 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCar-STAGE: Automated framework for large-scale high-dimensional simulated time-series data generation based on user-defined criteria
Mar 05, 2025Generating large-scale sensing datasets through photo-realistic simulation is an important aspect of many robotics applications such as autonomous driving. In this paper, we consider the problem of synchronous data collection from the open-source CARLA simulator using multiple sensors attached to vehicle based on user-defined criteria. We propose a novel, one-step framework that we refer to as Car-STAGE, based on CARLA simulator, to generate data using a graphical user interface (GUI) defining configuration parameters to data collection without any user intervention. This framework can utilize the user-defined configuration parameters such as choice of maps, number and configurations of sensors, environmental and lighting conditions etc. to run the simulation in the background, collecting high-dimensional sensor data from diverse sensors such as RGB Camera, LiDAR, Radar, Depth Camera, IMU Sensor, GNSS Sensor, Semantic Segmentation Camera, Instance Segmentation Camera, and Optical Flow Camera along with the ground-truths of the individual actors and storing the sensor data as well as ground-truth labels in a local or cloud-based database. The framework uses multiple threads where a main thread runs the server, a worker thread deals with queue and frame number and the rest of the threads processes the sensor data. The other way we derive speed up over the native implementation is by memory mapping the raw binary data into the disk and then converting the data into known formats at the end of data collection. We show that using these techniques, we gain a significant speed up over frames, under an increasing set of sensors and over the number of spawned objects.
Evaluation of automated driving system safety metrics with logged vehicle trajectory data
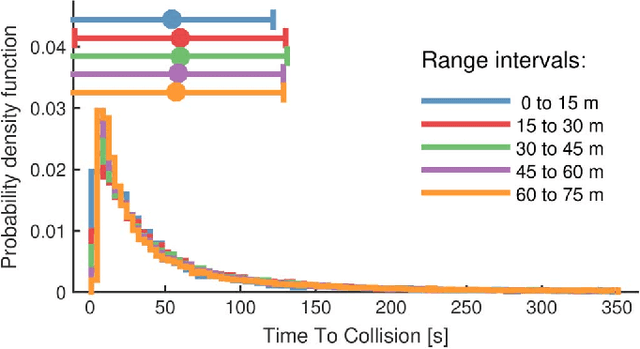
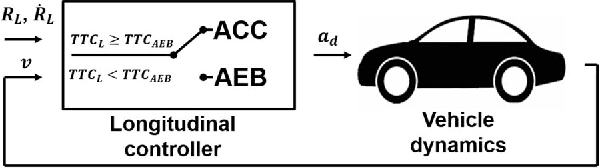
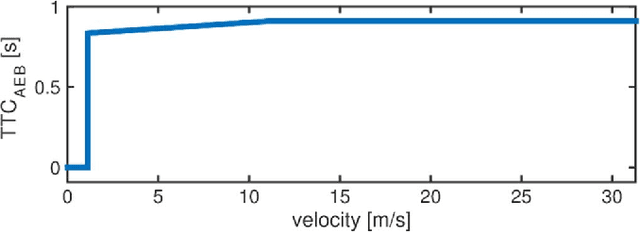
Jan 03, 2024Real-time safety metrics are important for the automated driving system (ADS) to assess the risk of driving situations and to assist the decision-making. Although a number of real-time safety metrics have been proposed in the literature, systematic performance evaluation of these safety metrics has been lacking. As different behavioral assumptions are adopted in different safety metrics, it is difficult to compare the safety metrics and evaluate their performance. To overcome this challenge, in this study, we propose an evaluation framework utilizing logged vehicle trajectory data, in that vehicle trajectories for both subject vehicle (SV) and background vehicles (BVs) are obtained and the prediction errors caused by behavioral assumptions can be eliminated. Specifically, we examine whether the SV is in a collision unavoidable situation at each moment, given all near-future trajectories of BVs. In this way, we level the ground for a fair comparison of different safety metrics, as a good safety metric should always alarm in advance to the collision unavoidable moment. When trajectory data from a large number of trips are available, we can systematically evaluate and compare different metrics' statistical performance. In the case study, three representative real-time safety metrics, including the time-to-collision (TTC), the PEGASUS Criticality Metric (PCM), and the Model Predictive Instantaneous Safety Metric (MPrISM), are evaluated using a large-scale simulated trajectory dataset. The proposed evaluation framework is important for researchers, practitioners, and regulators to characterize different metrics, and to select appropriate metrics for different applications. Moreover, by conducting failure analysis on moments when a safety metric failed, we can identify its potential weaknesses which are valuable for its potential refinements and improvements.
