 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTechnical Report on: Tripedal Dynamic Gaits for a Quadruped Robot
Mar 04, 2023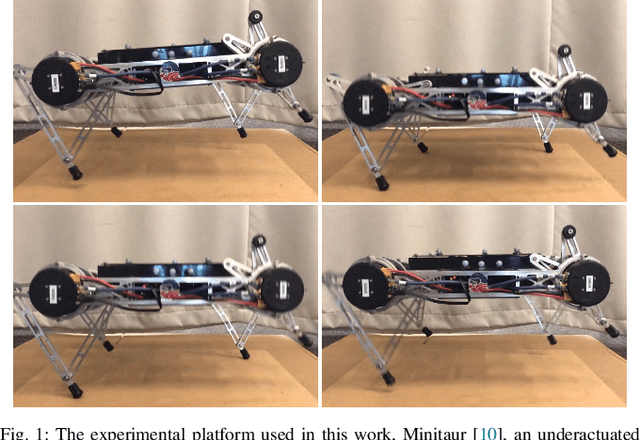
A vast number of applications for legged robots entail tasks in complex, dynamic environments. But these environments put legged robots at high risk for limb damage. This paper presents an empirical study of fault tolerant dynamic gaits designed for a quadrupedal robot suffering from a single, known ``missing'' limb. Preliminary data suggests that the featured gait controller successfully anchors a previously developed planar monopedal hopping template in the three-legged spatial machine. This compositional approach offers a useful and generalizable guide to the development of a wider range of tripedal recovery gaits for damaged quadrupedal machines.
Technical Report on: Anchoring Sagittal Plane Templates in a Spatial Quadruped
Sep 30, 2022This technical report provides a more thorough treatment of the proofs and derivations contained in a recent conference paper submission. The description of the anchoring controller is reproduced here without abridgement, and additional appendices provide a clearer account of the implementation details.
Technical Report: A Hierarchical Deliberative-Reactive System Architecture for Task and Motion Planning in Partially Known Environments
Feb 03, 2022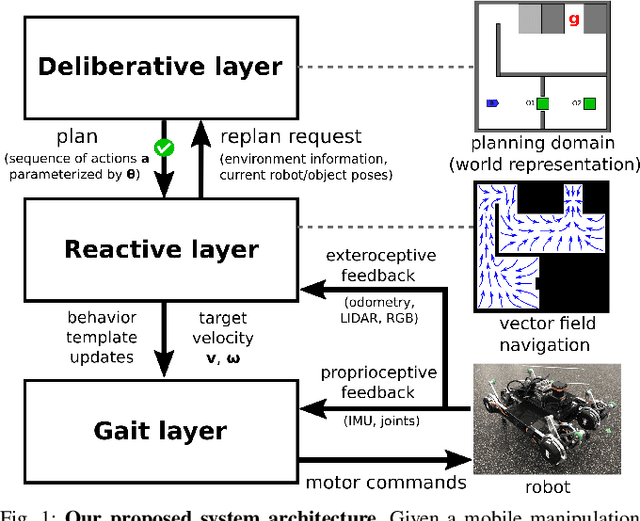
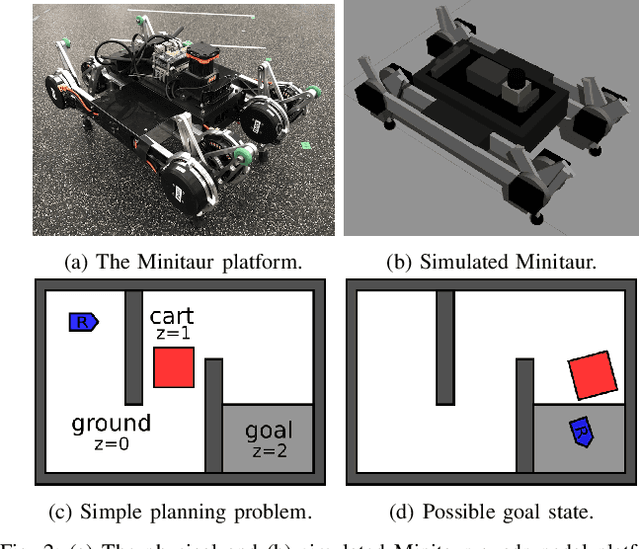
