 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeParallel Simulation of Contact and Actuation for Soft Growing Robots
Sep 18, 2025Soft growing robots, commonly referred to as vine robots, have demonstrated remarkable ability to interact safely and robustly with unstructured and dynamic environments. It is therefore natural to exploit contact with the environment for planning and design optimization tasks. Previous research has focused on planning under contact for passively deforming robots with pre-formed bends. However, adding active steering to these soft growing robots is necessary for successful navigation in more complex environments. To this end, we develop a unified modeling framework that integrates vine robot growth, bending, actuation, and obstacle contact. We extend the beam moment model to include the effects of actuation on kinematics under growth and then use these models to develop a fast parallel simulation framework. We validate our model and simulator with real robot experiments. To showcase the capabilities of our framework, we apply our model in a design optimization task to find designs for vine robots navigating through cluttered environments, identifying designs that minimize the number of required actuators by exploiting environmental contacts. We show the robustness of the designs to environmental and manufacturing uncertainties. Finally, we fabricate an optimized design and successfully deploy it in an obstacle-rich environment.
Deployment of Objects with a Soft Everting Robot
Jul 29, 2025Soft everting robots present significant advantages over traditional rigid robots, including enhanced dexterity, improved environmental interaction, and safe navigation in unpredictable environments. While soft everting robots have been widely demonstrated for exploration type tasks, their potential to move and deploy payloads in such tasks has been less investigated, with previous work focusing on sensors and tools for the robot. Leveraging the navigation capabilities, and deployed body, of the soft everting robot to deliver payloads in hazardous areas, e.g. carrying a water bottle to a person stuck under debris, would represent a significant capability in many applications. In this work, we present an analysis of how soft everting robots can be used to deploy larger, heavier payloads through the inside of the robot. We analyze both what objects can be deployed and what terrain features they can be carried through. Building on existing models, we present methods to quantify the effects of payloads on robot growth and self-support, and develop a model to predict payload slip. We then experimentally quantify payload transport using soft everting robot with a variety of payload shapes, sizes, and weights and though a series of tasks: steering, vertical transport, movement through holes, and movement across gaps. Overall, the results show that we can transport payloads in a variety of shapes and up to 1.5kg in weight and that we can move through circular apertures with as little as 0.01cm clearance around payloads, carry out discrete turns up to 135 degrees, and move across unsupported gaps of 1.15m in length.
A Modular Haptic Display with Reconfigurable Signals for Personalized Information Transfer
Jun 06, 2025We present a customizable soft haptic system that integrates modular hardware with an information-theoretic algorithm to personalize feedback for different users and tasks. Our platform features modular, multi-degree-of-freedom pneumatic displays, where different signal types, such as pressure, frequency, and contact area, can be activated or combined using fluidic logic circuits. These circuits simplify control by reducing reliance on specialized electronics and enabling coordinated actuation of multiple haptic elements through a compact set of inputs. Our approach allows rapid reconfiguration of haptic signal rendering through hardware-level logic switching without rewriting code. Personalization of the haptic interface is achieved through the combination of modular hardware and software-driven signal selection. To determine which display configurations will be most effective, we model haptic communication as a signal transmission problem, where an agent must convey latent information to the user. We formulate the optimization problem to identify the haptic hardware setup that maximizes the information transfer between the intended message and the user's interpretation, accounting for individual differences in sensitivity, preferences, and perceptual salience. We evaluate this framework through user studies where participants interact with reconfigurable displays under different signal combinations. Our findings support the role of modularity and personalization in creating multimodal haptic interfaces and advance the development of reconfigurable systems that adapt with users in dynamic human-machine interaction contexts.
Physics-Grounded Differentiable Simulation for Soft Growing Robots
Jan 29, 2025



Soft-growing robots (i.e., vine robots) are a promising class of soft robots that allow for navigation and growth in tightly confined environments. However, these robots remain challenging to model and control due to the complex interplay of the inflated structure and inextensible materials, which leads to obstacles for autonomous operation and design optimization. Although there exist simulators for these systems that have achieved qualitative and quantitative success in matching high-level behavior, they still often fail to capture realistic vine robot shapes using simplified parameter models and have difficulties in high-throughput simulation necessary for planning and parameter optimization. We propose a differentiable simulator for these systems, enabling the use of the simulator "in-the-loop" of gradient-based optimization approaches to address the issues listed above. With the more complex parameter fitting made possible by this approach, we experimentally validate and integrate a closed-form nonlinear stiffness model for thin-walled inflated tubes based on a first-principles approach to local material wrinkling. Our simulator also takes advantage of data-parallel operations by leveraging existing differentiable computation frameworks, allowing multiple simultaneous rollouts. We demonstrate the feasibility of using a physics-grounded nonlinear stiffness model within our simulator, and how it can be an effective tool in sim-to-real transfer. We provide our implementation open source.
