 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuality-Aware Exploration Budget Allocation for Cooperative Multi-Agent Reinforcement Learning
May 03, 2026Cooperative multi-agent reinforcement learning (MARL) requires agents to discover joint strategies in a combinatorially large state-action space, yet effective coordination configurations are exceedingly rare. Intrinsic motivation, which augments task rewards with novelty bonuses, is a popular approach for driving exploration, but its effectiveness hinges on the exploration intensity $β$, where too large a value overwhelms the task signal and causes coordination collapse, while too small a value prevents discovery of rare strategies. We address two complementary challenges: adapting $β$ globally over training, and allocating the exploration budget across agents whose intrinsic reward signals vary in reliability. Our framework combines a return-conditioned sigmoid schedule (RCB) for global intensity control with a per-agent Reward Signal Quality (RSQ) metric that concentrates the exploration budget on agents with reliable signals. The core insight is that agents receiving noisy intrinsic rewards should explore less aggressively, and this allocation can be determined automatically from signal-to-noise statistics. Successor Distance (SD), a quasimetric intrinsic reward, naturally produces distinguishable per-agent signal quality, completing the framework with convergence and ordering preservation guarantees. On seven cooperative benchmarks (MPE, SMAX, MABrax), our method achieves top-tier returns across all environments.
QP Chaser: Polynomial Trajectory Generation for Autonomous Aerial Tracking
Feb 28, 2023Maintaining the visibility of the targets is one of the major objectives of aerial tracking applications. This paper proposes QP Chaser, a trajectory planning pipeline that can enhance the visibility of single- and dual-target in both static and dynamic environments. As the name suggests, the proposed planner generates a target-visible trajectory via quadratic programming problems. First, the predictor forecasts the reachable sets of moving objects with a sample-and-check strategy considering obstacles. Subsequently, the trajectory planner reinforces the visibility of targets with consideration of 1) path topology and 2) reachable sets of targets and obstacles. We define a target-visible region (TVR) with topology analysis of not only static obstacles but also dynamic obstacles, and it reflects reachable sets of moving targets and obstacles to maintain the whole body of the target within the camera image robustly and ceaselessly. The online performance of the proposed planner is validated in multiple scenarios, including high-fidelity simulations and real-world experiments.
Online Distributed Trajectory Planning for Quadrotor Swarm with Feasibility Guarantee using Linear Safe Corridor
Sep 19, 2021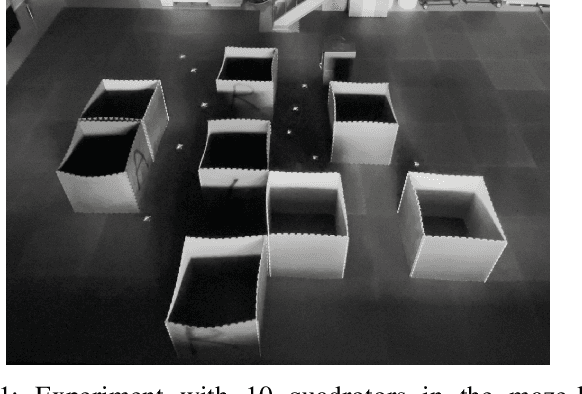
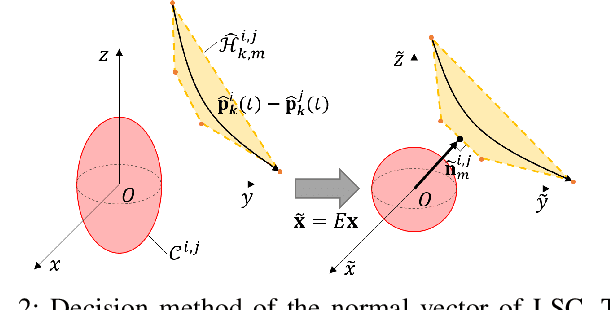
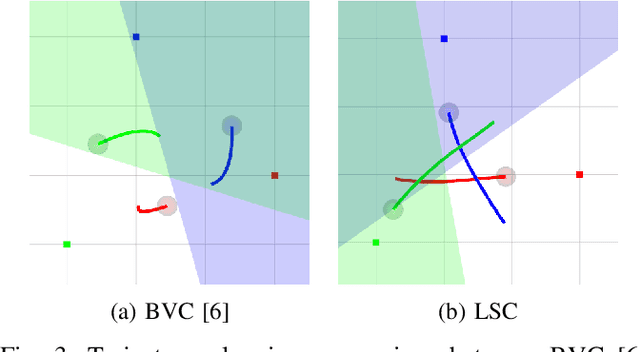
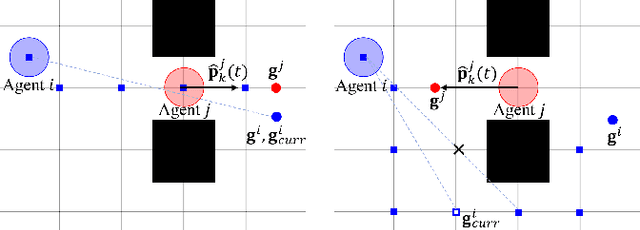
This paper presents a new online multi-agent trajectory planning algorithm that guarantees to generate safe, dynamically feasible trajectories in a cluttered environment. The proposed algorithm utilizes a linear safe corridor (LSC) to formulate the distributed trajectory optimization problem with only feasible constraints, so it does not resort to slack variables or soft constraints to avoid optimization failure. Also, we adopt a priority-based goal planning method to prevent the deadlock without additional communication for decision making. The proposed algorithm can compute the trajectories for 60 agents on average 15.5 ms per agent with an Intel i7 laptop and can find the trajectory that reaches the goal without deadlock in both random forest and indoor space. We validated safety and operability of the proposed algorithm through a real flight test with ten quadrotors in a maze-like environment.