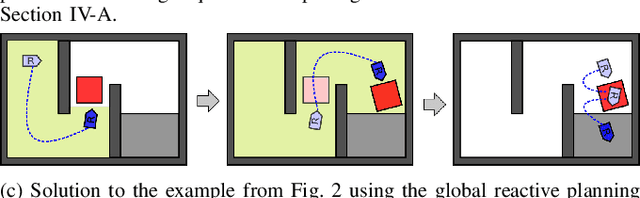
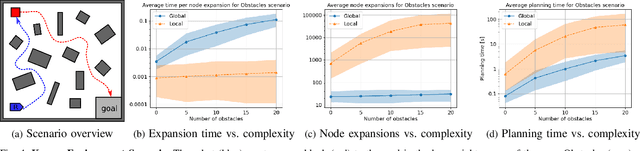
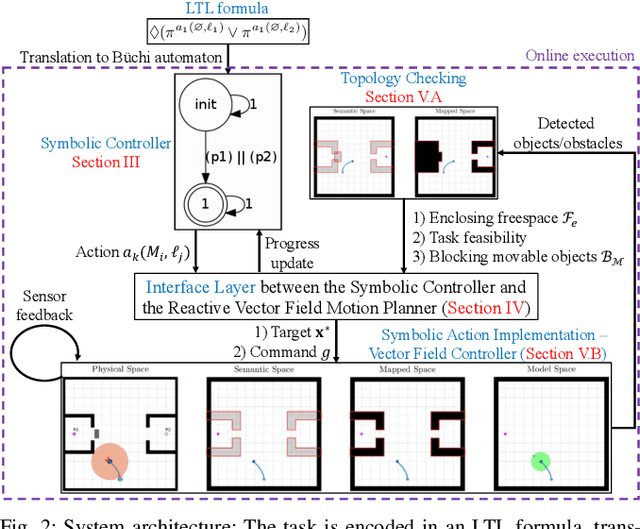
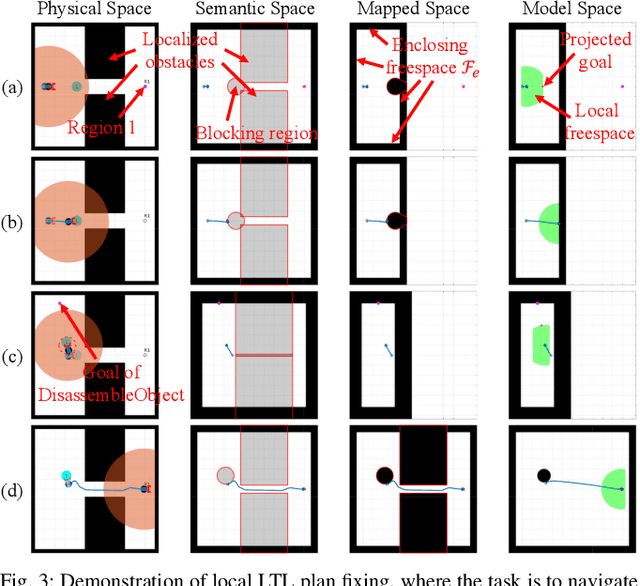
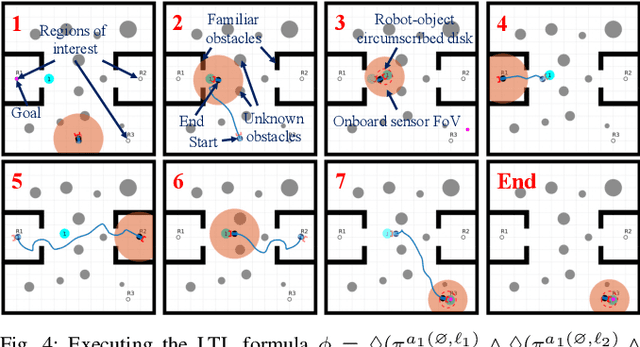
We describe a task and motion planning architecture for highly dynamic systems that combines a domain-independent sampling-based deliberative planning algorithm with a global reactive planner. We leverage the recent development of a reactive, vector field planner that provides guarantees of reachability to large regions of the environment even in the face of unknown or unforeseen obstacles. The reachability guarantees can be formalized using contracts that allow a deliberative planner to reason purely in terms of those contracts and synthesize a plan by choosing a sequence of reactive behaviors and their target configurations, without evaluating specific motion plans between targets. This reduces both the search depth at which plans will be found, and the number of samples required to ensure a plan exists, while crucially preserving correctness guarantees. The result is reduced computational cost of synthesizing plans, and increased robustness of generated plans to actuator noise, model misspecification, or unknown obstacles. Simulation studies show that our hierarchical planning and execution architecture can solve complex navigation and rearrangement tasks, even when faced with narrow passageways or incomplete world information.
