 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaTT: Text-Guided Instrument Timbre Transfer with Target-Adaptive Structural Control
Jun 14, 2026This paper addresses timbral ambiguity in instrument timbre transfer under fine-grained structural conditions. We argue this issue stems from instrument-specific expressive details in these conditions, which conflict with the target timbral properties. For example, imposing a violin's pitch-dominant vibrato contours onto a flute, which naturally exhibits loudness-dominant vibrato, impairs timbral fidelity. We propose AdaTT, a target-adaptive system that ensures high timbral fidelity across diverse timbre transfer scenarios within the ControlNet scheme. It selectively scales the frame-wise influence of pitch and loudness controls via text prompts to match the target instrument's identity. We also present a semi-automatic data construction pipeline to teach the model which expressive details to transform or preserve. Results show AdaTT achieves superior timbral fidelity and naturalness while retaining score-level content. Audio samples are available at https://dabinkim0.github.io/adatt/.
Safe Embodied AI for Long-horizon Tasks: A Cross-layer Analysis of Robotic Manipulation
Jun 04, 2026Embodied AI systems are increasingly expected to reason and act over extended horizons in physical environments. This growing capability brings safety to the foreground, because failures in the physical world can harm people, damage objects, and disrupt workplaces. Although safe embodied AI has attracted substantial attention, the literature remains fragmented across planning, policy design, and runtime execution. Long-horizon robotic manipulation is a particularly revealing anchor domain for this problem because semantic misgrounding, subtask-level error propagation, execution drift, and contact-rich physical risk can accumulate within the same closed-loop system. This survey therefore provides a structured review of safety in long-horizon robotic manipulation from an embodied AI perspective. We organize the literature by intervention locus, covering planning-time, policy-time, and execution-time safety, and we analyze the strength of the evidence that each line of work provides, distinguishing formal guarantees, statistical support, and empirical safety heuristics. This framework clarifies the distinct roles of backbone capability papers, direct safety mechanisms, and benchmark or evaluation studies, while exposing where current safety claims are well supported and where they remain indirect. We identify persistent gaps, including limited evidence for policy-time safety, weak formal support for contact-rich long-horizon manipulation, immature uncertainty-triggered intervention, and a shortage of manipulation-specific safety benchmarks. We conclude by outlining research directions for cross-layer assurance, evaluation design, and safer deployment of long-horizon robotic agents in real-world settings.
Geometry-Correct Diffusion Posterior Sampling with Denoiser-Pullback Curvature Guidance and Manifold-Aligned Damping
May 27, 2026Diffusion posterior sampling conditions diffusion priors on measurements, but data-consistency updates are typically scaled by hand-tuned guidance weights and can destabilize sampling under stiff, operator-dependent curvature. We replace scalar guidance with a per-noise-level damped Gauss--Newton correction computed in diffusion-state coordinates. The correction pulls likelihood gradients back through the denoiser, uses a one-sided curvature model that avoids forward denoiser Jacobians, and applies diffusion-calibrated rank-one damping aligned with the denoiser residual. Each correction is solved with matrix-free GMRES using automatic differentiation, and sampling proceeds with a variance-preserving Langevin transition with a closed-form drift/noise split. On FFHQ and ImageNet across inverse problems, it achieves competitive PSNR/SSIM/LPIPS while running markedly faster than most of the compared baselines; on accelerated MRI reconstruction, it achieves the best PSNR/SSIM among the compared baselines.
* Code: https://github.com/Seunghyeok0715/CLAMP
ReaDy-Go: Real-to-Sim Dynamic 3D Gaussian Splatting Simulation for Environment-Specific Visual Navigation with Moving Obstacles
Feb 14, 2026Visual navigation models often struggle in real-world dynamic environments due to limited robustness to the sim-to-real gap and the difficulty of training policies tailored to target deployment environments (e.g., households, restaurants, and factories). Although real-to-sim navigation simulation using 3D Gaussian Splatting (GS) can mitigate these challenges, prior GS-based works have considered only static scenes or non-photorealistic human obstacles built from simulator assets, despite the importance of safe navigation in dynamic environments. To address these issues, we propose ReaDy-Go, a novel real-to-sim simulation pipeline that synthesizes photorealistic dynamic scenarios in target environments by augmenting a reconstructed static GS scene with dynamic human GS obstacles, and trains navigation policies using the generated datasets. The pipeline provides three key contributions: (1) a dynamic GS simulator that integrates static scene GS with a human animation module, enabling the insertion of animatable human GS avatars and the synthesis of plausible human motions from 2D trajectories, (2) a navigation dataset generation framework that leverages the simulator along with a robot expert planner designed for dynamic GS representations and a human planner, and (3) robust navigation policies to both the sim-to-real gap and moving obstacles. The proposed simulator generates thousands of photorealistic navigation scenarios with animatable human GS avatars from arbitrary viewpoints. ReaDy-Go outperforms baselines across target environments in both simulation and real-world experiments, demonstrating improved navigation performance even after sim-to-real transfer and in the presence of moving obstacles. Moreover, zero-shot sim-to-real deployment in an unseen environment indicates its generalization potential. Project page: https://syeon-yoo.github.io/ready-go-site/.
