that many soft robots have air as a primary component, soft air cycles are not a focus of the field. In this paper, we develop theory for air-based soft heat engines design and efficiency, and demonstrate experimentally that efficiency can be improved through careful cycle design. We compare a simple constant-load cycle to a designed decreasing-load cycle, inspired by the Otto cycle. While both efficiencies are relatively low, the Otto-like cycle improves efficiency by a factor of 11.3, demonstrating the promise of this approach. Our results lay the foundation for the development of air-based soft heat engines as a new option for powering soft robots.
Modeling, Reduction, and Control of a Helically Actuated Inertial Soft Robotic Arm via the Koopman Operator
Nov 16, 2020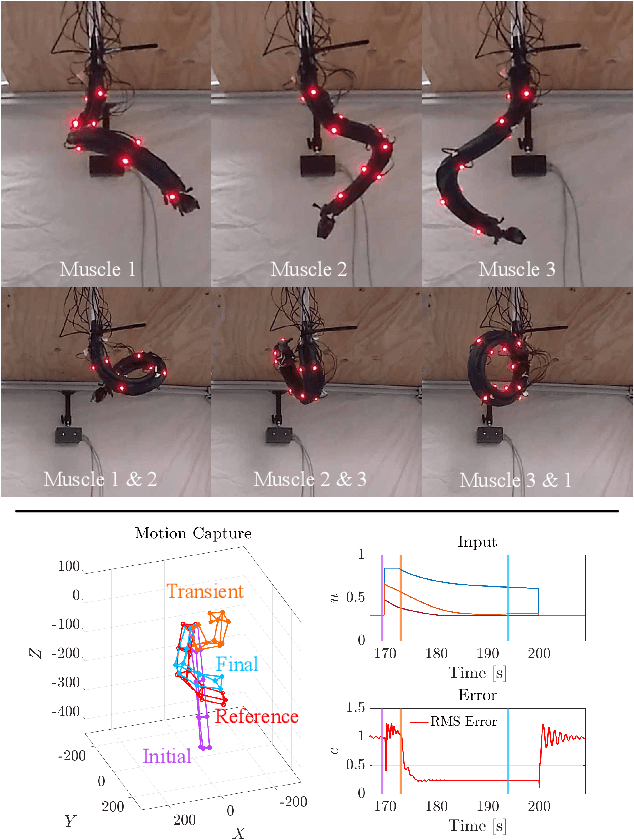
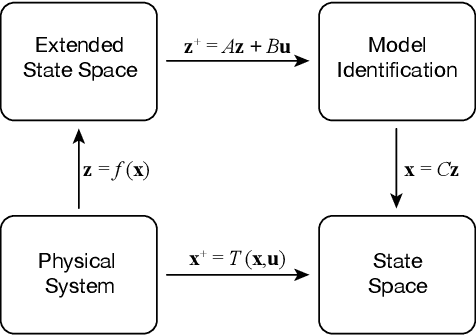
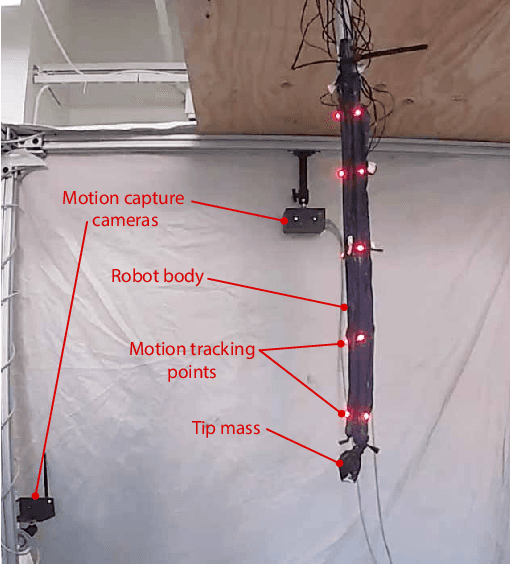
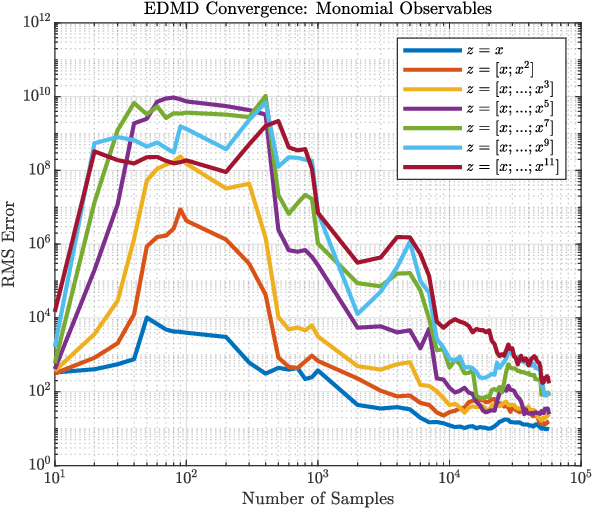
Soft robots promise improved safety and capability over rigid robots when deployed in complex, delicate, and dynamic environments. However, the infinite degrees of freedom and highly nonlinear dynamics of these systems severely complicate