 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTWLV-I: Analysis and Insights from Holistic Evaluation on Video Foundation Models
Aug 21, 2024In this work, we discuss evaluating video foundation models in a fair and robust manner. Unlike language or image foundation models, many video foundation models are evaluated with differing parameters (such as sampling rate, number of frames, pretraining steps, etc.), making fair and robust comparisons challenging. Therefore, we present a carefully designed evaluation framework for measuring two core capabilities of video comprehension: appearance and motion understanding. Our findings reveal that existing video foundation models, whether text-supervised like UMT or InternVideo2, or self-supervised like V-JEPA, exhibit limitations in at least one of these capabilities. As an alternative, we introduce TWLV-I, a new video foundation model that constructs robust visual representations for both motion- and appearance-based videos. Based on the average top-1 accuracy of linear probing on five action recognition benchmarks, pretrained only on publicly accessible datasets, our model shows a 4.6%p improvement compared to V-JEPA (ViT-L) and a 7.7%p improvement compared to UMT (ViT-L). Even when compared to much larger models, our model demonstrates a 7.2%p improvement compared to DFN (ViT-H), a 2.7%p improvement compared to V-JEPA~(ViT-H) and a 2.8%p improvement compared to InternVideo2 (ViT-g). We provide embedding vectors obtained by TWLV-I from videos of several commonly used video benchmarks, along with evaluation source code that can directly utilize these embeddings. The code is available on "https://github.com/twelvelabs-io/video-embeddings-evaluation-framework".
Symphony: Learning Realistic and Diverse Agents for Autonomous Driving Simulation
May 06, 2022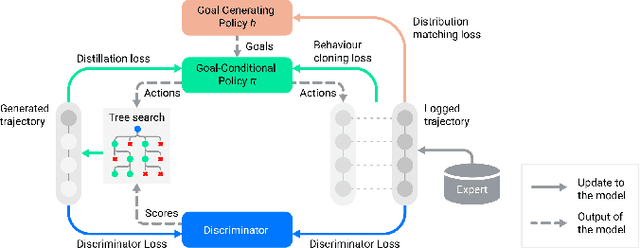
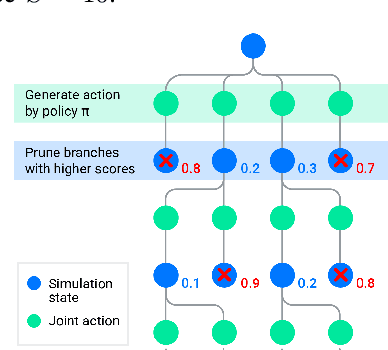
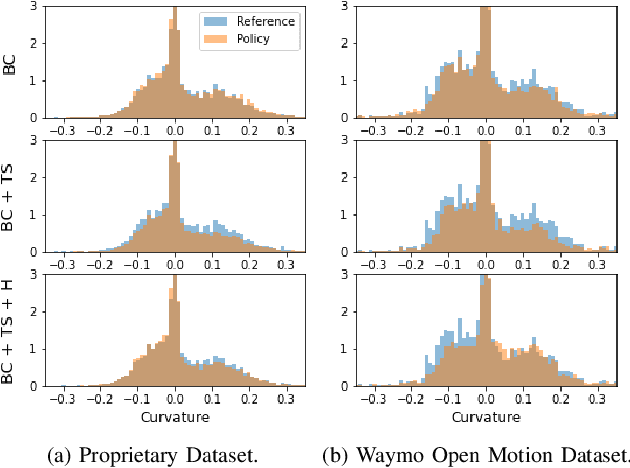
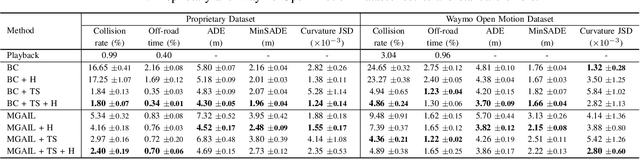
Simulation is a crucial tool for accelerating the development of autonomous vehicles. Making simulation realistic requires models of the human road users who interact with such cars. Such models can be obtained by applying learning from demonstration (LfD) to trajectories observed by cars already on the road. However, existing LfD methods are typically insufficient, yielding policies that frequently collide or drive off the road. To address this problem, we propose Symphony, which greatly improves realism by combining conventional policies with a parallel beam search. The beam search refines these policies on the fly by pruning branches that are unfavourably evaluated by a discriminator. However, it can also harm diversity, i.e., how well the agents cover the entire distribution of realistic behaviour, as pruning can encourage mode collapse. Symphony addresses this issue with a hierarchical approach, factoring agent behaviour into goal generation and goal conditioning. The use of such goals ensures that agent diversity neither disappears during adversarial training nor is pruned away by the beam search. Experiments on both proprietary and open Waymo datasets confirm that Symphony agents learn more realistic and diverse behaviour than several baselines.