Hybrid dynamical type theories for navigation
Aug 17, 2021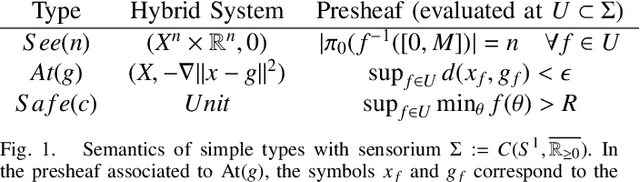
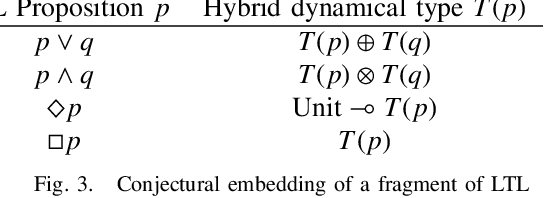
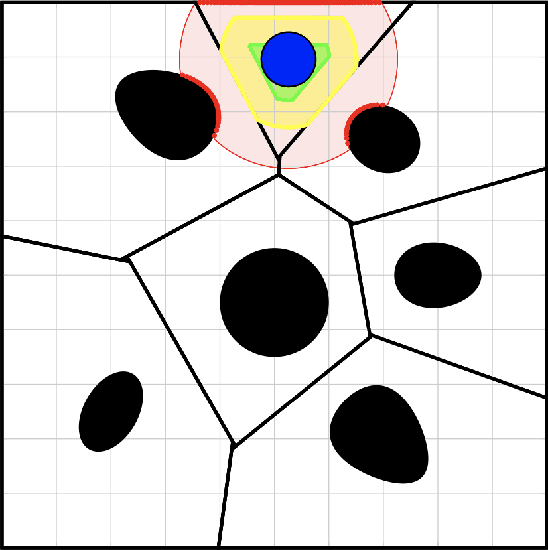
We present a hybrid dynamical type theory equipped with useful primitives for organizing and proving safety of navigational control algorithms. This type theory combines the framework of Fu--Kishida--Selinger for constructing linear dependent type theories from state-parameter fibrations with previous work on categories of hybrid systems under sequential composition. We also define a conjectural embedding of a fragment of linear-time temporal logic within our type theory, with the goal of obtaining interoperability with existing state-of-the-art tools for automatic controller synthesis from formal task specifications. As a case study, we use the type theory to organize and prove safety properties for an obstacle-avoiding navigation algorithm of Arslan--Koditschek as implemented by Vasilopoulos. Finally, we speculate on extensions of the type theory to deal with conjugacies between model and physical spaces, as well as hierarchical template-anchor relationships.
