 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultimodal Graph-based Classification of Esophageal Motility Disorders
May 13, 2026Diagnosing esophageal motility disorders pose significant challenges due to the complexity of high-resolution impedance manometry (HRIM) data and variability in clinical interpretation. This work explores the feasibility of a multimodal Machine Learning (ML)-based classification approach that combines HRIM recordings with patient-specific information and incorporates a graph-based modeling of esophageal physiology. We analyze HRIM recordings with corresponding patient information from 104 patients with esophageal motility disorders. Patient data includes demographic, clinical, and symptom information extracted from structured questionnaires and free-text notes using keyword detection and large language model-based processing. HRIM data is represented as spatio-temporal graphs, where nodes correspond to pressure values along the esophagus and edges encode spatial adjacency and impedance dynamics. A graph neural network (GNN) is applied to learn physiologically meaningful representations, which are fused with patient embeddings for multi-category, multi-class classification of swallow events. The impact of patient features and graph-based modeling is evaluated by ablation studies and comparison to vision-based classifier baselines. The proposed multimodal approach indicates improvements over models that rely solely on HRIM-derived features across all classification categories. Additionally, the graph-based modeling provides gains compared to vision-based baselines. Our experiments systematically assess the complementary contribution of multiple modalities, as well as demonstrate the feasibility of our proposed graph-based approach. Our initial findings demonstrate that integrating patient-level data with graph-based representations of HRIM signals appears to be a promising direction for more accurate classification of esophageal motility disorders.
Attachment Anchors: A Novel Framework for Laparoscopic Grasping Point Prediction in Colorectal Surgery
Feb 19, 2026Accurate grasping point prediction is a key challenge for autonomous tissue manipulation in minimally invasive surgery, particularly in complex and variable procedures such as colorectal interventions. Due to their complexity and prolonged duration, colorectal procedures have been underrepresented in current research. At the same time, they pose a particularly interesting learning environment due to repetitive tissue manipulation, making them a promising entry point for autonomous, machine learning-driven support. Therefore, in this work, we introduce attachment anchors, a structured representation that encodes the local geometric and mechanical relationships between tissue and its anatomical attachments in colorectal surgery. This representation reduces uncertainty in grasping point prediction by normalizing surgical scenes into a consistent local reference frame. We demonstrate that attachment anchors can be predicted from laparoscopic images and incorporated into a grasping framework based on machine learning. Experiments on a dataset of 90 colorectal surgeries demonstrate that attachment anchors improve grasping point prediction compared to image-only baselines. There are particularly strong gains in out-of-distribution settings, including unseen procedures and operating surgeons. These results suggest that attachment anchors are an effective intermediate representation for learning-based tissue manipulation in colorectal surgery.
Video Dataset for Surgical Phase, Keypoint, and Instrument Recognition in Laparoscopic Surgery (PhaKIR)
Nov 09, 2025Robotic- and computer-assisted minimally invasive surgery (RAMIS) is increasingly relying on computer vision methods for reliable instrument recognition and surgical workflow understanding. Developing such systems often requires large, well-annotated datasets, but existing resources often address isolated tasks, neglect temporal dependencies, or lack multi-center variability. We present the Surgical Procedure Phase, Keypoint, and Instrument Recognition (PhaKIR) dataset, comprising eight complete laparoscopic cholecystectomy videos recorded at three medical centers. The dataset provides frame-level annotations for three interconnected tasks: surgical phase recognition (485,875 frames), instrument keypoint estimation (19,435 frames), and instrument instance segmentation (19,435 frames). PhaKIR is, to our knowledge, the first multi-institutional dataset to jointly provide phase labels, instrument pose information, and pixel-accurate instrument segmentations, while also enabling the exploitation of temporal context since full surgical procedure sequences are available. It served as the basis for the PhaKIR Challenge as part of the Endoscopic Vision (EndoVis) Challenge at MICCAI 2024 to benchmark methods in surgical scene understanding, thereby further validating the dataset's quality and relevance. The dataset is publicly available upon request via the Zenodo platform.
On the notion of missingness for path attribution explainability methods in medical settings: Guiding the selection of medically meaningful baselines
Aug 20, 2025The explainability of deep learning models remains a significant challenge, particularly in the medical domain where interpretable outputs are critical for clinical trust and transparency. Path attribution methods such as Integrated Gradients rely on a baseline input representing the absence of relevant features ("missingness"). Commonly used baselines, such as all-zero inputs, are often semantically meaningless, especially in medical contexts where missingness can itself be informative. While alternative baseline choices have been explored, existing methods lack a principled approach to dynamically select baselines tailored to each input. In this work, we examine the notion of missingness in the medical setting, analyze its implications for baseline selection, and introduce a counterfactual-guided approach to address the limitations of conventional baselines. We argue that a clinically normal but input-close counterfactual represents a more accurate representation of a meaningful absence of features in medical data. To implement this, we use a Variational Autoencoder to generate counterfactual baselines, though our concept is generative-model-agnostic and can be applied with any suitable counterfactual method. We evaluate the approach on three distinct medical data sets and empirically demonstrate that counterfactual baselines yield more faithful and medically relevant attributions compared to standard baseline choices.