Anisotropic Stiffness and Programmable Actuation for Soft Robots Enabled by an Inflated Rotational Joint
Oct 16, 2024



Soft robots are known for their ability to perform tasks with great adaptability, enabled by their distributed, non-uniform stiffness and actuation. Bending is the most fundamental motion for soft robot design, but creating robust, and easy-to-fabricate soft bending joint with tunable properties remains an active problem of research. In this work, we demonstrate an inflatable actuation module for soft robots with a defined bending plane enabled by forced partial wrinkling. This lowers the structural stiffness in the bending direction, with the final stiffness easily designed by the ratio of wrinkled and unwrinkled regions. We present models and experimental characterization showing the stiffness properties of the actuation module, as well as its ability to maintain the kinematic constraint over a large range of loading conditions. We demonstrate the potential for complex actuation in a soft continuum robot and for decoupling actuation force and efficiency from load capacity. The module provides a novel method for embedding intelligent actuation into soft pneumatic robots.
A Review of Communicating Robot Learning during Human-Robot Interaction
Dec 01, 2023



For robots to seamlessly interact with humans, we first need to make sure that humans and robots understand one another. Diverse algorithms have been developed to enable robots to learn from humans (i.e., transferring information from humans to robots). In parallel, visual, haptic, and auditory communication interfaces have been designed to convey the robot's internal state to the human (i.e., transferring information from robots to humans). Prior research often separates these two directions of information transfer, and focuses primarily on either learning algorithms or communication interfaces. By contrast, in this review we take an interdisciplinary approach to identify common themes and emerging trends that close the loop between learning and communication. Specifically, we survey state-of-the-art methods and outcomes for communicating a robot's learning back to the human teacher during human-robot interaction. This discussion connects human-in-the-loop learning methods and explainable robot learning with