Object level footprint uncertainty quantification in infrastructure based sensing
Aug 24, 2023



We examine the problem of estimating footprint uncertainty of objects imaged using the infrastructure based camera sensing. A closed form relationship is established between the ground coordinates and the sources of the camera errors. Using the error propagation equation, the covariance of a given ground coordinate can be measured as a function of the camera errors. The uncertainty of the footprint of the bounding box can then be given as the function of all the extreme points of the object footprint. In order to calculate the uncertainty of a ground point, the typical error sizes of the error sources are required. We present a method of estimating the typical error sizes from an experiment using a static, high-precision LiDAR as the ground truth. Finally, we present a simulated case study of uncertainty quantification from infrastructure based camera in CARLA to provide a sense of how the uncertainty changes across a left turn maneuver.
A Novel Traffic Simulation Framework for Testing Autonomous Vehicles Using SUMO and CARLA
Oct 14, 2021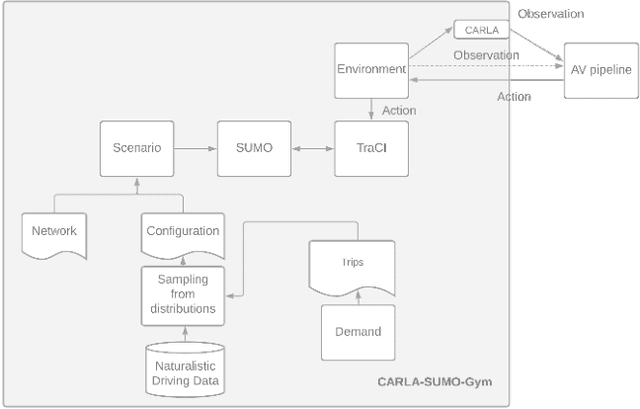

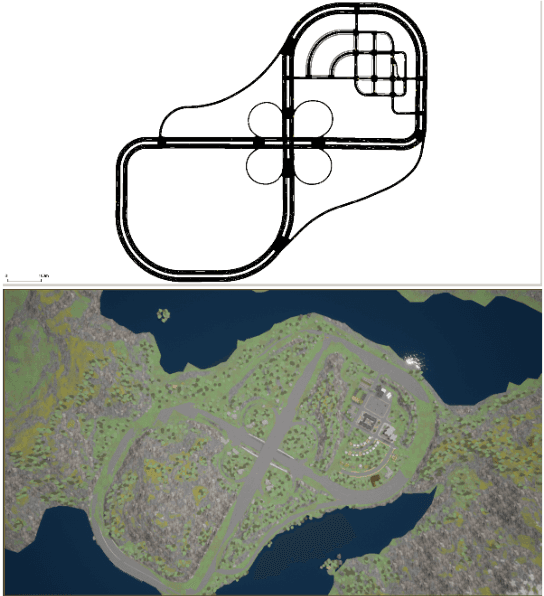
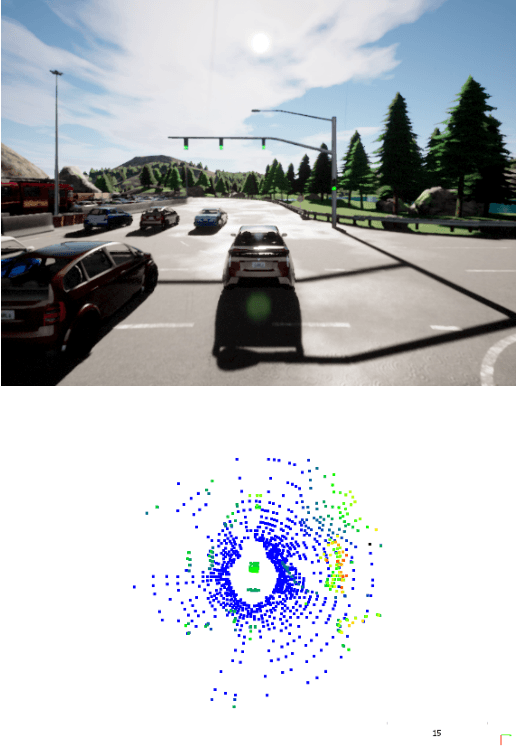
Traffic simulation is an efficient and cost-effective way to test Autonomous Vehicles (AVs) in a complex and dynamic environment. Numerous studies have been conducted for AV evaluation using traffic simulation over the past decades. However, the current simulation environments fall behind on two fronts -- the background vehicles (BVs) fail to simulate naturalistic driving behavior and the existing environments do not test the entire pipeline in a modular fashion. This study aims to propose a simulation framework that creates a complex and naturalistic traffic environment. Specifically, we combine a modified version of the Simulation of Urban MObility (SUMO) simulator with the Cars Learning to Act (CARLA) simulator to generate a simulation environment that could emulate the complexities of the external environment while providing realistic sensor outputs to the AV pipeline. In a past research work, we created an open-source Python package called SUMO-Gym which generates a realistic road network and naturalistic traffic through SUMO and combines that with OpenAI Gym to provide ease of use for the end user. We propose to extend our developed software by adding CARLA, which in turn will enrich the perception of the ego vehicle by providing realistic sensors outputs of the AVs surrounding environment. Using the proposed framework, AVs perception, planning, and control could be tested in a complex and realistic driving environment. The performance of the proposed framework in constructing output generation and AV evaluations are demonstrated using several case studies.
Enhancing SUMO simulator for simulation based testing and validation of autonomous vehicles
Sep 23, 2021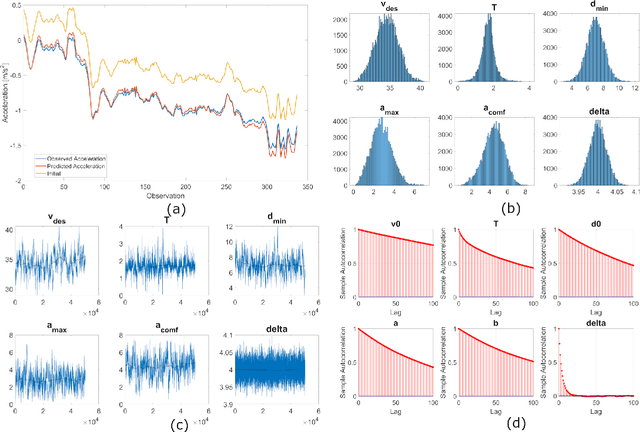
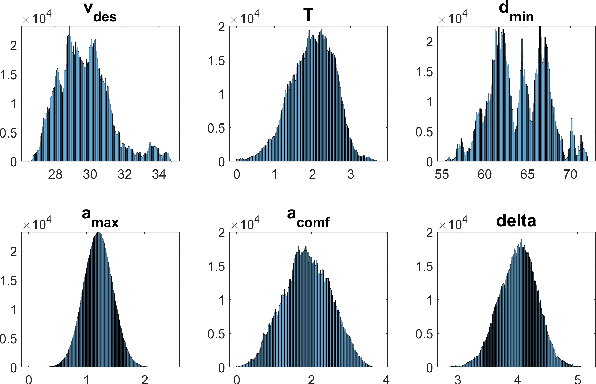
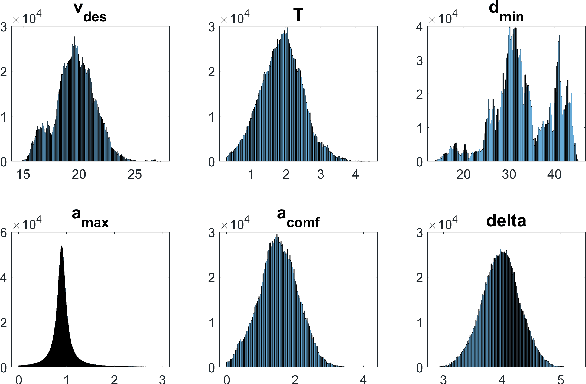
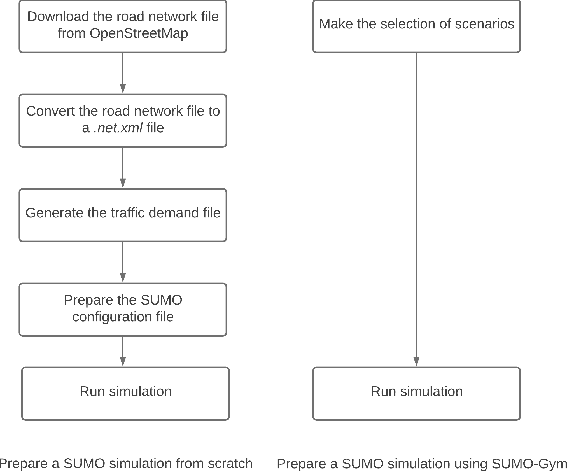
Current autonomous vehicle (AV) simulators are built to provide large-scale testing required to prove capabilities under varied conditions in controlled, repeatable fashion. However, they have certain failings including the need for user expertise and complex inconvenient tutorials for customized scenario creation. Simulation of Urban Mobility (SUMO) simulator, which has been presented as an open-source AV simulator, is used extensively but suffer from similar issues which make it difficult for entry-level practitioners to utilize the simulator without significant time investment. In that regard, we provide two enhancements to SUMO simulator geared towards massively improving user experience and providing real-life like variability for