Comparative validation of surgical phase recognition, instrument keypoint estimation, and instrument instance segmentation in endoscopy: Results of the PhaKIR 2024 challenge
Jul 22, 2025Reliable recognition and localization of surgical instruments in endoscopic video recordings are foundational for a wide range of applications in computer- and robot-assisted minimally invasive surgery (RAMIS), including surgical training, skill assessment, and autonomous assistance. However, robust performance under real-world conditions remains a significant challenge. Incorporating surgical context - such as the current procedural phase - has emerged as a promising strategy to improve robustness and interpretability. To address these challenges, we organized the Surgical Procedure Phase, Keypoint, and Instrument Recognition (PhaKIR) sub-challenge as part of the Endoscopic Vision (EndoVis) challenge at MICCAI 2024. We introduced a novel, multi-center dataset comprising thirteen full-length laparoscopic cholecystectomy videos collected from three distinct medical institutions, with unified annotations for three interrelated tasks: surgical phase recognition, instrument keypoint estimation, and instrument instance segmentation. Unlike existing datasets, ours enables joint investigation of instrument localization and procedural context within the same data while supporting the integration of temporal information across entire procedures. We report results and findings in accordance with the BIAS guidelines for biomedical image analysis challenges. The PhaKIR sub-challenge advances the field by providing a unique benchmark for developing temporally aware, context-driven methods in RAMIS and offers a high-quality resource to support future research in surgical scene understanding.
Detecting and clustering swallow events in esophageal long-term high-resolution manometry
May 02, 2024



High-resolution manometry (HRM) is the gold standard in diagnosing esophageal motility disorders. As HRM is typically conducted under short-term laboratory settings, intermittently occurring disorders are likely to be missed. Therefore, long-term (up to 24h) HRM (LTHRM) is used to gain detailed insights into the swallowing behavior. However, analyzing the extensive data from LTHRM is challenging and time consuming as medical experts have to analyze the data manually, which is slow and prone to errors. To address this challenge, we propose a Deep Learning based swallowing detection method to accurately identify swallowing events and secondary non-deglutitive-induced esophageal motility disorders in LTHRM data. We then proceed with clustering the identified swallows into distinct classes, which are analyzed by highly experienced clinicians to validate the different swallowing patterns. We evaluate our computational pipeline on a total of 25 LTHRMs, which were meticulously annotated by medical experts. By detecting more than 94% of all relevant swallow events and providing all relevant clusters for a more reliable diagnostic process among experienced clinicians, we are able to demonstrate the effectiveness as well as positive clinical impact of our approach to make LTHRM feasible in clinical care.
Motion-Corrected Moving Average: Including Post-Hoc Temporal Information for Improved Video Segmentation
Mar 05, 2024



Real-time computational speed and a high degree of precision are requirements for computer-assisted interventions. Applying a segmentation network to a medical video processing task can introduce significant inter-frame prediction noise. Existing approaches can reduce inconsistencies by including temporal information but often impose requirements on the architecture or dataset. This paper proposes a method to include temporal information in any segmentation model and, thus, a technique to improve video segmentation performance without alterations during training or additional labeling. With Motion-Corrected Moving Average, we refine the exponential moving average between the current and previous predictions. Using optical flow to estimate the movement between consecutive frames, we can shift the prior term in the moving-average calculation to align with the geometry of the current frame. The optical flow calculation does not require the output of the model and can therefore be performed in parallel, leading to no significant runtime penalty for our approach. We evaluate our approach on two publicly available segmentation datasets and two proprietary endoscopic datasets and show improvements over a baseline approach.