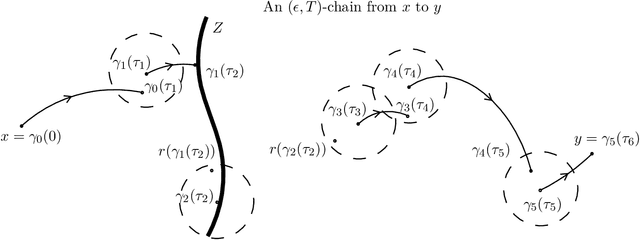
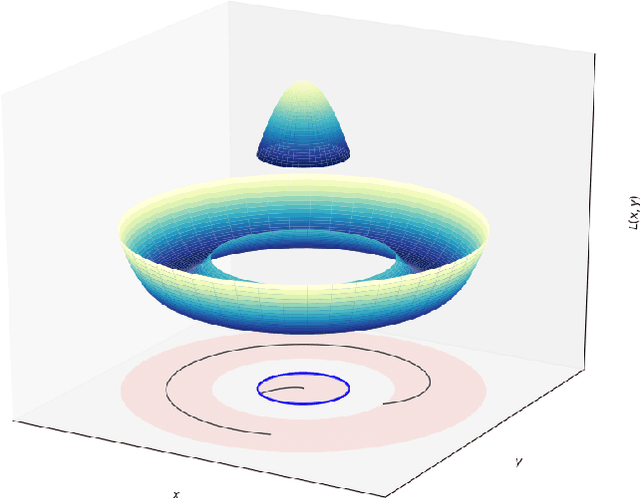
Necessary conditions for feedback stabilization and safety
Jun 01, 2021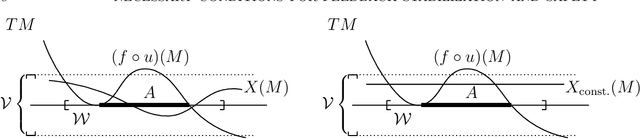
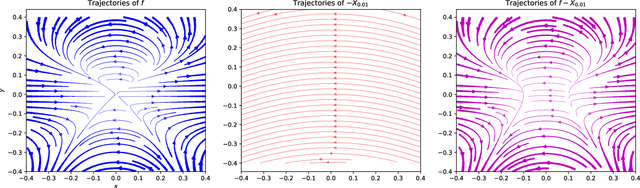
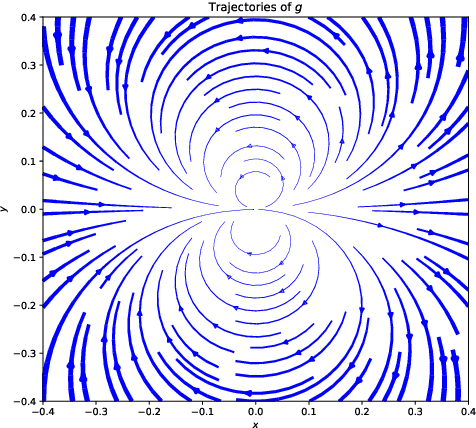
Brockett's necessary condition yields a test to determine whether a system can be made to stabilize about some operating point via continuous, purely state-dependent feedback. For many real-world systems, however, one wants to stabilize sets which are more general than a single point. One also wants to control such systems to operate safely by making obstacles and other "dangerous" sets repelling. We generalize Brockett's necessary condition to the case of stabilizing general compact subsets having a nonzero Euler characteristic. Using this generalization, we also formulate a necessary condition for the existence of "safe" control laws. We illustrate the theory in concrete examples and for some general classes of systems including a broad class of nonholonomically constrained Lagrangian systems. We also show that, for the special case of stabilizing a point, the specialization of our general stabilizability test is stronger than Brockett's.
Technical Report: Reactive Planning for Mobile Manipulation Tasks in Unexplored Semantic Environments
Nov 01, 2020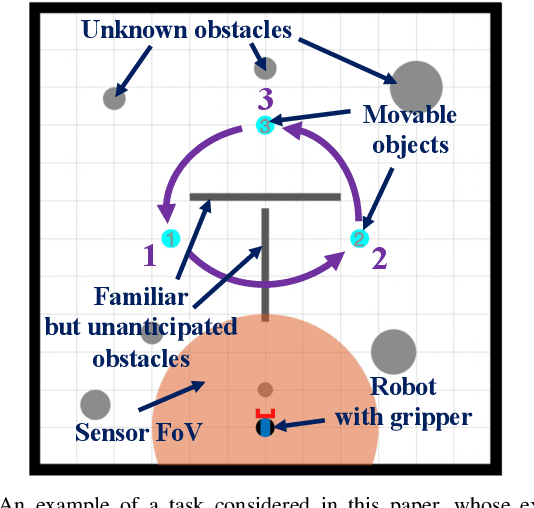
Complex manipulation tasks, such as rearrangement planning of numerous objects, are combinatorially hard problems. Existing algorithms either do not scale well or assume a great deal of prior knowledge about the environment, and few offer any rigorous guarantees. In this paper, we propose a novel hybrid control architecture for achieving such tasks with mobile manipulators. On the discrete side, we enrich a temporal logic specification with mobile manipulation primitives such as moving to a point, and grasping or moving an object. Such specifications are translated to an automaton representation, which orchestrates the physical grounding of the task to mobility or manipulation controllers. The grounding from the discrete to the continuous reactive controller is online and can respond to the discovery of unknown obstacles or decide to push out of the way movable objects that prohibit task accomplishment. Despite the problem complexity, we prove that, under specific conditions, our architecture enjoys provable completeness on the discrete side, provable termination on the continuous side, and avoids all obstacles in the environment. Simulations illustrate the efficiency of our architecture that can handle tasks of increased complexity while also responding to unknown obstacles or unanticipated adverse configurations.
