 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdvanced Tool for Traffic Crash Analysis: An AI-Driven Multi-Agent Approach to Pre-Crash Reconstruction
Nov 13, 2025



Traffic collision reconstruction traditionally relies on human expertise, often yielding inconsistent results when analyzing incomplete multimodal data. This study develops a multi-agent AI framework that reconstructs pre-crash scenarios and infers vehicle behaviors from fragmented collision data. We present a two-phase collaborative framework combining reconstruction and reasoning phases. The system processes 277 rear-end lead vehicle deceleration (LVD) collisions from the Crash Investigation Sampling System, integrating textual crash reports, structured tabular data, and visual scene diagrams. Phase I generates natural-language crash reconstructions from multimodal inputs. Phase II performs in-depth crash reasoning by combining these reconstructions with temporal Event Data Recorder (EDR).For validation, we applied it to all LVD cases, focusing on a subset of 39 complex crashes where multiple EDR records per collision introduced ambiguity (e.g., due to missing or conflicting data).The evaluation of the 39 LVD crash cases revealed our framework achieved perfect accuracy across all test cases, successfully identifying both the most relevant EDR event and correctly distinguishing striking versus struck vehicles, surpassing the 92% accuracy achieved by human researchers on the same challenging dataset. The system maintained robust performance even when processing incomplete data, including missing or erroneous EDR records and ambiguous scene diagrams. This study demonstrates superior AI capabilities in processing heterogeneous collision data, providing unprecedented precision in reconstructing impact dynamics and characterizing pre-crash behaviors.
Cause-and-Effect Analysis of ADAS: A Comparison Study between Literature Review and Complaint Data
Jul 30, 2022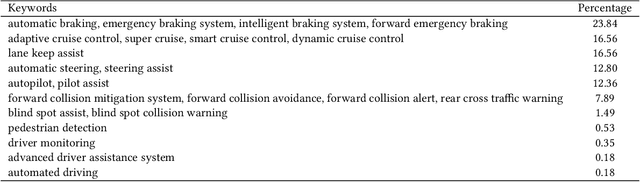
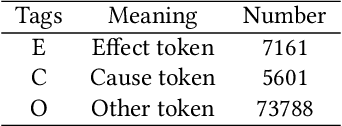
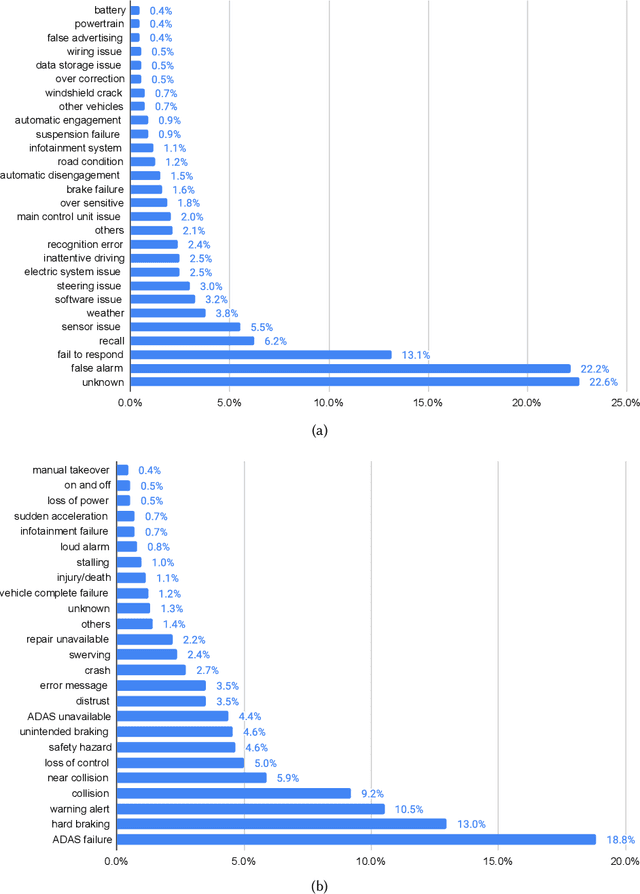

Advanced driver assistance systems (ADAS) are designed to improve vehicle safety. However, it is difficult to achieve such benefits without understanding the causes and limitations of the current ADAS and their possible solutions. This study 1) investigated the limitations and solutions of ADAS through a literature review, 2) identified the causes and effects of ADAS through consumer complaints using natural language processing models, and 3) compared the major differences between the two. These two lines of research identified similar categories of ADAS causes, including human factors, environmental factors, and vehicle factors. However, academic research focused more on human factors of ADAS issues and proposed advanced algorithms to mitigate such issues while drivers complained more of vehicle factors of ADAS failures, which led to associated top consequences. The findings from these two sources tend to complement each other and provide important implications for the improvement of ADAS in the future.