MITI: SLAM Benchmark for Laparoscopic Surgery
Feb 23, 2022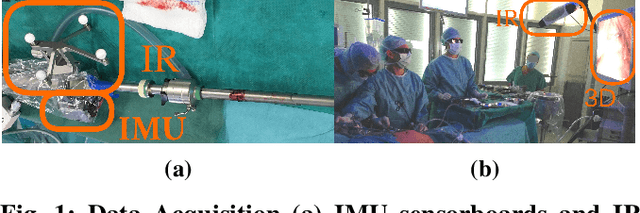
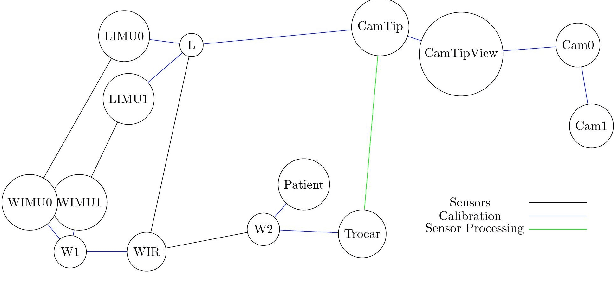
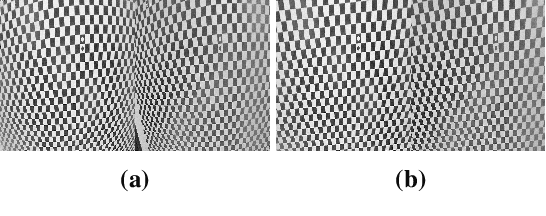
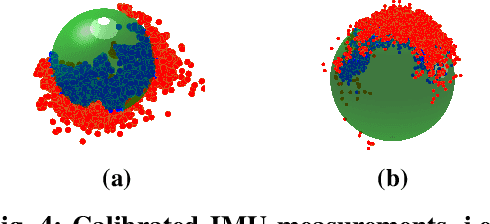
We propose a new benchmark for evaluating stereoscopic visual-inertial computer vision algorithms (SLAM/ SfM/ 3D Reconstruction/ Visual-Inertial Odometry) for minimally invasive surgical (MIS) interventions in the abdomen. Our MITI Dataset available at [https://mediatum.ub.tum.de/1621941] provides all the necessary data by a complete recording of a handheld surgical intervention at Research Hospital Rechts der Isar of TUM. It contains multimodal sensor information from IMU, stereoscopic video, and infrared (IR) tracking as ground truth for evaluation. Furthermore, calibration for the stereoscope, accelerometer, magnetometer, the rigid transformations in the sensor setup, and time-offsets are available. We wisely chose a suitable intervention that contains very few cutting and tissue deformation and shows a full scan of the abdomen with a handheld camera such that it is ideal for testing SLAM algorithms. Intending to promote the progress of visual-inertial algorithms designed for MIS application, we hope that our clinical training dataset helps and enables researchers to enhance algorithms.
Constrained Visual-Inertial Localization With Application And Benchmark in Laparoscopic Surgery
Feb 22, 2022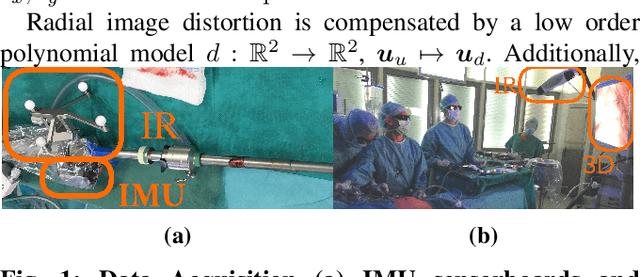
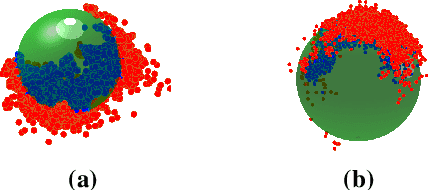
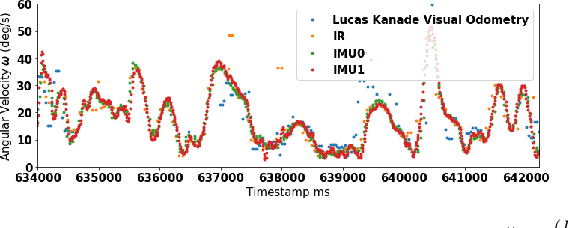
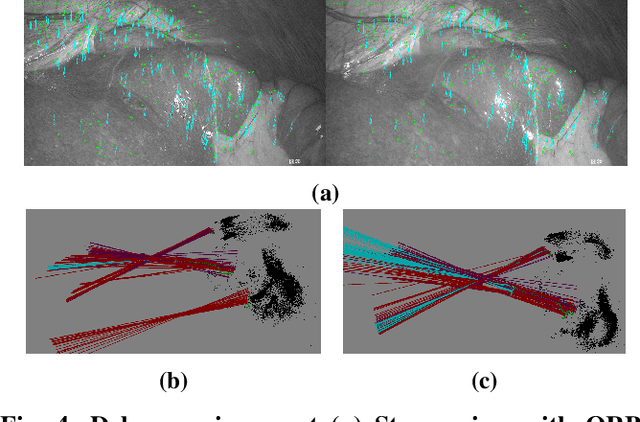
We propose a novel method to tackle the visual-inertial localization problem for constrained camera movements. We use residuals from the different modalities to jointly optimize a global cost function. The residuals emerge from IMU measurements, stereoscopic feature points, and constraints on possible solutions in SE(3). In settings where dynamic disturbances are frequent, the residuals reduce the complexity of the problem and make localization feasible. We verify the advantages of our method in a suitable medical use case and produce a dataset capturing a minimally invasive surgery in the abdomen. Our novel clinical dataset MITI is comparable to state-of-the-art evaluation datasets, contains calibration and synchronization and is available at https://mediatum.ub.tum.de/1621941.