 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGround Slow, Move Fast: A Dual-System Foundation Model for Generalizable Vision-and-Language Navigation
Dec 09, 2025While recent large vision-language models (VLMs) have improved generalization in vision-language navigation (VLN), existing methods typically rely on end-to-end pipelines that map vision-language inputs directly to short-horizon discrete actions. Such designs often produce fragmented motions, incur high latency, and struggle with real-world challenges like dynamic obstacle avoidance. We propose DualVLN, the first dual-system VLN foundation model that synergistically integrates high-level reasoning with low-level action execution. System 2, a VLM-based global planner, "grounds slowly" by predicting mid-term waypoint goals via image-grounded reasoning. System 1, a lightweight, multi-modal conditioning Diffusion Transformer policy, "moves fast" by leveraging both explicit pixel goals and latent features from System 2 to generate smooth and accurate trajectories. The dual-system design enables robust real-time control and adaptive local decision-making in complex, dynamic environments. By decoupling training, the VLM retains its generalization, while System 1 achieves interpretable and effective local navigation. DualVLN outperforms prior methods across all VLN benchmarks and real-world experiments demonstrate robust long-horizon planning and real-time adaptability in dynamic environments.
ShanghaiTech Mapping Robot is All You Need: Robot System for Collecting Universal Ground Vehicle Datasets
Jun 24, 2024This paper presents the ShanghaiTech Mapping Robot, a state-of-the-art unmanned ground vehicle (UGV) designed for collecting comprehensive multi-sensor datasets to support research in robotics, computer vision, and autonomous driving. The robot is equipped with a wide array of sensors including RGB cameras, RGB-D cameras, event-based cameras, IR cameras, LiDARs, mmWave radars, IMUs, ultrasonic range finders, and a GNSS RTK receiver. The sensor suite is integrated onto a specially designed mechanical structure with a centralized power system and a synchronization mechanism to ensure spatial and temporal alignment of the sensor data. A 16-node on-board computing cluster handles sensor control, data collection, and storage. We describe the hardware and software architecture of the robot in detail and discuss the calibration procedures for the various sensors. The capabilities of the platform are demonstrated through an extensive dataset collected in diverse real-world environments. To facilitate research, we make the dataset publicly available along with the associated robot sensor calibration data. Performance evaluations on a set of standard perception and localization tasks showcase the potential of the dataset to support developments in Robot Autonomy.
osmAG: Hierarchical Semantic Topometric Area Graph Maps in the OSM Format for Mobile Robotics
Sep 09, 2023Maps are essential to mobile robotics tasks like localization and planning. We propose the open street map (osm) XML based Area Graph file format to store hierarchical, topometric semantic multi-floor maps of indoor and outdoor environments, since currently no such format is popular within the robotics community. Building on-top of osm we leverage the available open source editing tools and libraries of osm, while adding the needed mobile robotics aspect with building-level obstacle representation yet very compact, topometric data that facilitates planning algorithms. Through the use of common osm keys as well as custom ones we leverage the power of semantic annotation to enable various applications. For example, we support planning based on robot capabilities, to take the locomotion mode and attributes in conjunction with the environment information into account. The provided C++ library is integrated into ROS. We evaluate the performance of osmAG using real data in a global path planning application on a very big osmAG map, demonstrating its convenience and effectiveness for mobile robots.