Personalized Autonomous Driving via Optimal Control with Clearance Constraints from Questionnaires
Feb 09, 2026Driving without considering the preferred separation distance from surrounding vehicles may cause discomfort for users. To address this limitation, we propose a planning framework that explicitly incorporates user preferences regarding the desired level of safe clearance from surrounding vehicles. We design a questionnaire purposefully tailored to capture user preferences relevant to our framework, while minimizing unnecessary questions. Specifically, the questionnaire considers various interaction-relevant factors, including the surrounding vehicle's size, speed, position, and maneuvers of surrounding vehicles, as well as the maneuvers of the ego vehicle. The response indicates the user-preferred clearance for the scenario defined by the question and is incorporated as constraints in the optimal control problem. However, it is impractical to account for all possible scenarios that may arise in a driving environment within a single optimal control problem, as the resulting computational complexity renders real-time implementation infeasible. To overcome this limitation, we approximate the original problem by decomposing it into multiple subproblems, each dealing with one fixed scenario. We then solve these subproblems in parallel and select one using the cost function from the original problem. To validate our work, we conduct simulations using different user responses to the questionnaire. We assess how effectively our planner reflects user preferences compared to preference-agnostic baseline planners by measuring preference alignment.
HERE: Hierarchical Active Exploration of Radiance Field with Epistemic Uncertainty Minimization
Jan 12, 2026We present HERE, an active 3D scene reconstruction framework based on neural radiance fields, enabling high-fidelity implicit mapping. Our approach centers around an active learning strategy for camera trajectory generation, driven by accurate identification of unseen regions, which supports efficient data acquisition and precise scene reconstruction. The key to our approach is epistemic uncertainty quantification based on evidential deep learning, which directly captures data insufficiency and exhibits a strong correlation with reconstruction errors. This allows our framework to more reliably identify unexplored or poorly reconstructed regions compared to existing methods, leading to more informed and targeted exploration. Additionally, we design a hierarchical exploration strategy that leverages learned epistemic uncertainty, where local planning extracts target viewpoints from high-uncertainty voxels based on visibility for trajectory generation, and global planning uses uncertainty to guide large-scale coverage for efficient and comprehensive reconstruction. The effectiveness of the proposed method in active 3D reconstruction is demonstrated by achieving higher reconstruction completeness compared to previous approaches on photorealistic simulated scenes across varying scales, while a hardware demonstration further validates its real-world applicability.