Technical Report: A New Hopping Controller for Highly Dynamical Bipeds
Nov 01, 2020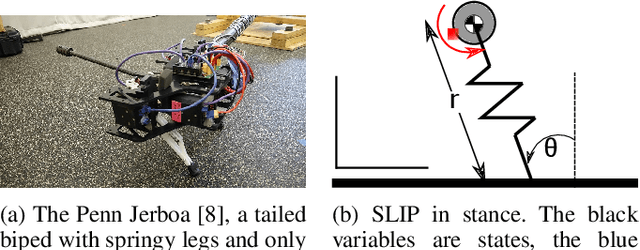
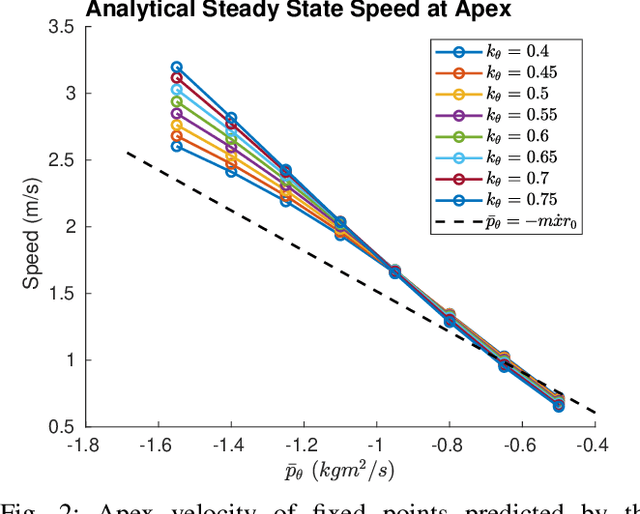
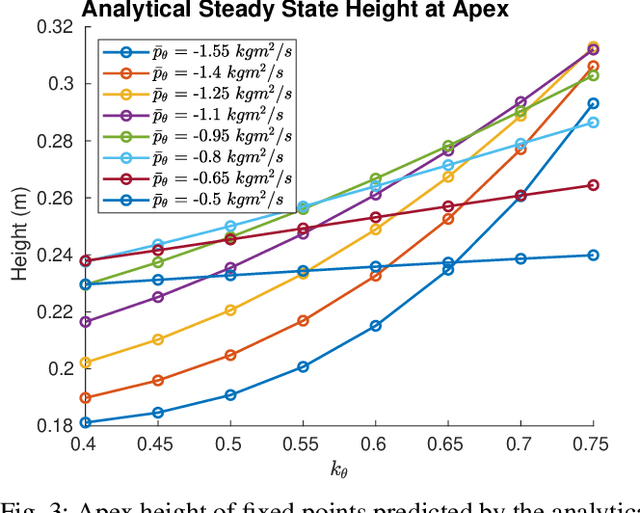
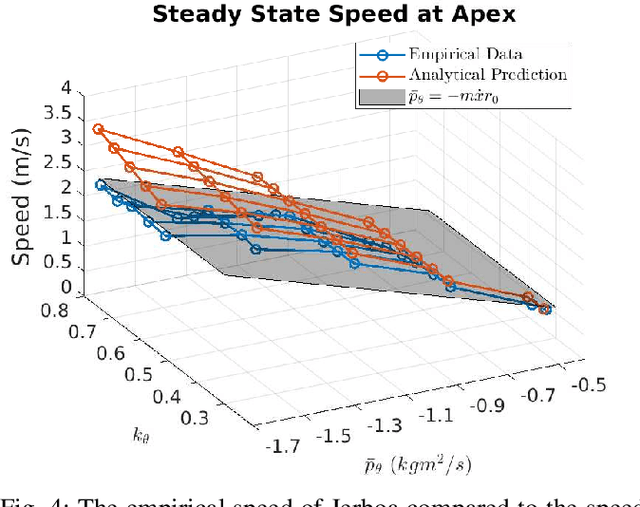
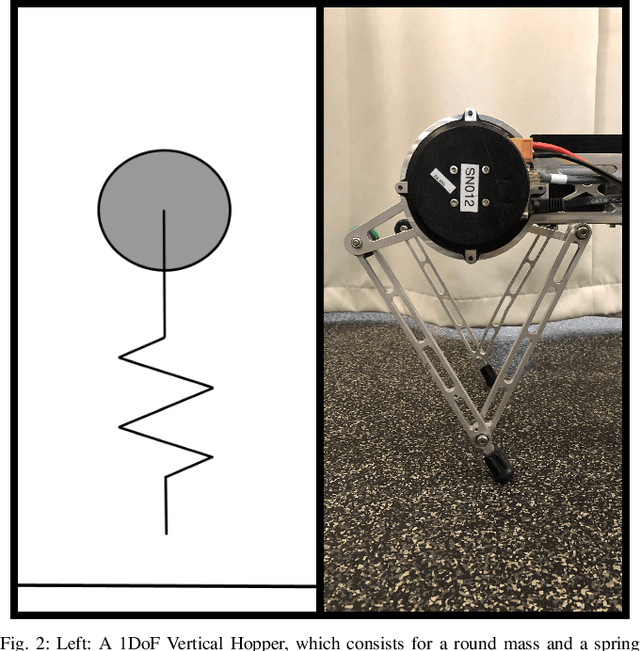
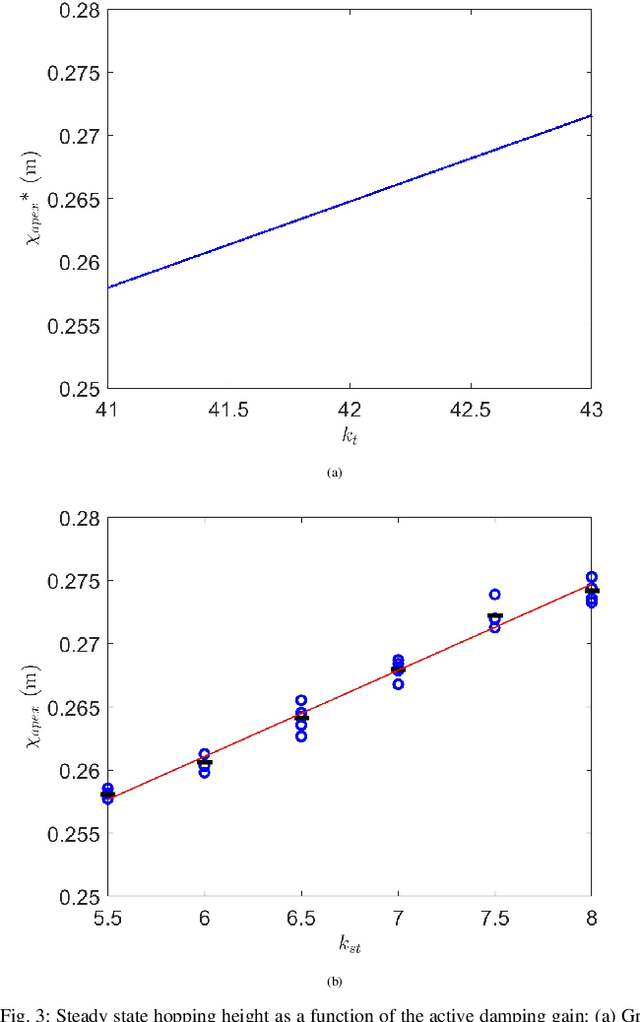
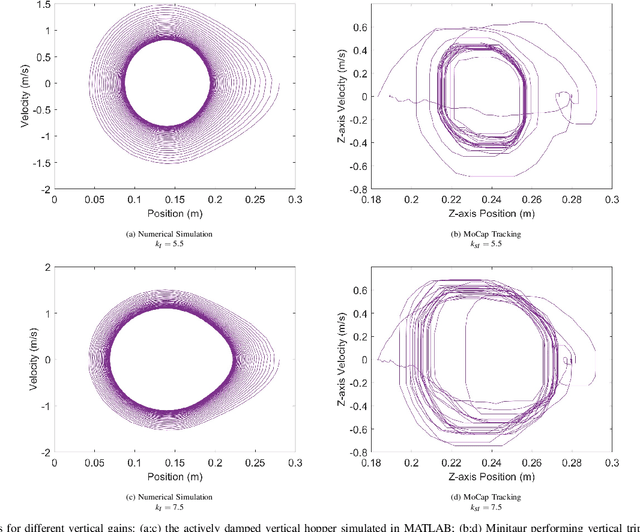
We present angle of attack control, a novel control strategy for a hip energized Penn Jerboa. The energetic losses from damping are counteracted by aligning most of the velocity at touchdown in the radial direction and the fore-aft velocity is controlled by using the hip torque to control to a target angular momentum. The control strategy results in highly asymmetric leg angle trajectories, thus avoiding the traction issues that plague hip actuated SLIP. Using a series of assumptions we find an analytical expression for the fixed points of an approximation to the hopping return map relating the design parameters to steady state gait performance. The hardware robot demonstrates stable locomotion with speeds ranging from 0.4 m/s to 2.5 m/s (2 leg lengths/s to 12.5 leg lengths/s) and heights ranging from 0.21 m to 0.27 m (1.05 leg lengths to 1.35 leg lengths). The performance of the empirical trials is well approximated by the analytical predictions.
