 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLiveEdit: Towards Real-Time Diffusion-Based Streaming Video Editing
Jun 25, 2026Streaming video editing has made rapid progress, yet practical deployment is still limited by two core issues: maintaining stable backgrounds and non-edited regions over time, and achieving the low latency required for real-time interactive scenarios. Meanwhile, recent streaming video generation methods are mostly developed for synthesis and cannot be directly applied to editing due to the strict preservation requirement and region-specific control. In this work, we present a novel streaming video editing framework that performs causal, frame-by-frame editing with strong content preservation and real-time responsiveness. Our key design is a three-stage distillation pipeline that progressively transfers editing capability from a powerful bidirectional foundation model to an efficient unidirectional streaming editor, enabling stable long-horizon edits without sacrificing visual fidelity. To further support real-time deployment, we introduce an AR-oriented mask cache that reuses region-related computation across frames, substantially reducing redundant processing and accelerating inference. Finally, we establish a dedicated benchmark for streaming video editing. Extensive evaluations demonstrate that our method achieves state-of-the-art visual quality among streaming baselines while drastically boosting inference speed to 12.66 FPS, making it suitable for interactive and augmented reality applications.
Group Editing : Edit Multiple Images in One Go
Mar 25, 2026In this paper, we tackle the problem of performing consistent and unified modifications across a set of related images. This task is particularly challenging because these images may vary significantly in pose, viewpoint, and spatial layout. Achieving coherent edits requires establishing reliable correspondences across the images, so that modifications can be applied accurately to semantically aligned regions. To address this, we propose GroupEditing, a novel framework that builds both explicit and implicit relationships among images within a group. On the explicit side, we extract geometric correspondences using VGGT, which provides spatial alignment based on visual features. On the implicit side, we reformulate the image group as a pseudo-video and leverage the temporal coherence priors learned by pre-trained video models to capture latent relationships. To effectively fuse these two types of correspondences, we inject the explicit geometric cues from VGGT into the video model through a novel fusion mechanism. To support large-scale training, we construct GroupEditData, a new dataset containing high-quality masks and detailed captions for numerous image groups. Furthermore, to ensure identity preservation during editing, we introduce an alignment-enhanced RoPE module, which improves the model's ability to maintain consistent appearance across multiple images. Finally, we present GroupEditBench, a dedicated benchmark designed to evaluate the effectiveness of group-level image editing. Extensive experiments demonstrate that GroupEditing significantly outperforms existing methods in terms of visual quality, cross-view consistency, and semantic alignment.
DK-STN: A Domain Knowledge Embedded Spatio-Temporal Network Model for MJO Forecast
Dec 22, 2025
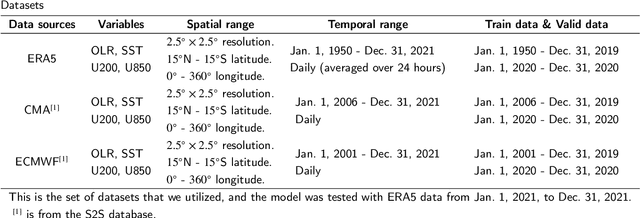
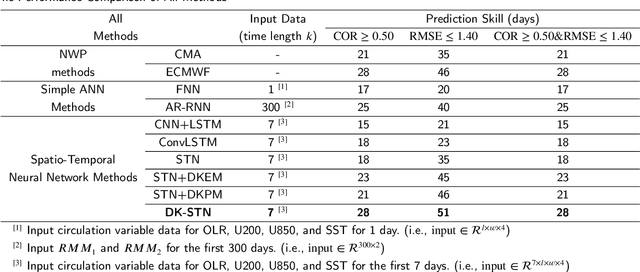

Understanding and predicting the Madden-Julian Oscillation (MJO) is fundamental for precipitation forecasting and disaster prevention. To date, long-term and accurate MJO prediction has remained a challenge for researchers. Conventional MJO prediction methods using Numerical Weather Prediction (NWP) are resource-intensive, time-consuming, and highly unstable (most NWP methods are sensitive to seasons, with better MJO forecast results in winter). While existing Artificial Neural Network (ANN) methods save resources and speed forecasting, their accuracy never reaches the 28 days predicted by the state-of-the-art NWP method, i.e., the operational forecasts from ECMWF, since neural networks cannot handle climate data effectively. In this paper, we present a Domain Knowledge Embedded Spatio-Temporal Network (DK-STN), a stable neural network model for accurate and efficient MJO forecasting. It combines the benefits of NWP and ANN methods and successfully improves the forecast accuracy of ANN methods while maintaining a high level of efficiency and stability. We begin with a spatial-temporal network (STN) and embed domain knowledge in it using two key methods: (i) applying a domain knowledge enhancement method and (ii) integrating a domain knowledge processing method into network training. We evaluated DK-STN with the 5th generation of ECMWF reanalysis (ERA5) data and compared it with ECMWF. Given 7 days of climate data as input, DK-STN can generate reliable forecasts for the following 28 days in 1-2 seconds, with an error of only 2-3 days in different seasons. DK-STN significantly exceeds ECMWF in that its forecast accuracy is equivalent to ECMWF's, while its efficiency and stability are significantly superior.
Safety-Aware Perception for Autonomous Collision Avoidance in Dynamic Environments
Mar 20, 2024



Autonomous collision avoidance requires accurate environmental perception; however, flight systems often possess limited sensing capabilities with field-of-view (FOV) restrictions. To navigate this challenge, we present a safety-aware approach for online determination of the optimal sensor-pointing direction $\psi_\text{d}$ which utilizes control barrier functions (CBFs). First, we generate a spatial density function $\Phi$ which leverages CBF constraints to map the collision risk of all local coordinates. Then, we convolve $\Phi$ with an attitude-dependent sensor FOV quality function to produce the objective function $\Gamma$ which quantifies the total observed risk for a given pointing direction. Finally, by finding the global optimizer for $\Gamma$, we identify the value of $\psi_\text{d}$ which maximizes the perception of risk within the FOV. We incorporate $\psi_\text{d}$ into a safety-critical flight architecture and conduct a numerical analysis using multiple simulated mission profiles. Our algorithm achieves a success rate of $88-96\%$, constituting a $16-29\%$ improvement compared to the best heuristic methods. We demonstrate the functionality of our approach via a flight demonstration using the Crazyflie 2.1 micro-quadrotor. Without a priori obstacle knowledge, the quadrotor follows a dynamic flight path while simultaneously calculating and tracking $\psi_\text{d}$ to perceive and avoid two static obstacles with an average computation time of 371 $\mu$s.