A Probabilistic Framework for Estimating the Risk of Pedestrian-Vehicle Conflicts at Intersections
Jul 28, 2022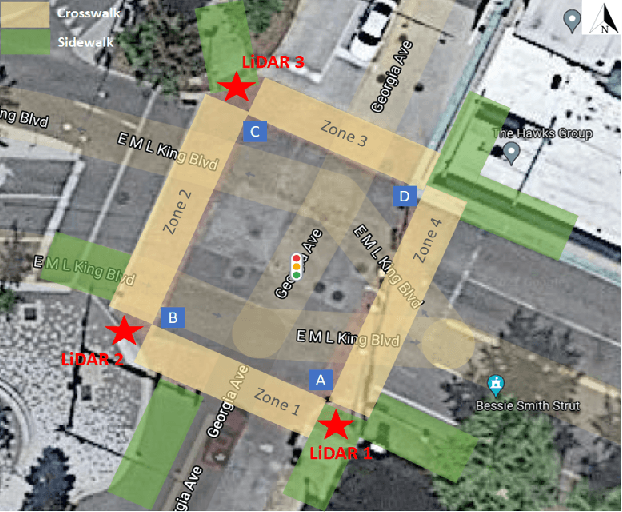
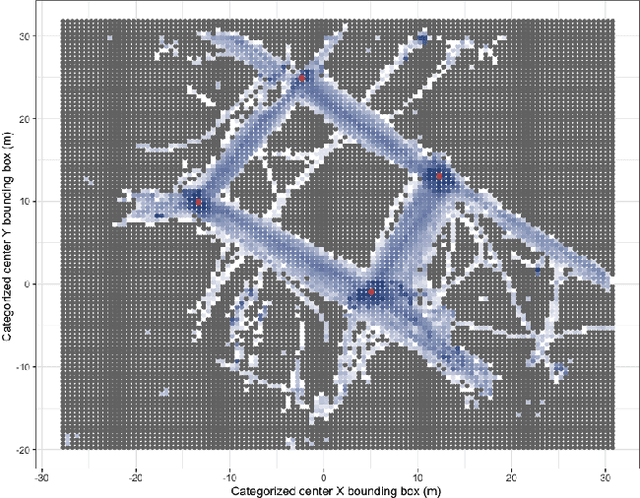
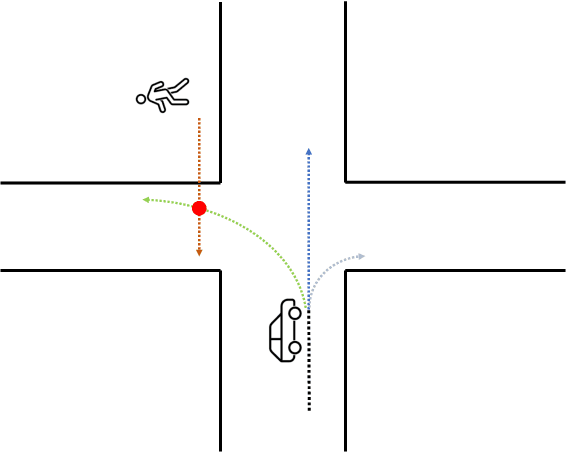
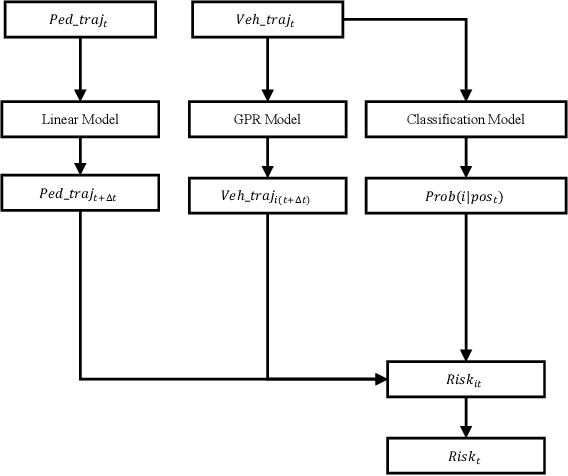
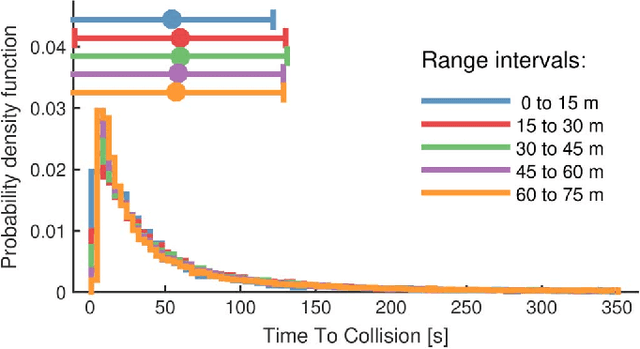
Pedestrian safety has become an important research topic among various studies due to the increased number of pedestrian-involved crashes. To evaluate pedestrian safety proactively, surrogate safety measures (SSMs) have been widely used in traffic conflict-based studies as they do not require historical crashes as inputs. However, most existing SSMs were developed based on the assumption that road users would maintain constant velocity and direction. Risk estimations based on this assumption are less unstable, more likely to be exaggerated, and unable to capture the evasive maneuvers of drivers. Considering the limitations among existing SSMs, this study proposes a probabilistic framework for estimating the risk of pedestrian-vehicle conflicts at intersections. The proposed framework loosen restrictions of constant speed by predicting trajectories using a Gaussian Process Regression and accounts for the different possible driver maneuvers with a Random Forest model. Real-world LiDAR data collected at an intersection was used to evaluate the performance of the proposed framework. The newly developed framework is able to identify all pedestrian-vehicle conflicts. Compared to the Time-to-Collision, the proposed framework provides a more stable risk estimation and captures the evasive maneuvers of vehicles. Moreover, the proposed framework does not require expensive computation resources, which makes it an ideal choice for real-time proactive pedestrian safety solutions at intersections.