Conley's fundamental theorem for a class of hybrid systems
May 07, 2020
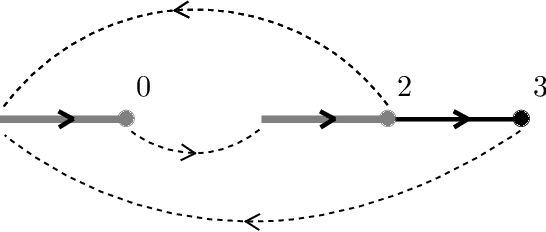
We establish versions of Conley's (i) fundamental theorem and (ii) decomposition theorem for a broad class of hybrid dynamical systems. The hybrid version of (i) asserts that a globally-defined "hybrid complete Lyapunov function" exists for every hybrid system in this class. Motivated by mechanics and control settings where physical or engineered events cause abrupt changes in a system's governing dynamics, our results apply to a large class of Lagrangian hybrid systems (with impacts) studied extensively in the robotics literature. Viewed formally, these results generalize those of Conley and Franks for continuous-time and discrete-time dynamical systems, respectively, on metric spaces. However, we furnish specific examples illustrating how our statement of sufficient conditions represents merely an early step in the longer project of establishing what formal assumptions can and cannot endow hybrid systems models with the topologically well characterized partitions of limit behavior that make Conley's theory so valuable in those classical settings.
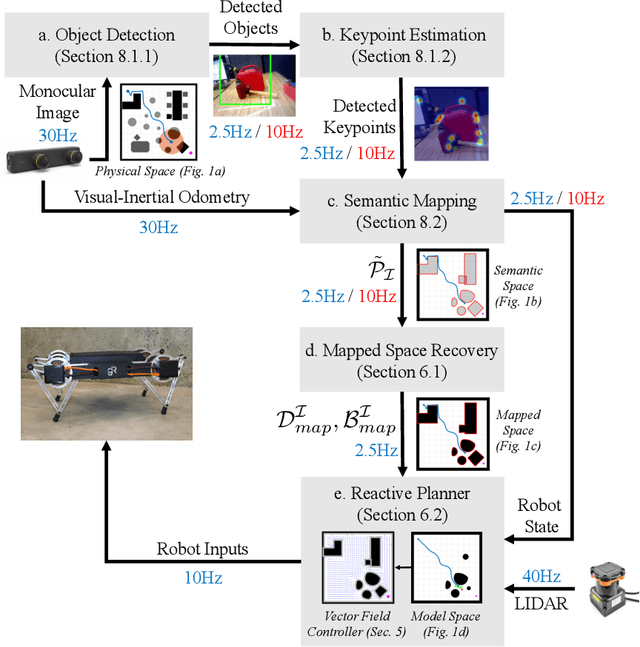
Technical Report: Reactive Semantic Planning in Unexplored Semantic Environments Using Deep Perceptual Feedback
Feb 28, 2020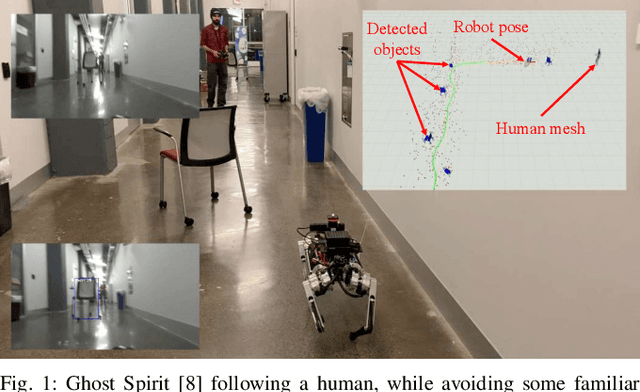


This paper presents a reactive planning system that enriches the topological representation of an environment with a tightly integrated semantic representation, achieved by incorporating and exploiting advances in deep perceptual learning and probabilistic semantic reasoning. Our architecture combines object detection with semantic SLAM, affording robust, reactive logical as well as geometric planning in unexplored environments. Moreover, by incorporating a human mesh estimation algorithm, our system is capable of reacting and responding in real time to semantically labeled human motions and gestures. New formal results allow tracking of suitably non-adversarial moving targets, while maintaining the same collision avoidance guarantees. We suggest the empirical utility of the proposed control architecture with a numerical study including comparisons with a state-of-the-art dynamic replanning algorithm, and physical implementation on both a wheeled and legged platform in different settings with both geometric and semantic goals.