multi-modal feedback systems and measures of human-robot interaction. We find that -- when learning and communication are developed together -- the resulting closed-loop system can lead to improved human teaching, increased human trust, and human-robot co-adaptation. The paper includes a perspective on several of the interdisciplinary research themes and open questions that could advance how future robots communicate their learning to everyday operators. Finally, we implement a selection of the reviewed methods in a case study where participants kinesthetically teach a robot arm. This case study documents and tests an integrated approach for learning in ways that can be communicated, conveying this learning across multi-modal interfaces, and measuring the resulting changes in human and robot behavior. See videos of our case study here: https://youtu.be/EXfQctqFzWs
The Folded Pneumatic Artificial Muscle (foldPAM): Towards Programmability and Control via End Geometry
Sep 03, 2022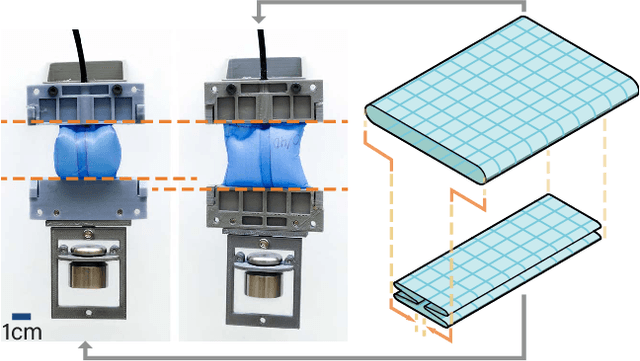
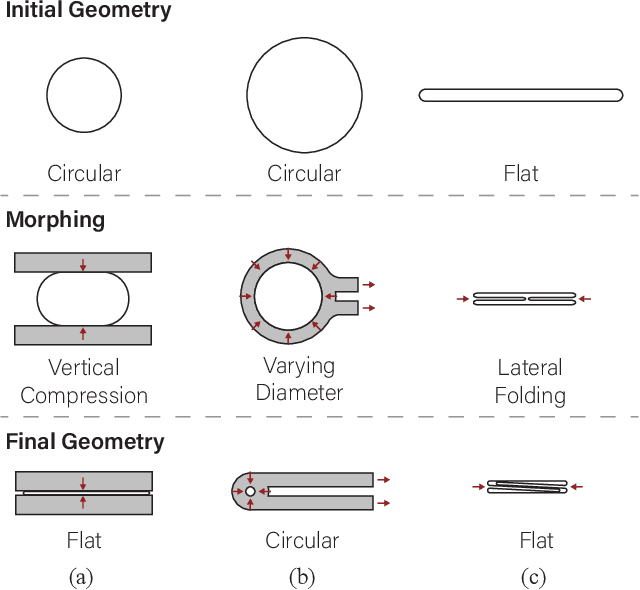
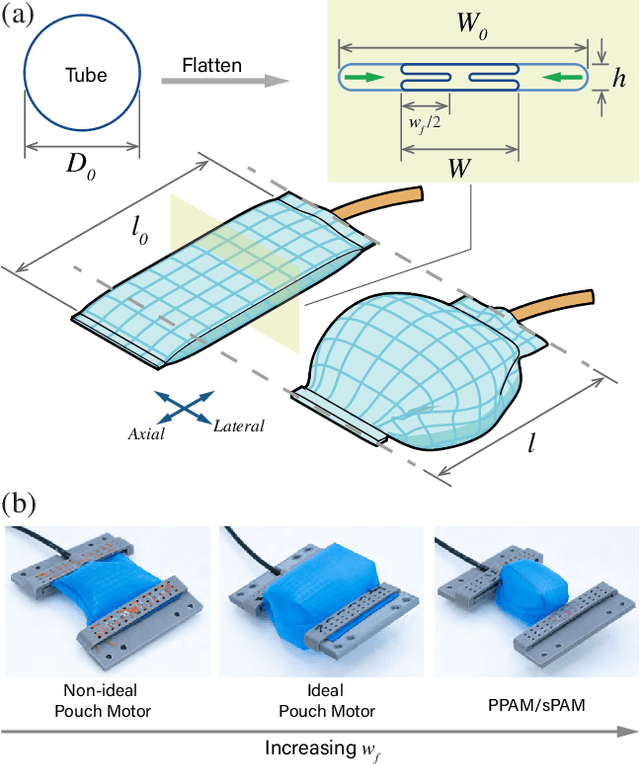
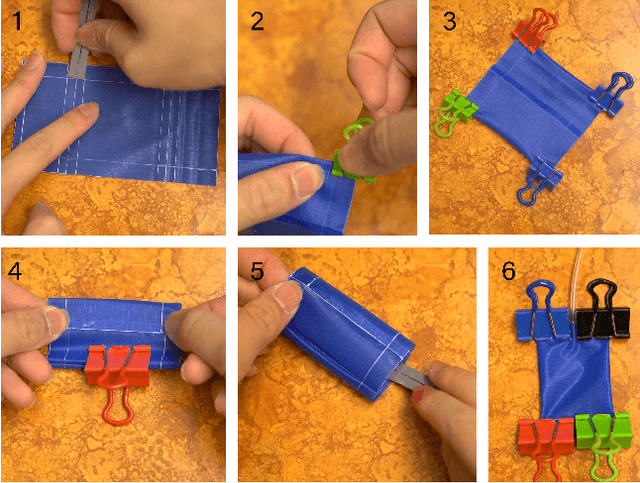
Soft pneumatic actuators have seen applications in many soft robotic systems, and their pressure-driven nature presents unique challenges and opportunities for controlling their motion. In this work, we present a new concept: designing and controlling pneumatic actuators via end geometry. We demonstrate a novel actuator class, named the folded Pneumatic Artificial Muscle (foldPAM), which features a thin-filmed air pouch that is symmetrically folded on each side. Varying the folded portion of the actuator changes the end constraints and, hence, the force-strain relationships. We investigated this change experimentally by measuring the force-strain relationship of individual foldPAM units with various lengths and amounts of folding. In addition to static-geometry units, an actuated foldPAM device was designed to produce continuous, on-demand adjustment of the end geometry, enabling closed-loop position control while maintaining constant pressure. Experiments with the device indicate that geometry control allows access to different areas on the force-strain plane and that closed-loop geometry control can achieve errors within 0.5% of the actuation range.
