 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Distributed Trajectory Planning for Quadrotor Swarm with Feasibility Guarantee using Linear Safe Corridor
Sep 19, 2021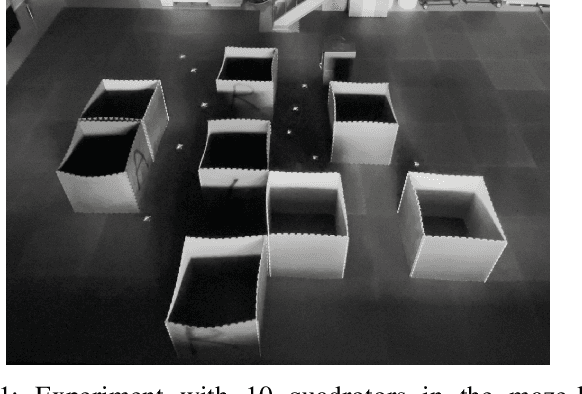
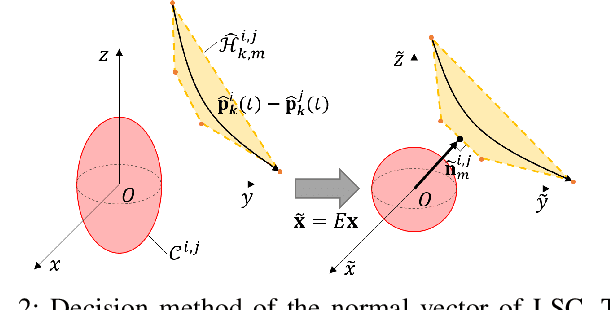
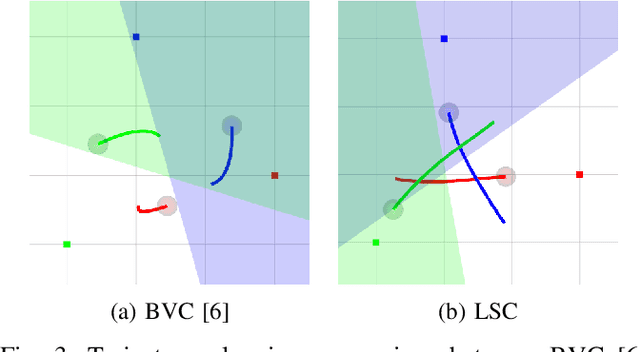
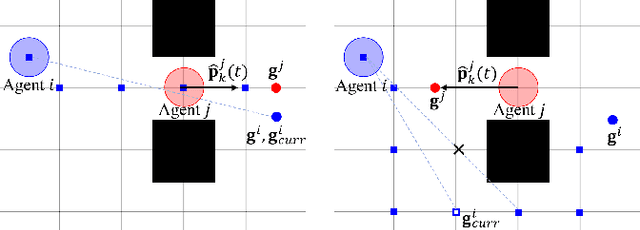
This paper presents a new online multi-agent trajectory planning algorithm that guarantees to generate safe, dynamically feasible trajectories in a cluttered environment. The proposed algorithm utilizes a linear safe corridor (LSC) to formulate the distributed trajectory optimization problem with only feasible constraints, so it does not resort to slack variables or soft constraints to avoid optimization failure. Also, we adopt a priority-based goal planning method to prevent the deadlock without additional communication for decision making. The proposed algorithm can compute the trajectories for 60 agents on average 15.5 ms per agent with an Intel i7 laptop and can find the trajectory that reaches the goal without deadlock in both random forest and indoor space. We validated safety and operability of the proposed algorithm through a real flight test with ten quadrotors in a maze-like environment.