surrounding traffic. Firstly, we calibrate a car-following model, Intelligent Driver Model (IDM), for highway and urban naturalistic driving data and sample automatically from the parameter distributions to create the background vehicles. Secondly, we combine SUMO with OpenAI gym, creating a Python package which can run simulations based on real world highway and urban layouts with generic output observations and input actions that can be processed via any AV pipeline. Our aim through these enhancements is to provide an easy-to-use platform which can be readily used for AV testing and validation.
Accelerated Evaluation of Automated Vehicles Using Piecewise Mixture Models
Jan 31, 2017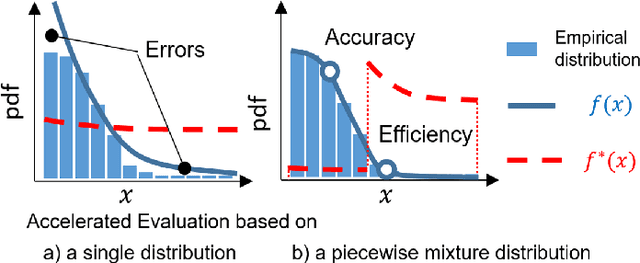
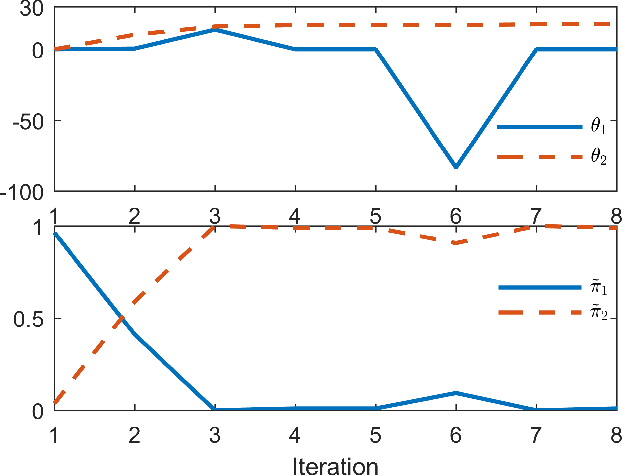
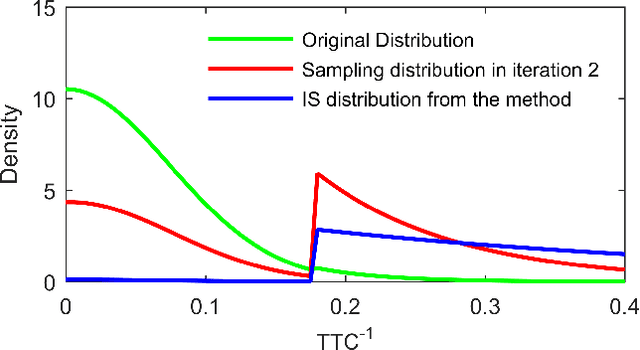
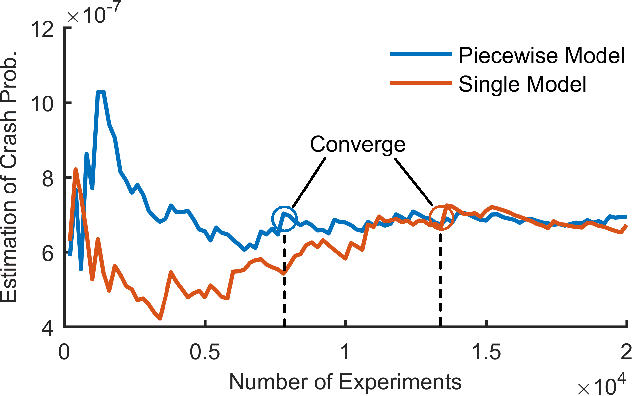
The process to certify highly Automated Vehicles has not yet been defined by any country in the world. Currently, companies test Automated Vehicles on public roads, which is time-consuming and inefficient. We proposed the Accelerated Evaluation concept, which uses a modified statistics of the surrounding vehicles and the Importance Sampling theory to reduce the evaluation time by several orders of magnitude, while ensuring the evaluation results are statistically accurate. In this paper, we further improve the accelerated evaluation concept by using Piecewise Mixture Distribution models, instead of Single Parametric Distribution models. We developed and applied this idea to forward collision control system reacting to vehicles making cut-in lane changes. The behavior of the cut-in vehicles was modeled based on more than 403,581 lane changes collected by the University of Michigan Safety Pilot Model Deployment Program. Simulation results confirm that the accuracy and efficiency of the Piecewise Mixture Distribution method outperformed single parametric distribution methods in accuracy and efficiency, and accelerated the evaluation process by almost four orders of magnitude.