Wrapping Haptic Displays Around Robot Arms to Communicate Learning
Jul 07, 2022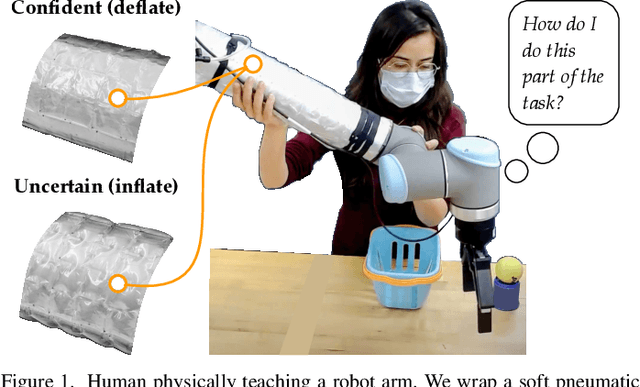
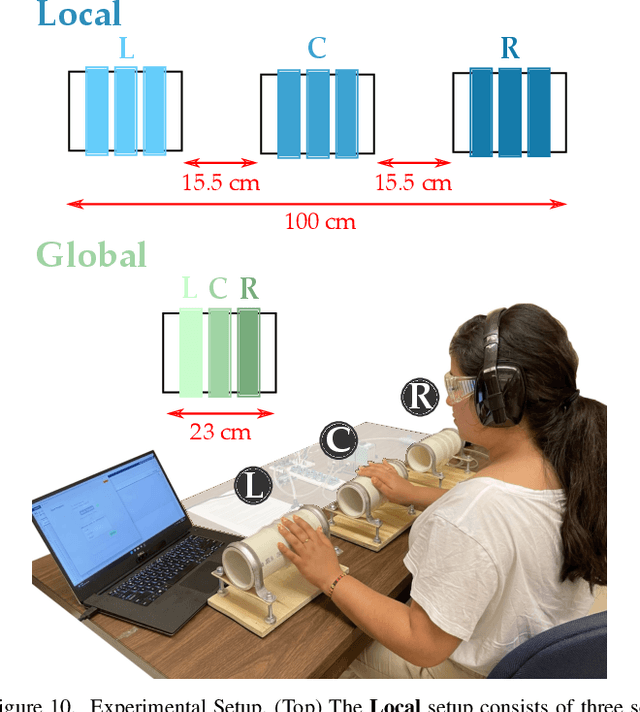
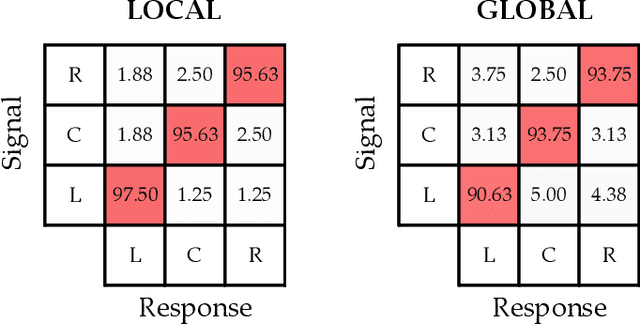
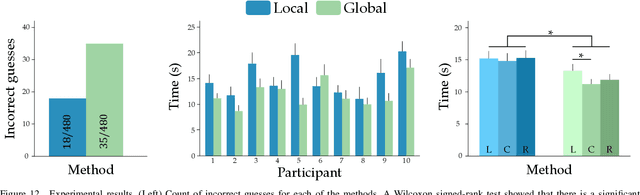
Humans can leverage physical interaction to teach robot arms. As the human kinesthetically guides the robot through demonstrations, the robot learns the desired task. While prior works focus on how the robot learns, it is equally important for the human teacher to understand what their robot is learning. Visual displays can communicate this information; however, we hypothesize that visual feedback alone misses out on the physical connection between the human and robot. In this paper we introduce a novel class of soft haptic displays that wrap around the robot arm, adding signals without affecting interaction. We first design a pneumatic actuation array that remains flexible in mounting. We then develop single and multi-dimensional versions of this wrapped haptic display, and explore human perception of the rendered signals during psychophysic tests and robot learning. We ultimately find that people accurately distinguish single-dimensional feedback with a Weber fraction of 11.4%, and identify multi-dimensional feedback with 94.5% accuracy. When physically teaching robot arms, humans leverage the single- and multi-dimensional feedback to provide better demonstrations than with visual feedback: our wrapped haptic display decreases teaching time while increasing demonstration quality. This improvement depends on the location and distribution of the wrapped haptic display. You can see videos of our device and experiments here: https://youtu.be/yPcMGeqsjdM