Topology-Guided Path Planning for Reliable Visual Navigation of MAVs
Jul 19, 2021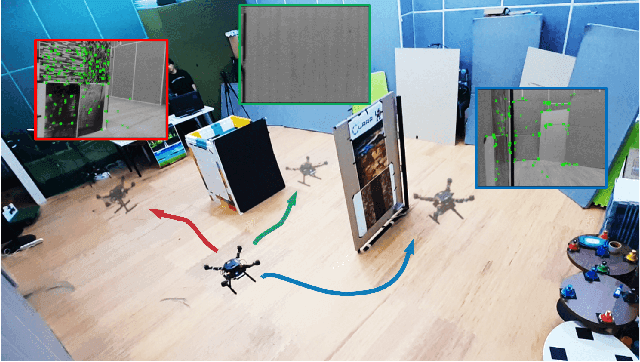
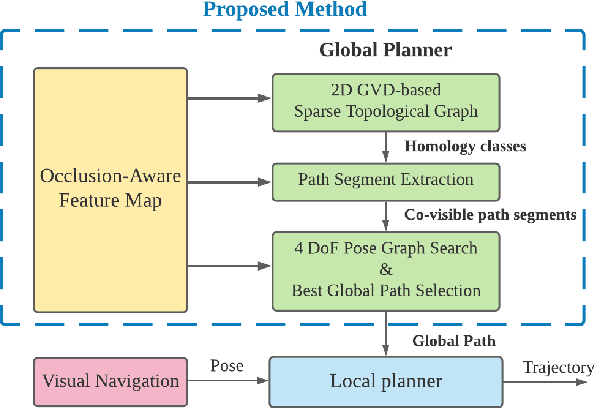
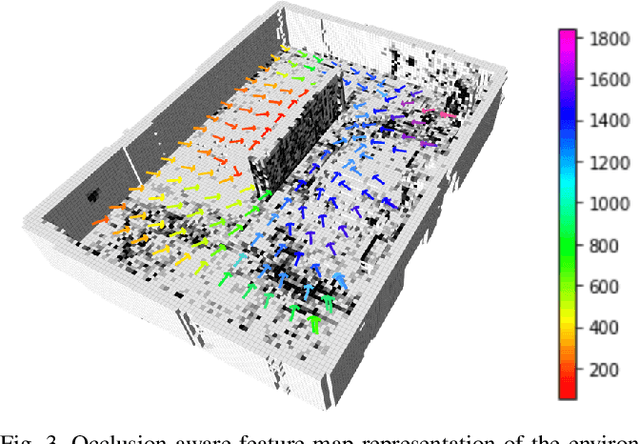
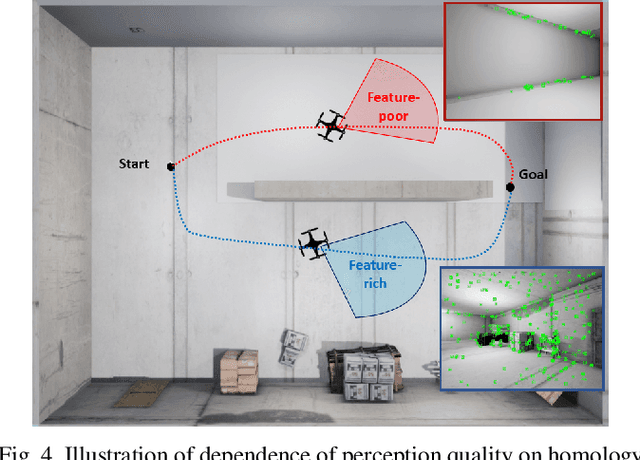
Visual navigation has been widely used for state estimation of micro aerial vehicles (MAVs). For stable visual navigation, MAVs should generate perception-aware paths which guarantee enough visible landmarks. Many previous works on perception-aware path planning focused on sampling-based planners. However, they may suffer from sample inefficiency, which leads to computational burden for finding a global optimal path. To address this issue, we suggest a perception-aware path planner which utilizes topological information of environments. Since the topological class of a path and visible landmarks during traveling the path are closely related, the proposed algorithm checks distinctive topological classes to choose the class with abundant visual information. Topological graph is extracted from the generalized Voronoi diagram of the environment and initial paths with different topological classes are found. To evaluate the perception quality of the classes, we divide the initial path into discrete segments where the points in each segment share similar visual information. The optimal class with high perception quality is selected, and a graph-based planner is utilized to generate path within the class. With simulations and real-world experiments, we confirmed that the proposed method could guarantee accurate visual navigation compared with the perception-agnostic method while showing improved computational efficiency than the sampling-based perception-aware planner.