 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Impact to Insight: Dynamics-Aware Proprioceptive Terrain Sensing on Granular Media
Apr 02, 2026Robots that traverse natural terrain must interpret contact forces generated under highly dynamic conditions. However, most terrain characterization approaches rely on quasi-static assumptions that neglect velocity- and acceleration-dependent effects arising during impact and rapid stance transitions. In this work, we investigate granular terrain interaction during high-speed hopping and develop a physics-based framework for dynamic terrain characterization using proprioceptive sensing alone. Through controlled hopping experiments with systematically varied impact speed and leg compliance, our measurements reveal that quasi-static based assumptions lead to large discrepancies in granular terrain property estimation during high-speed hopping, particularly upon touchdown and controller-induced stiffness transitions. Velocity-dependent drag alone cannot explain these discrepancies. Instead, acceleration-dependent added-mass effects-associated with grain entrainment beneath the foot-dominate transient force responses. We integrate this force decomposition with a momentum-observer-based estimator that compensates for rigid-body inertia and gravity, and introduce an acceleration-aware weighted regression to account for increased force variance during high-acceleration events. Together, these methods enable consistent recovery of granular stiffness parameters across locomotion conditions, closely matching linear-actuator ground truth. Our results demonstrate that accurate terrain inference during high-speed locomotion requires explicit treatment of acceleration-dependent granular effects, and provide a foundation for robots to characterize complex deformable terrain during dynamic exploration of terrestrial and planetary environments.
Legged Autonomous Surface Science In Analogue Environments (LASSIE): Making Every Robotic Step Count in Planetary Exploration
Mar 20, 2026The ability to efficiently and effectively explore planetary surfaces is currently limited by the capability of wheeled rovers to traverse challenging terrains, and by pre-programmed data acquisition plans with limited in-situ flexibility. In this paper, we present two novel approaches to address these limitations: (i) high-mobility legged robots that use direct surface interactions to collect rich information about the terrain's mechanics to guide exploration; (ii) human-inspired data acquisition algorithms that enable robots to reason about scientific hypotheses and adapt exploration priorities based on incoming ground-sensing measurements. We successfully verify our approach through lab work and field deployments in two planetary analog environments. The new capability for legged robots to measure soil mechanical properties is shown to enable effective traversal of challenging terrains. When coupled with other geologic properties (e.g., composition, thermal properties, and grain size data etc), soil mechanical measurements reveal key factors governing the formation and development of geologic environments. We then demonstrate how human-inspired algorithms turn terrain-sensing robots into teammates, by supporting more flexible and adaptive data collection decisions with human scientists. Our approach therefore enables exploration of a wider range of planetary environments and new substrate investigation opportunities through integrated human-robot systems that support maximum scientific return.
Effect of Gait Design on Proprioceptive Sensing of Terrain Properties in a Quadrupedal Robot
Sep 26, 2025In-situ robotic exploration is an important tool for advancing knowledge of geological processes that describe the Earth and other Planetary bodies. To inform and enhance operations for these roving laboratories, it is imperative to understand the terramechanical properties of their environments, especially for traversing on loose, deformable substrates. Recent research suggested that legged robots with direct-drive and low-gear ratio actuators can sensitively detect external forces, and therefore possess the potential to measure terrain properties with their legs during locomotion, providing unprecedented sampling speed and density while accessing terrains previously too risky to sample. This paper explores these ideas by investigating the impact of gait on proprioceptive terrain sensing accuracy, particularly comparing a sensing-oriented gait, Crawl N' Sense, with a locomotion-oriented gait, Trot-Walk. Each gait's ability to measure the strength and texture of deformable substrate is quantified as the robot locomotes over a laboratory transect consisting of a rigid surface, loose sand, and loose sand with synthetic surface crusts. Our results suggest that with both the sensing-oriented crawling gait and locomotion-oriented trot gait, the robot can measure a consistent difference in the strength (in terms of penetration resistance) between the low- and high-resistance substrates; however, the locomotion-oriented trot gait contains larger magnitude and variance in measurements. Furthermore, the slower crawl gait can detect brittle ruptures of the surface crusts with significantly higher accuracy than the faster trot gait. Our results offer new insights that inform legged robot "sensing during locomotion" gait design and planning for scouting the terrain and producing scientific measurements on other worlds to advance our understanding of their geology and formation.
Technical Report: Reactive Semantic Planning in Unexplored Semantic Environments Using Deep Perceptual Feedback
Feb 28, 2020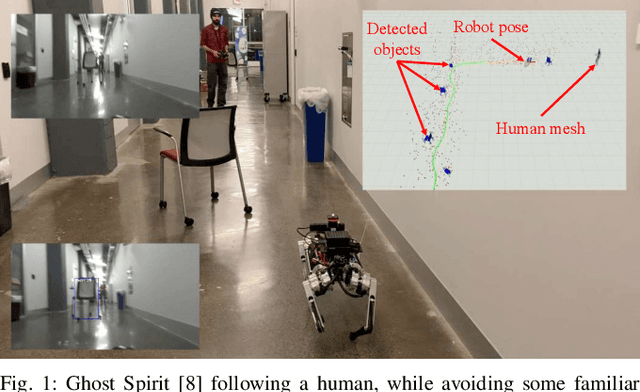
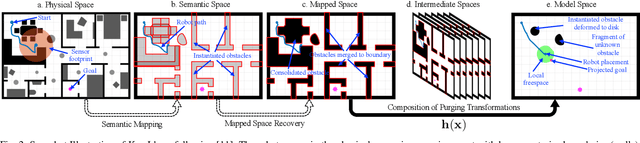


This paper presents a reactive planning system that enriches the topological representation of an environment with a tightly integrated semantic representation, achieved by incorporating and exploiting advances in deep perceptual learning and probabilistic semantic reasoning. Our architecture combines object detection with semantic SLAM, affording robust, reactive logical as well as geometric planning in unexplored environments. Moreover, by incorporating a human mesh estimation algorithm, our system is capable of reacting and responding in real time to semantically labeled human motions and gestures. New formal results allow tracking of suitably non-adversarial moving targets, while maintaining the same collision avoidance guarantees. We suggest the empirical utility of the proposed control architecture with a numerical study including comparisons with a state-of-the-art dynamic replanning algorithm, and physical implementation on both a wheeled and legged platform in different settings with both geometric and semantic goals.