Wrapped Haptic Display for Communicating Physical Robot Learning
Nov 08, 2021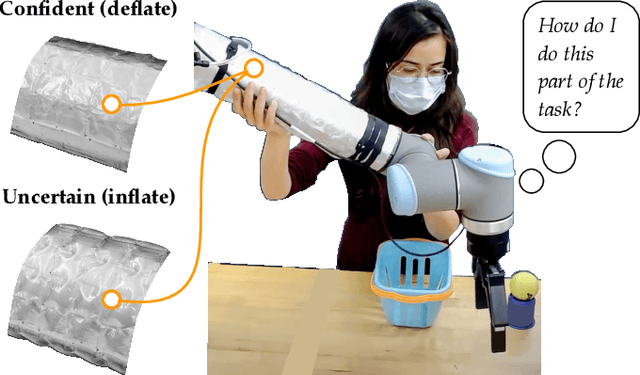
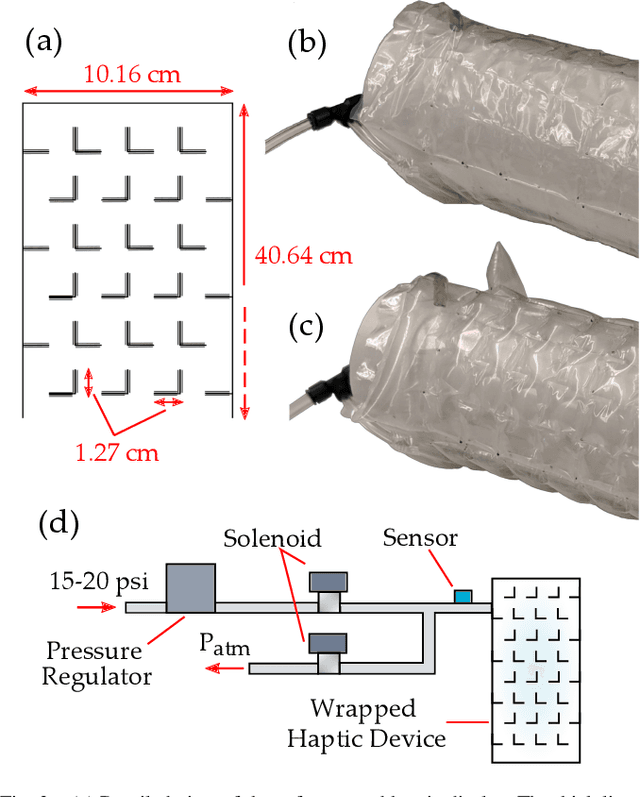
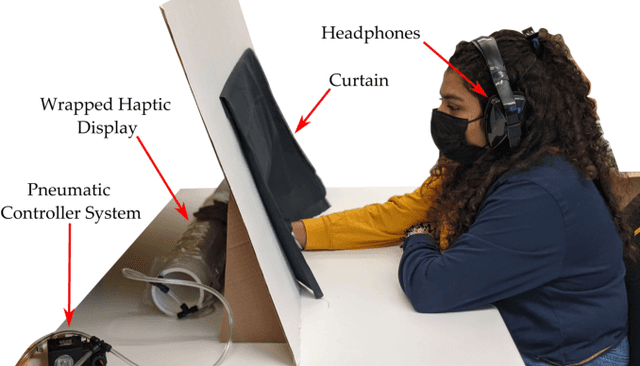
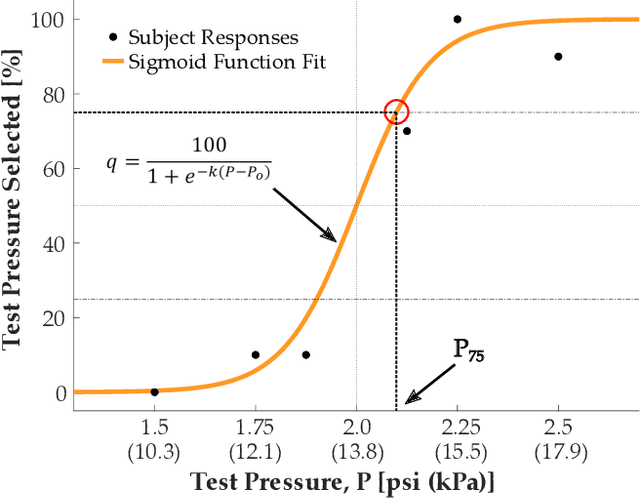
Physical interaction between humans and robots can help robots learn to perform complex tasks. The robot arm gains information by observing how the human kinesthetically guides it throughout the task. While prior works focus on how the robot learns, it is equally important that this learning is transparent to the human teacher. Visual displays that show the robot's uncertainty can potentially communicate this information; however, we hypothesize that visual feedback mechanisms miss out on the physical connection between the human and robot. In this work we present a soft haptic display that wraps around and conforms to the surface of a robot arm, adding a haptic signal at an existing point of contact without significantly affecting the interaction. We demonstrate how soft actuation creates a salient haptic signal while still allowing flexibility in device mounting. Using a psychophysics experiment, we show that users can accurately distinguish inflation levels of the wrapped display with an average Weber fraction of 11.4%. When we place the wrapped display around the arm of a robotic manipulator, users are able to interpret and leverage the haptic signal in sample robot learning tasks, improving identification of areas where the robot needs more training and enabling the user to provide better demonstrations. See videos of our device and user studies here: https://youtu.be/tX-2Tqeb9Nw
Shared-Control Teleoperation Paradigms on a Soft Growing Robot Manipulator
