 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImplementing Robust M-Estimators with Certifiable Factor Graph Optimization
Mar 21, 2026Parameter estimation in robotics and computer vision faces formidable challenges from both outlier contamination and nonconvex optimization landscapes. While M-estimation addresses the problem of outliers through robust loss functions, it creates severely nonconvex problems that are difficult to solve globally. Adaptive reweighting schemes provide one particularly appealing strategy for implementing M-estimation in practice: these methods solve a sequence of simpler weighted least squares (WLS) subproblems, enabling both the use of standard least squares solvers and the recovery of higher-quality estimates than simple local search. However, adaptive reweighting still crucially relies upon solving the inner WLS problems effectively, a task that remains challenging in many robotics applications due to the intrinsic nonconvexity of many common parameter spaces (e.g. rotations and poses). In this paper, we show how one can easily implement adaptively reweighted M-estimators with certifiably correct solvers for the inner WLS subproblems using only fast local optimization over smooth manifolds. Our approach exploits recent work on certifiable factor graph optimization to provide global optimality certificates for the inner WLS subproblems while seamlessly integrating into existing factor graph-based software libraries and workflows. Experimental evaluation on pose-graph optimization and landmark SLAM tasks demonstrates that our adaptively reweighted certifiable estimation approach provides higher-quality estimates than alternative local search-based methods, while scaling tractably to realistic problem sizes.
Certifiable Estimation with Factor Graphs
Mar 01, 2026Factor graphs provide a convenient modular modeling language that enables practitioners to design and deploy high-performance robotic state estimation systems by composing simple, reusable building blocks. However, inference in these models is typically performed using local optimization methods that can converge to suboptimal solutions, a serious reliability concern in safety-critical applications. Conversely, certifiable estimators based on convex relaxation can recover verifiably globally optimal solutions in many practical settings, but the computational cost of solving their large-scale relaxations necessitates specialized, structure-exploiting solvers that require substantial expertise to implement, significantly hampering practical deployment. In this paper, we show that these two paradigms, which have thus far been treated as independent in the literature, can be naturally synthesized into a unified framework for certifiable factor graph optimization. The key insight is that factor graph structure is preserved under Shor's relaxation and Burer-Monteiro factorization: applying these transformations to a QCQP with an associated factor graph representation yields a lifted problem admitting a factor graph model with identical connectivity, in which variables and factors are simple one-to-one algebraic transformations of those in the original QCQP. This structural preservation enables the Riemannian Staircase methodology for certifiable estimation to be implemented using the same mature, highly-performant factor graph libraries and workflows already ubiquitously employed throughout robotics and computer vision, making certifiable estimation as straightforward to design and deploy as conventional factor graph inference.
Actor-Action Video Classification CSC 249/449 Spring 2020 Challenge Report
Aug 18, 2020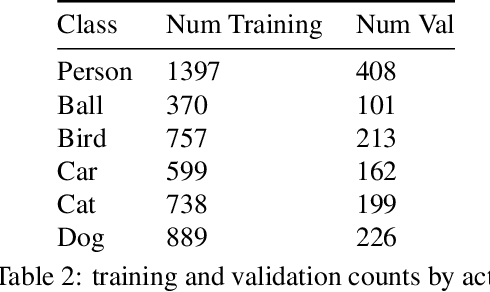
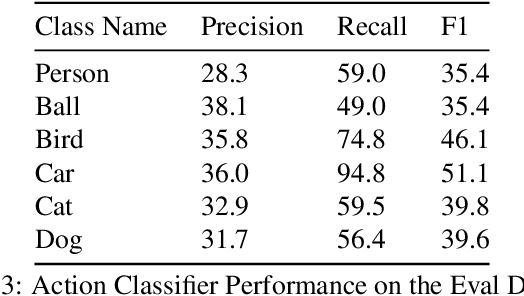
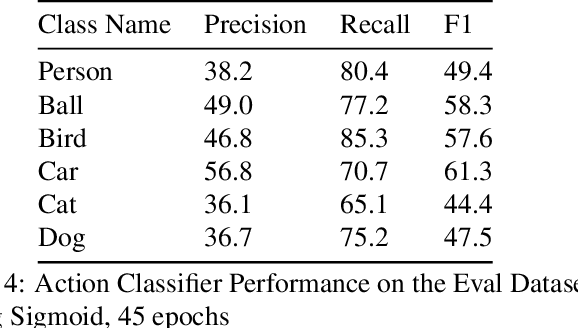
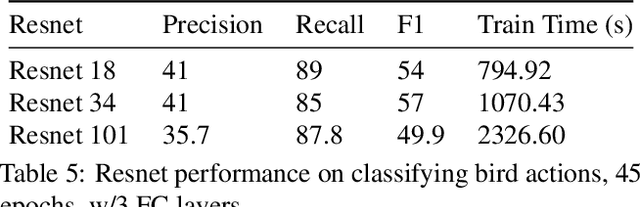
This technical report summarizes submissions and compiles from Actor-Action video classification challenge held as a final project in CSC 249/449 Machine Vision course (Spring 2020) at University of Rochester