Accelerated Evaluation of Automated Vehicles Safety in Lane Change Scenarios Based on Importance Sampling Techniques
Jun 16, 2016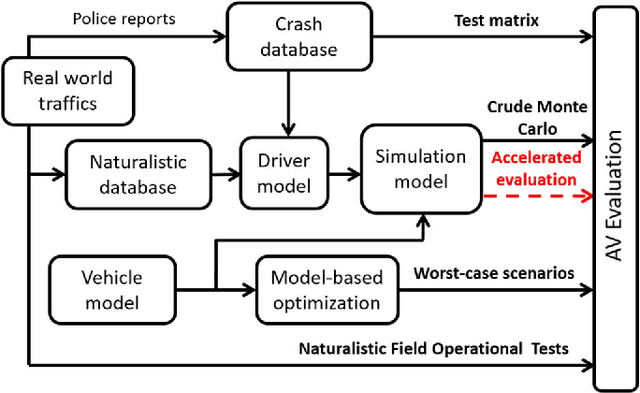
Automated vehicles (AVs) must be evaluated thoroughly before their release and deployment. A widely-used evaluation approach is the Naturalistic-Field Operational Test (N-FOT), which tests prototype vehicles directly on the public roads. Due to the low exposure to safety-critical scenarios, N-FOTs are time-consuming and expensive to conduct. In this paper, we propose an accelerated evaluation approach for AVs. The results can be used to generate motions of the primary other vehicles to accelerate the verification of AVs in simulations and controlled experiments. Frontal collision due to unsafe cut-ins is the target crash type of this paper. Human-controlled vehicles making unsafe lane changes are modeled as the primary disturbance to AVs based on data collected by the University of Michigan Safety Pilot Model Deployment Program. The cut-in scenarios are generated based on skewed statistics of collected human driver behaviors, which generate risky testing scenarios while preserving the statistical information so that the safety benefits of AVs in non-accelerated cases can be accurately estimated. The Cross Entropy method is used to recursively search for the optimal skewing parameters. The frequencies of occurrence of conflicts, crashes and injuries are estimated for a modeled automated vehicle, and the achieved accelerated rate is around 2,000 to 20,000. In other words, in the accelerated simulations, driving for 1,000 miles will expose the AV with challenging scenarios that will take about 2 to 20 million miles of real-world driving to encounter. This technique thus has the potential to reduce greatly the development and validation time for AVs.