Cluster on Wheels
May 19, 2022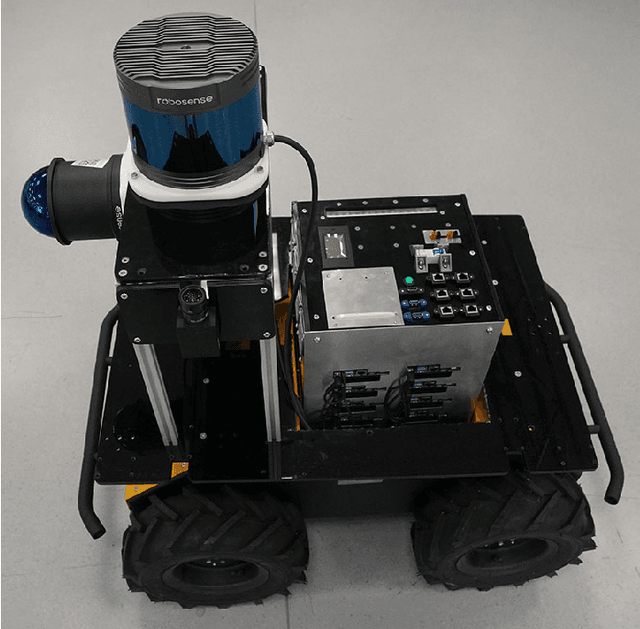
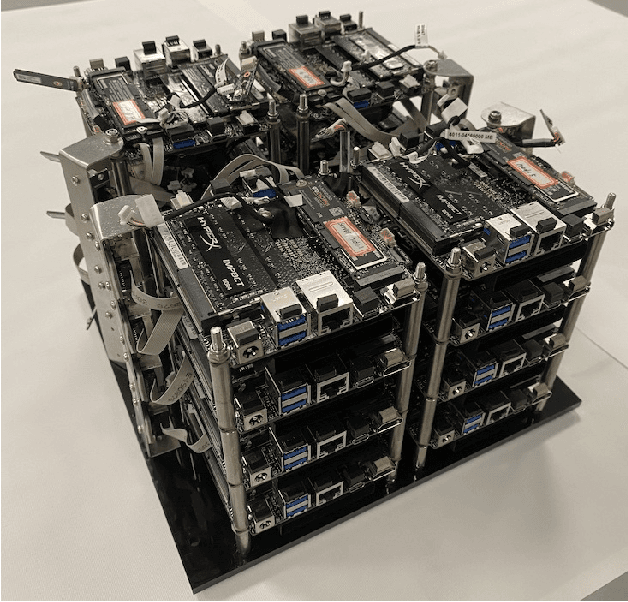
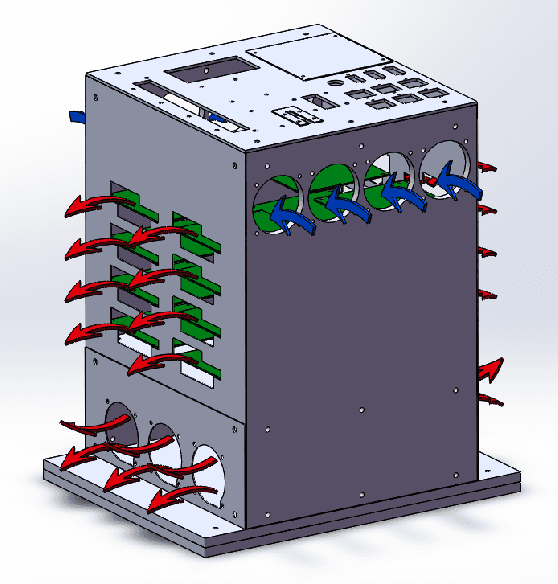
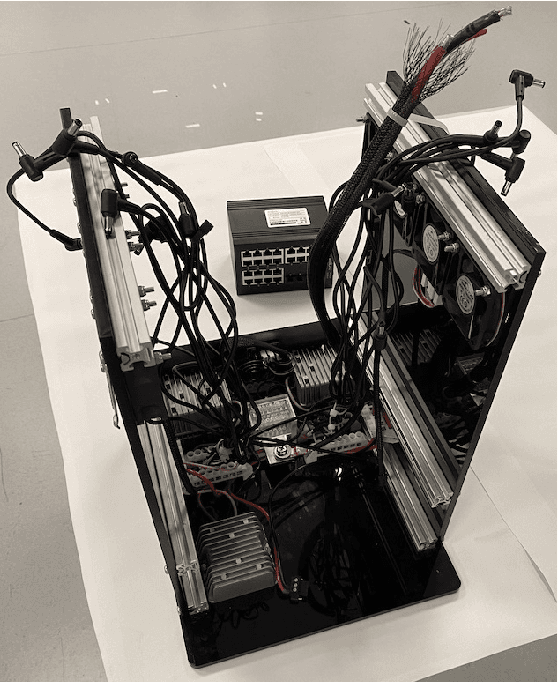
This paper presents a very compact 16-node cluster that is the core of a future robot for collecting and storing massive amounts of sensor data for research on Simultaneous Localization and Mapping (SLAM). To the best of our knowledge, this is the first time that such a cluster is used in robotics. We first present the requirements and different options for computing of such a robot and then show the hardware and software of our solution in detail. The cluster consists of 16 nodes of AMD Ryzen 7 5700U CPUs with a total of 128 cores. As a system that is to be used on a Clearpath Husky robot, it is very small in size, can be operated from battery power and has all required power and networking components integrated. Stress tests on the completed cluster show that it performs well.
* 8 pages, 7 figures, 2022 International Conference for Advancement in Technology(ICONAT). It is about the work of the mapping robot cluster computer platform