Adaptive 3D Reconstruction via Diffusion Priors and Forward Curvature-Matching Likelihood Updates
Nov 09, 2025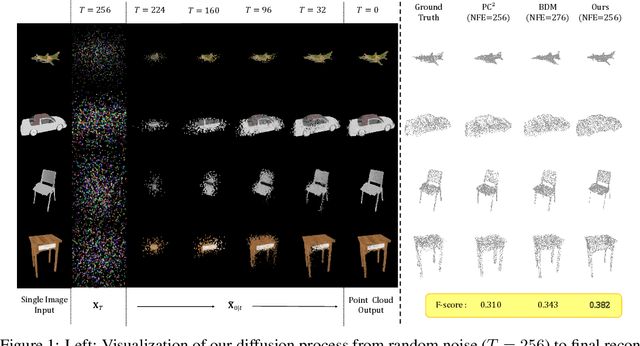
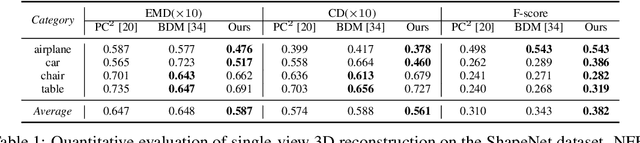
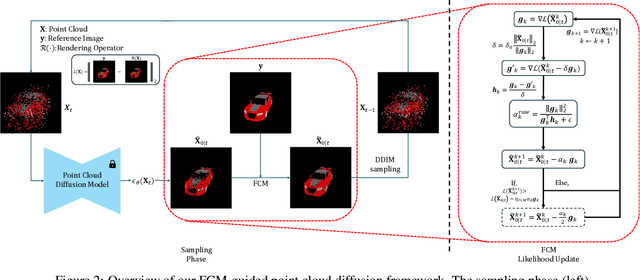
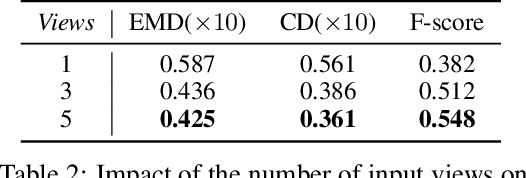
Reconstructing high-quality point clouds from images remains challenging in computer vision. Existing generative-model-based approaches, particularly diffusion-model approaches that directly learn the posterior, may suffer from inflexibility -- they require conditioning signals during training, support only a fixed number of input views, and need complete retraining for different measurements. Recent diffusion-based methods have attempted to address this by combining prior models with likelihood updates, but they rely on heuristic fixed step sizes for the likelihood update that lead to slow convergence and suboptimal reconstruction quality. We advance this line of approach by integrating our novel Forward Curvature-Matching (FCM) update method with diffusion sampling. Our method dynamically determines optimal step sizes using only forward automatic differentiation and finite-difference curvature estimates, enabling precise optimization of the likelihood update. This formulation enables high-fidelity reconstruction from both single-view and multi-view inputs, and supports various input modalities through simple operator substitution -- all without retraining. Experiments on ShapeNet and CO3D datasets demonstrate that our method achieves superior reconstruction quality at matched or lower NFEs, yielding higher F-score and lower CD and EMD, validating its efficiency and adaptability for practical applications. Code is available at https://github.com/Seunghyeok0715/FCM
Enhancing Feature Tracking Reliability for Visual Navigation using Real-Time Safety Filter
Feb 03, 2025



Vision sensors are extensively used for localizing a robot's pose, particularly in environments where global localization tools such as GPS or motion capture systems are unavailable. In many visual navigation systems, localization is achieved by detecting and tracking visual features or landmarks, which provide information about the sensor's relative pose. For reliable feature tracking and accurate pose estimation, it is crucial to maintain visibility of a sufficient number of features. This requirement can sometimes conflict with the robot's overall task objective. In this paper, we approach it as a constrained control problem. By leveraging the invariance properties of visibility constraints within the robot's kinematic model, we propose a real-time safety filter based on quadratic programming. This filter takes a reference velocity command as input and produces a modified velocity that minimally deviates from the reference while ensuring the information score from the currently visible features remains above a user-specified threshold. Numerical simulations demonstrate that the proposed safety filter preserves the invariance condition and ensures the visibility of more features than the required minimum. We also validated its real-world performance by integrating it into a visual simultaneous localization and mapping (SLAM) algorithm, where it maintained high estimation quality in challenging environments, outperforming a simple tracking controller.