Aug 02, 2021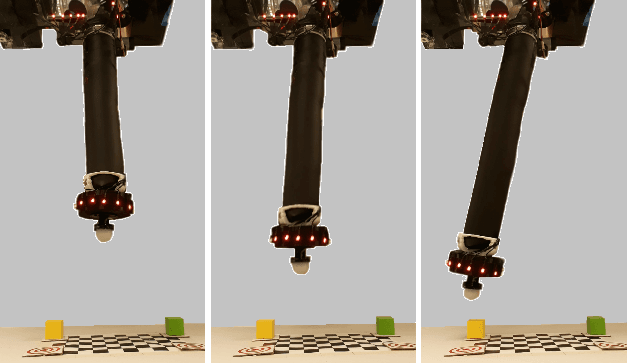
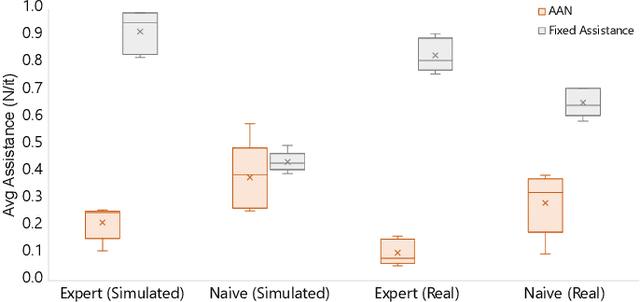
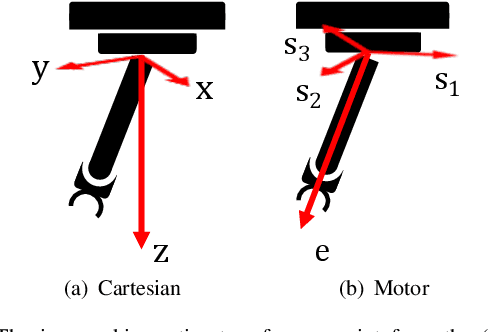
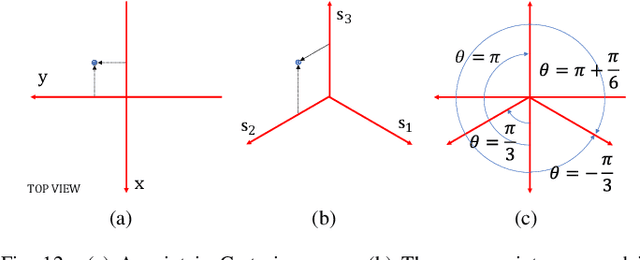
Semi-autonomous telerobotic systems allow both humans and robots to exploit their strengths, while enabling personalized execution of a task. However, for new soft robots with degrees of freedom dissimilar to those of human operators, it is unknown how the control of a task should be divided between the human and robot. This work presents a set of interaction paradigms between a human and a soft growing robot manipulator, and demonstrates them in both real and simulated scenarios. The robot can grow and retract by eversion and inversion of its tubular body, a property we exploit to implement interaction paradigms. We implemented and tested six different paradigms of human-robot interaction, beginning with full teleoperation and gradually adding automation to various aspects of the task execution. All paradigms were demonstrated by two expert and two naive operators. Results show that humans and the soft robot manipulator can split control along degrees of freedom while acting simultaneously. In the simple pick-and-place task studied in this work, performance improves as the control is gradually given to the robot, because the robot can correct certain human errors. However, human engagement and enjoyment may be maximized when the task is at least partially shared. Finally, when the human operator is assisted by haptic feedback based on soft robot position errors, we observed that the improvement in performance is highly dependent on the expertise of the human operator.