 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecoding RobKiNet: Insights into Efficient Training of Robotic Kinematics Informed Neural Network
Sep 09, 2025In robots task and motion planning (TAMP), it is crucial to sample within the robot's configuration space to meet task-level global constraints and enhance the efficiency of subsequent motion planning. Due to the complexity of joint configuration sampling under multi-level constraints, traditional methods often lack efficiency. This paper introduces the principle of RobKiNet, a kinematics-informed neural network, for end-to-end sampling within the Continuous Feasible Set (CFS) under multiple constraints in configuration space, establishing its Optimization Expectation Model. Comparisons with traditional sampling and learning-based approaches reveal that RobKiNet's kinematic knowledge infusion enhances training efficiency by ensuring stable and accurate gradient optimization.Visualizations and quantitative analyses in a 2-DOF space validate its theoretical efficiency, while its application on a 9-DOF autonomous mobile manipulator robot(AMMR) demonstrates superior whole-body and decoupled control, excelling in battery disassembly tasks. RobKiNet outperforms deep reinforcement learning with a training speed 74.29 times faster and a sampling accuracy of up to 99.25%, achieving a 97.33% task completion rate in real-world scenarios.
Robust Robotic Pouring using Audition and Haptics
Feb 29, 2020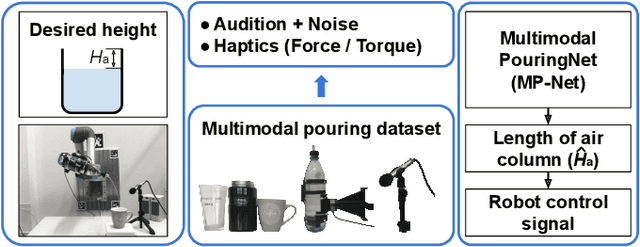
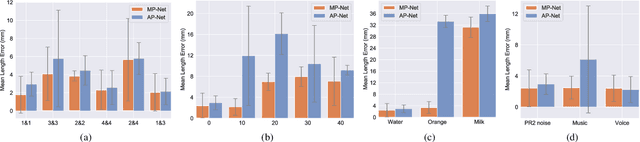
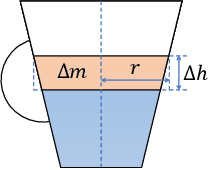
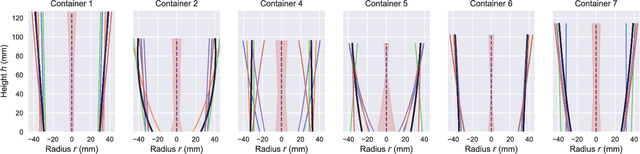
Robust and accurate estimation of liquid height lies as an essential part of pouring tasks for service robots. However, vision-based methods often fail in occluded conditions while audio-based methods cannot work well in a noisy environment. We instead propose a multimodal pouring network (MP-Net) that is able to robustly predict liquid height by conditioning on both audition and haptics input. MP-Net is trained on a self-collected multimodal pouring dataset. This dataset contains 300 robot pouring recordings with audio and force/torque measurements for three types of target containers. We also augment the audio data by inserting robot noise. We evaluated MP-Net on our collected dataset and a wide variety of robot experiments. Both network training results and robot experiments demonstrate that MP-Net is robust against noise and changes to the task and environment. Moreover, we further combine the predicted height and force data to estimate the shape of the target container.