 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConvolutions for Spatial Interaction Modeling
Apr 15, 2021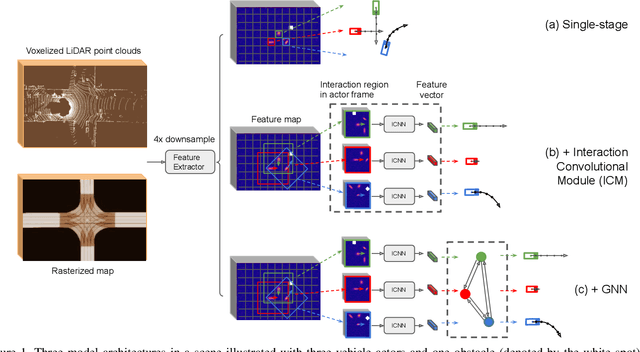

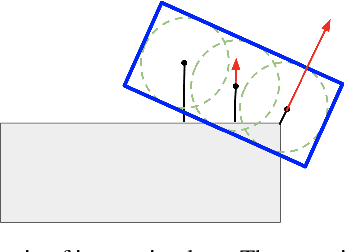
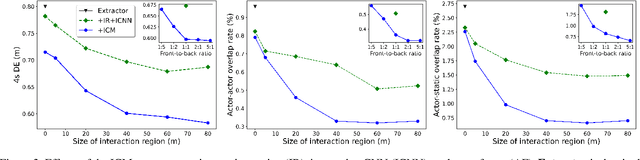
In many different fields interactions between objects play a critical role in determining their behavior. Graph neural networks (GNNs) have emerged as a powerful tool for modeling interactions, although often at the cost of adding considerable complexity and latency. In this paper, we consider the problem of spatial interaction modeling in the context of predicting the motion of actors around autonomous vehicles, and investigate alternative approaches to GNNs. We revisit convolutions and show that they can demonstrate comparable performance to graph networks in modeling spatial interactions with lower latency, thus providing an effective and efficient alternative in time-critical systems. Moreover, we propose a novel interaction loss to further improve the interaction modeling of the considered methods.
Temporally-Continuous Probabilistic Prediction using Polynomial Trajectory Parameterization
Nov 01, 2020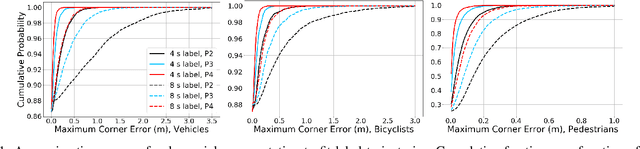
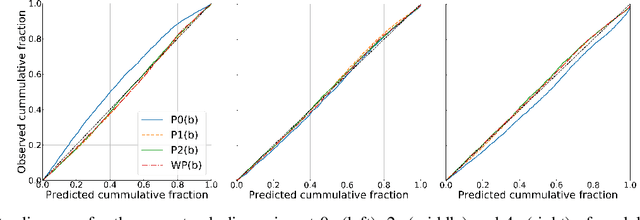
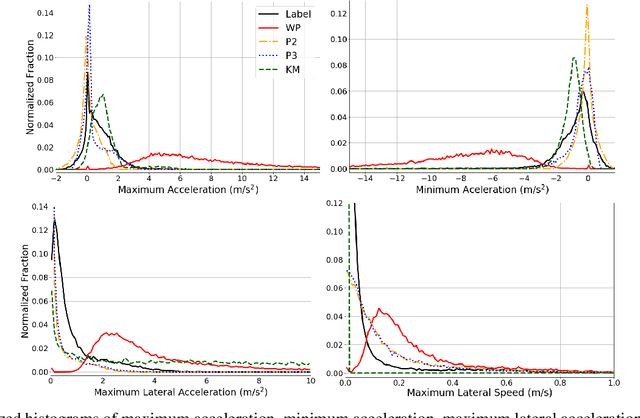
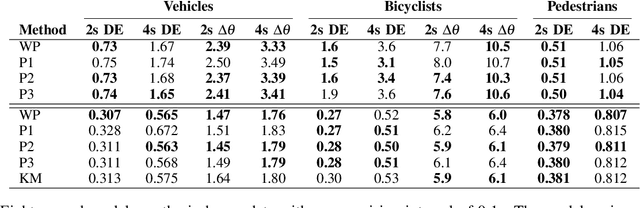
A commonly-used representation for motion prediction of actors is a sequence of waypoints (comprising positions and orientations) for each actor at discrete future time-points. While this approach is simple and flexible, it can exhibit unrealistic higher-order derivatives (such as acceleration) and approximation errors at intermediate time steps. To address this issue we propose a simple and general representation for temporally continuous probabilistic trajectory prediction that is based on polynomial trajectory parameterization. We evaluate the proposed representation on supervised trajectory prediction tasks using two large self-driving data sets. The results show realistic higher-order derivatives and better accuracy at interpolated time-points, as well as the benefits of the inferred noise distributions over the trajectories. Extensive experimental studies based on existing state-of-the-art models demonstrate the effectiveness of the proposed approach relative to other representations in predicting the future motions of vehicle, bicyclist, and pedestrian traffic actors.