Video-Foley: Two-Stage Video-To-Sound Generation via Temporal Event Condition For Foley Sound
Aug 21, 2024
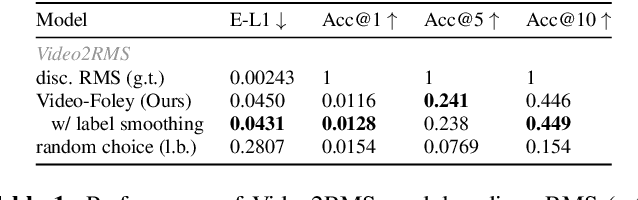


Foley sound synthesis is crucial for multimedia production, enhancing user experience by synchronizing audio and video both temporally and semantically. Recent studies on automating this labor-intensive process through video-to-sound generation face significant challenges. Systems lacking explicit temporal features suffer from poor controllability and alignment, while timestamp-based models require costly and subjective human annotation. We propose Video-Foley, a video-to-sound system using Root Mean Square (RMS) as a temporal event condition with semantic timbre prompts (audio or text). RMS, a frame-level intensity envelope feature closely related to audio semantics, ensures high controllability and synchronization. The annotation-free self-supervised learning framework consists of two stages, Video2RMS and RMS2Sound, incorporating novel ideas including RMS discretization and RMS-ControlNet with a pretrained text-to-audio model. Our extensive evaluation shows that Video-Foley achieves state-of-the-art performance in audio-visual alignment and controllability for sound timing, intensity, timbre, and nuance. Code, model weights, and demonstrations are available on the accompanying website. (https://jnwnlee.github.io/video-foley-demo)
Visibility-Constrained Control of Multirotor via Reference Governor
Aug 10, 2023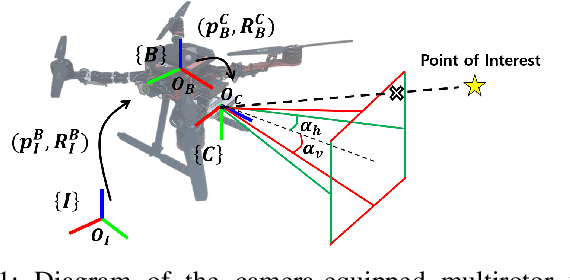
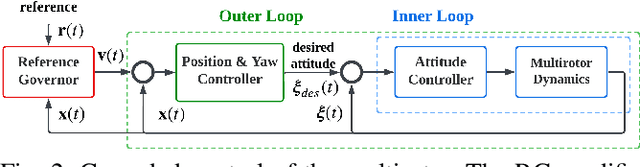
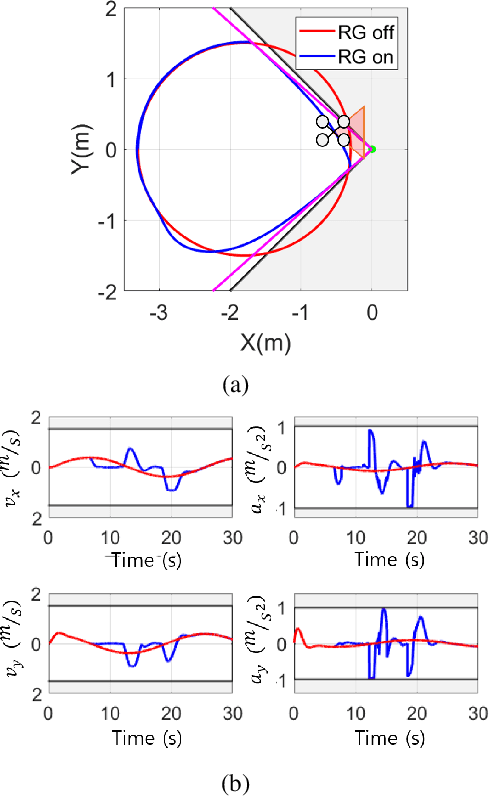
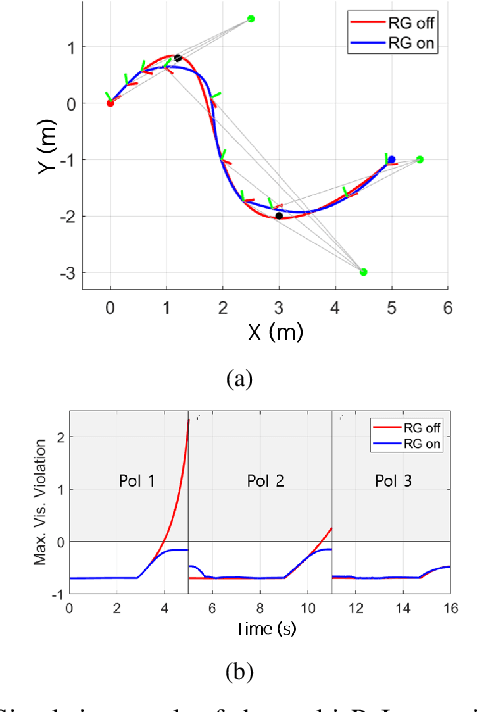
For safe vision-based control applications, perception-related constraints have to be satisfied in addition to other state constraints. In this paper, we deal with the problem where a multirotor equipped with a camera needs to maintain the visibility of a point of interest while tracking a reference given by a high-level planner. We devise a method based on reference governor that, differently from existing solutions, is able to enforce control-level visibility constraints with theoretically assured feasibility. To this end, we design a new type of reference governor for linear systems with polynomial constraints which is capable of handling time-varying references. The proposed solution is implemented online for the real-time multirotor control with visibility constraints and validated with simulations and an actual hardware experiment.