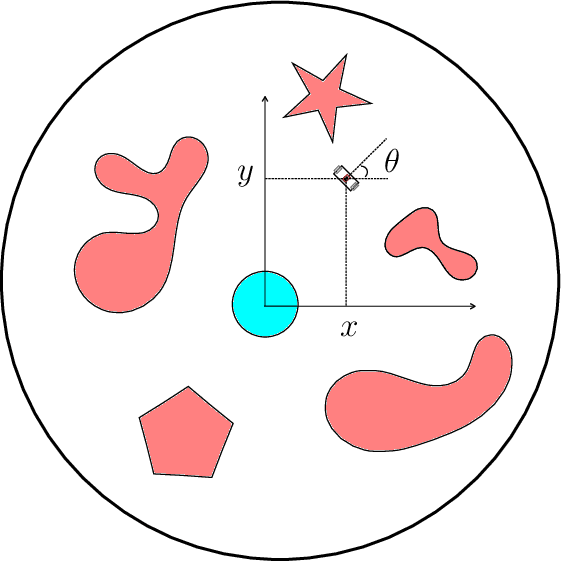
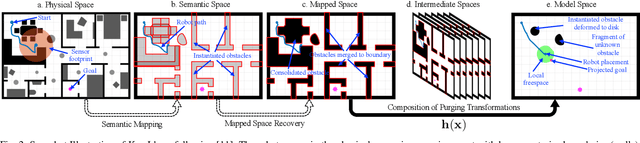
Reactive Navigation in Partially Familiar Planar Environments Using Semantic Perceptual Feedback
Feb 20, 2020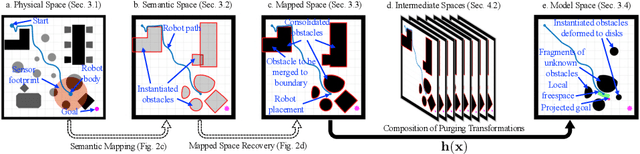
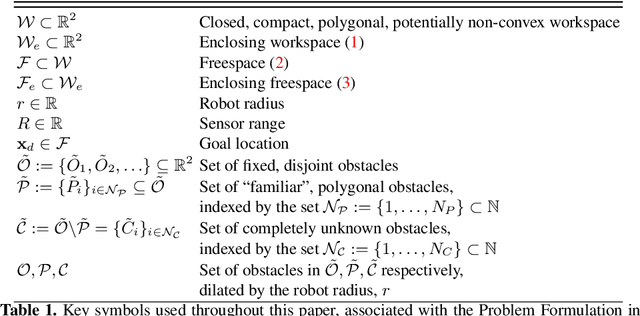
This paper solves the planar navigation problem by recourse to an online reactive scheme that exploits recent advances in SLAM and visual object recognition to recast prior geometric knowledge in terms of an offline catalogue of familiar objects. The resulting vector field planner guarantees convergence to an arbitrarily specified goal, avoiding collisions along the way with fixed but arbitrarily placed instances from the catalogue as well as completely unknown fixed obstacles so long as they are strongly convex and well separated. We illustrate the generic robustness properties of such deterministic reactive planners as well as the relatively modest computational cost of this algorithm by supplementing an extensive numerical study with physical implementation on both a wheeled and legged platform in different settings.