Deep Kinematic Models for Physically Realistic Prediction of Vehicle Trajectories
Aug 01, 2019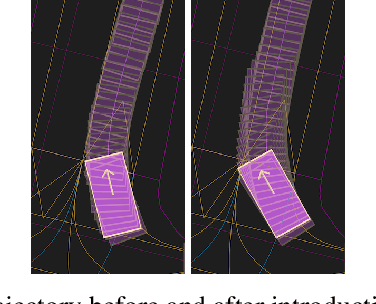
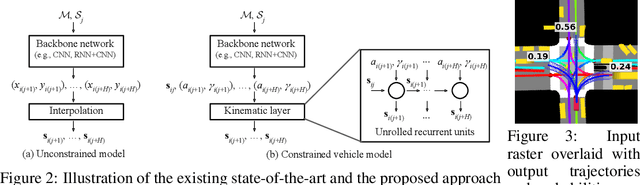
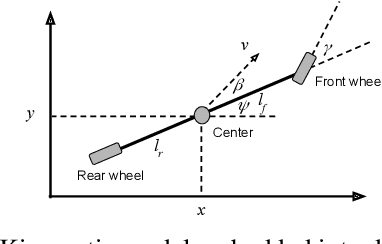
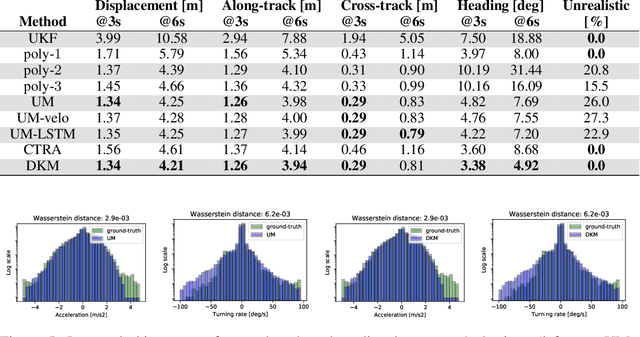
Self-driving vehicles (SDVs) hold great potential for improving traffic safety and are poised to positively affect the quality of life of millions of people. One of the critical aspects of the autonomous technology is understanding and predicting future movement of vehicles surrounding the SDV. This work presents a deep-learning-based method for physically realistic motion prediction of such traffic actors. Previous work did not explicitly encode physical realism and instead relied on the models to learn the laws of physics directly from the data, potentially resulting in implausible trajectory predictions. To account for this issue we propose a method that seamlessly combines ideas from the AI with physically grounded vehicle motion models. In this way we employ best of the both worlds, coupling powerful learning models with strong physical guarantees for their outputs. The proposed approach is general, being applicable to any type of learning method. Extensive experiments using deep convnets on large-scale, real-world data strongly indicate its benefits, outperforming the existing state-of-the-art.