their modeling and control. As a step toward addressing this open challenge, we apply the data-driven, Hankel Dynamic Mode Decomposition (HDMD) with time delay observables to the model identification of a highly inertial, helical soft robotic arm with a high number of underactuated degrees of freedom. The resulting model is linear and hence amenable to control via a Linear Quadratic Regulator (LQR). Using our test bed device, a dynamic, lightweight pneumatic fabric arm with an inertial mass at the tip, we show that the combination of HDMD and LQR allows us to command our robot to achieve arbitrary poses using only open loop control. We further show that Koopman spectral analysis gives us a dimensionally reduced basis of modes which decreases computational complexity without sacrificing predictive power.
Geometric Solutions for General Actuator Routing on Inflated-Beam Soft Growing Robots
Jun 10, 2020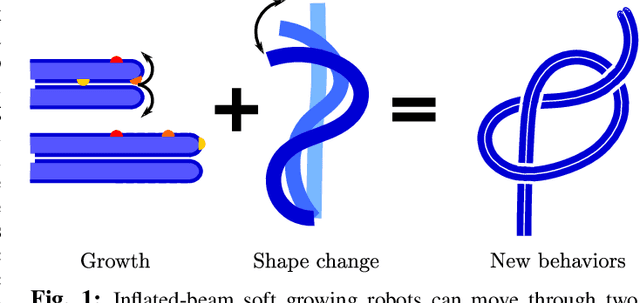
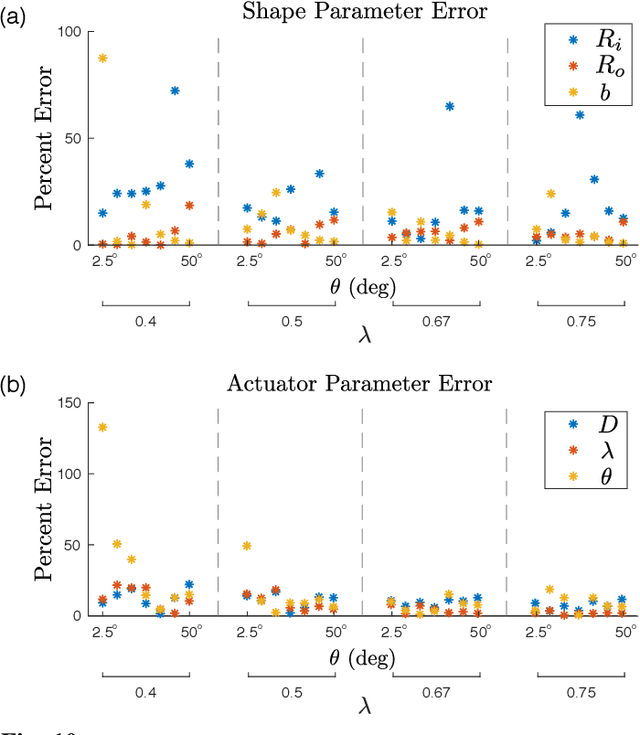
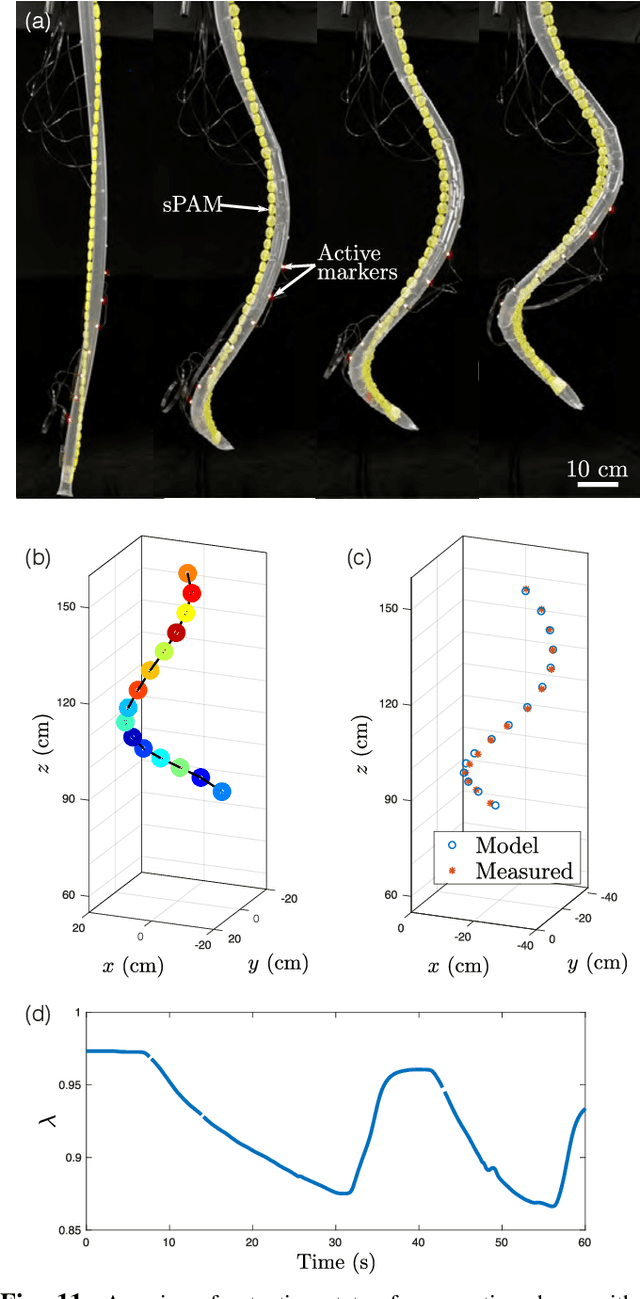
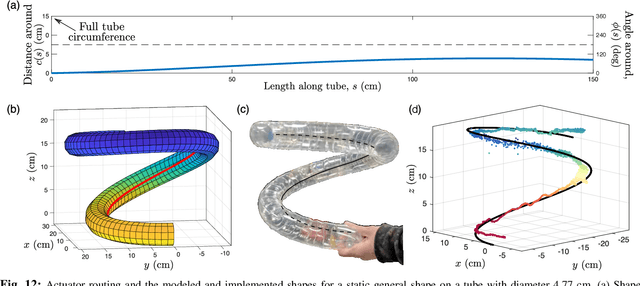
Continuum and soft robots can leverage complex actuator shapes to take on useful shapes while actuating only a few of their many degrees of freedom. Continuum robots that also grow increase the range of potential shapes that can be actuated and enable easier access to constrained environments. Existing models for describing the complex kinematics involved in general actuation of continuum robots rely on simulation or well-behaved stress-strain relationships, but the non-linear behavior of the thin-walled inflated-beams used in growing robots makes these techniques difficult to apply. Here we derive kinematic models of single, generally routed tendon paths on a soft pneumatic backbone of inextensible but flexible material from geometric relationships alone. This allows for forward modeling of the resulting shapes with only knowledge of the geometry of the system. We show that this model can accurately predict the shape of the whole robot body and how the model changes with actuation type. We also demonstrate the use of this kinematic model for inverse design, where actuator designs are found based on desired final robot shapes. We deploy these designed actuators on soft pneumatic growing robots to show the benefits of simultaneous growth and shape change.