Accelerated Evaluation of Automated Vehicles Safety in Lane Change Scenarios Based on Importance Sampling Techniques
Jun 16, 2016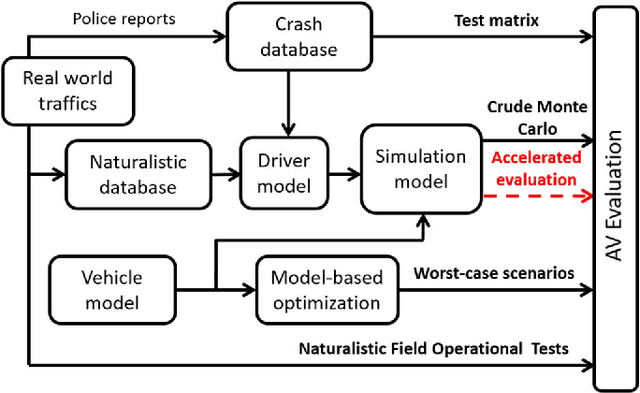
Automated vehicles (AVs) must be evaluated thoroughly before their release and deployment. A widely-used evaluation approach is the Naturalistic-Field Operational Test (N-FOT), which tests prototype vehicles directly on the public roads. Due to the low exposure to safety-critical scenarios, N-FOTs are time-consuming and expensive to conduct. In this paper, we propose an accelerated evaluation approach for AVs. The results can be used to generate motions of the primary other vehicles to accelerate the verification of AVs in simulations and controlled experiments. Frontal collision due to unsafe cut-ins is the target crash type of this paper. Human-controlled vehicles making unsafe lane changes are modeled as the primary disturbance to AVs based on data collected by the University of Michigan Safety Pilot Model Deployment Program. The cut-in scenarios are generated based on skewed statistics of collected human driver behaviors, which generate risky testing scenarios while preserving the statistical information so that the safety benefits of AVs in non-accelerated cases can be accurately estimated. The Cross Entropy method is used to recursively search for the optimal skewing parameters. The frequencies of occurrence of conflicts, crashes and injuries are estimated for a modeled automated vehicle, and the achieved accelerated rate is around 2,000 to 20,000. In other words, in the accelerated simulations, driving for 1,000 miles will expose the AV with challenging scenarios that will take about 2 to 20 million miles of real-world driving to encounter. This technique thus has the potential to reduce greatly the development and validation time for AVs.