QTRAN: Learning to Factorize with Transformation for Cooperative Multi-Agent Reinforcement Learning
May 14, 2019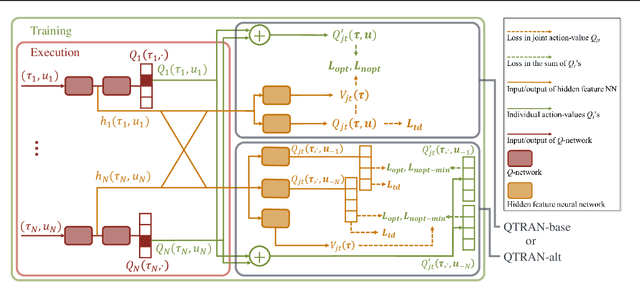
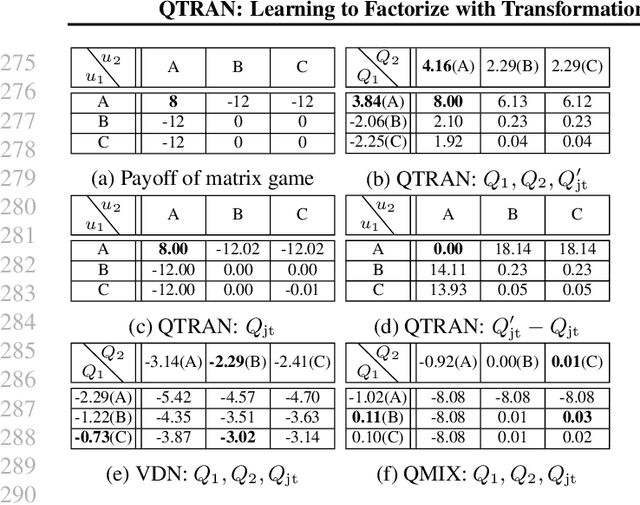
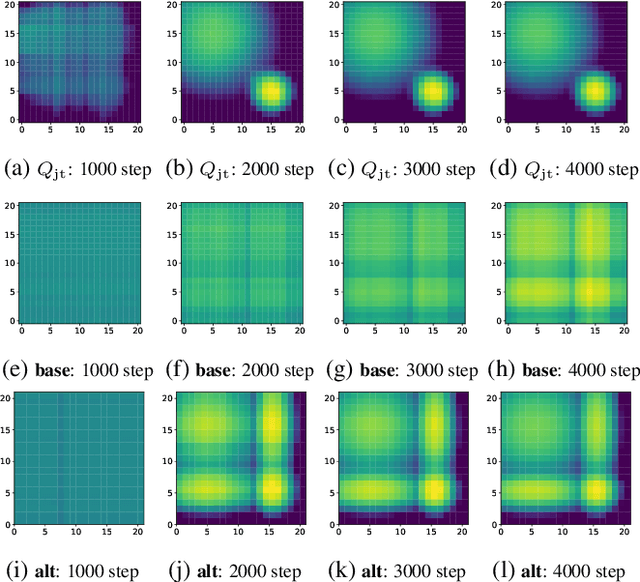
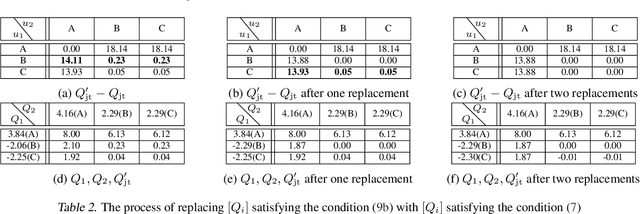
We explore value-based solutions for multi-agent reinforcement learning (MARL) tasks in the centralized training with decentralized execution (CTDE) regime popularized recently. However, VDN and QMIX are representative examples that use the idea of factorization of the joint action-value function into individual ones for decentralized execution. VDN and QMIX address only a fraction of factorizable MARL tasks due to their structural constraint in factorization such as additivity and monotonicity. In this paper, we propose a new factorization method for MARL, QTRAN, which is free from such structural constraints and takes on a new approach to transforming the original joint action-value function into an easily factorizable one, with the same optimal actions. QTRAN guarantees more general factorization than VDN or QMIX, thus covering a much wider class of MARL tasks than does previous methods. Our experiments for the tasks of multi-domain Gaussian-squeeze and modified predator-prey demonstrate QTRAN's superior performance with especially larger margins in games whose payoffs penalize non-cooperative behavior more aggressively.
Learning to Schedule Communication in Multi-agent Reinforcement Learning
Feb 05, 2019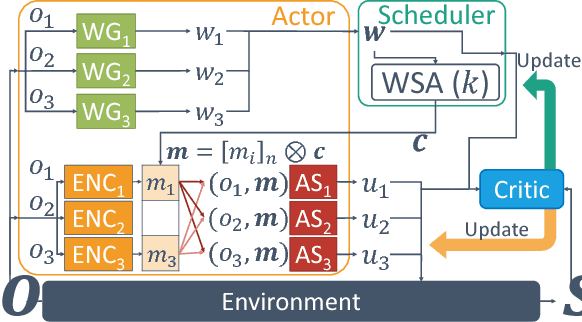
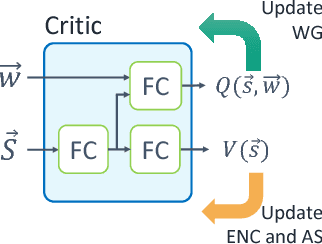
Many real-world reinforcement learning tasks require multiple agents to make sequential decisions under the agents' interaction, where well-coordinated actions among the agents are crucial to achieve the target goal better at these tasks. One way to accelerate the coordination effect is to enable multiple agents to communicate with each other in a distributed manner and behave as a group. In this paper, we study a practical scenario when (i) the communication bandwidth is limited and (ii) the agents share the communication medium so that only a restricted number of agents are able to simultaneously use the medium, as in the state-of-the-art wireless networking standards. This calls for a certain form of communication scheduling. In that regard, we propose a multi-agent deep reinforcement learning framework, called SchedNet, in which agents learn how to schedule themselves, how to encode the messages, and how to select actions based on received messages. SchedNet is capable of deciding which agents should be entitled to broadcasting their (encoded) messages, by learning the importance of each agent's partially observed information. We evaluate SchedNet against multiple baselines under two different applications, namely, cooperative communication and navigation, and predator-prey. Our experiments show a non-negligible performance gap between SchedNet and other mechanisms such as the ones without communication and with vanilla scheduling methods, e.g., round robin, ranging from 32% to 43%.