 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMM2CT: MR-to-CT translation for multi-modal image fusion with mamba
Aug 07, 2025Magnetic resonance (MR)-to-computed tomography (CT) translation offers significant advantages, including the elimination of radiation exposure associated with CT scans and the mitigation of imaging artifacts caused by patient motion. The existing approaches are based on single-modality MR-to-CT translation, with limited research exploring multimodal fusion. To address this limitation, we introduce Multi-modal MR to CT (MM2CT) translation method by leveraging multimodal T1- and T2-weighted MRI data, an innovative Mamba-based framework for multi-modal medical image synthesis. Mamba effectively overcomes the limited local receptive field in CNNs and the high computational complexity issues in Transformers. MM2CT leverages this advantage to maintain long-range dependencies modeling capabilities while achieving multi-modal MR feature integration. Additionally, we incorporate a dynamic local convolution module and a dynamic enhancement module to improve MRI-to-CT synthesis. The experiments on a public pelvis dataset demonstrate that MM2CT achieves state-of-the-art performance in terms of Structural Similarity Index Measure (SSIM) and Peak Signal-to-Noise Ratio (PSNR). Our code is publicly available at https://github.com/Gots-ch/MM2CT.
Modelling and Path Planning of Snake Robot in cluttered environment
May 15, 2018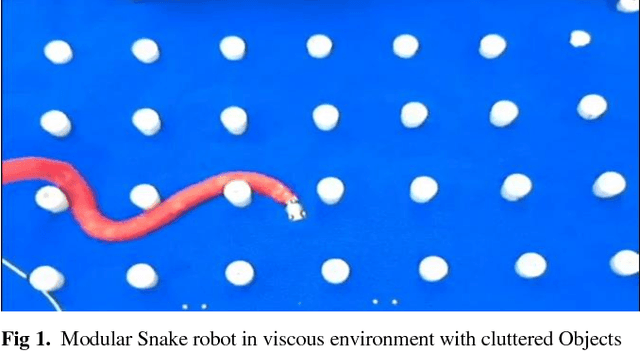
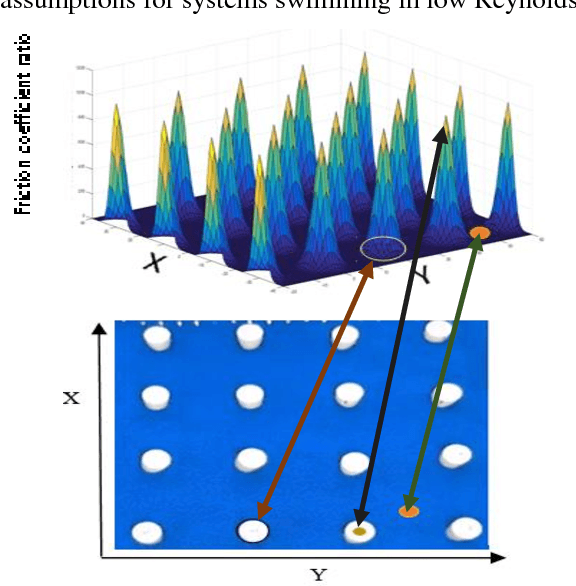
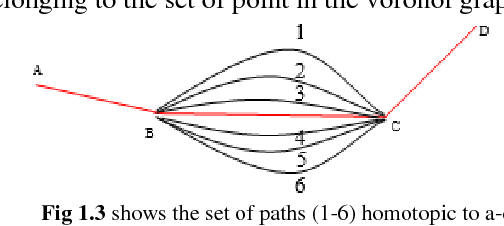
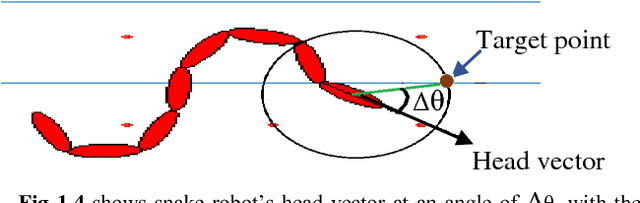
Studying snake robot locomotion in a cluttered environment has been a complicated task because the motion model is discontinuous due to the physical contact with obstacles, and the contact force cannot be determined solely by contact positions. We present a unique mathematical model of the robot interacting with obstacles in which the contact forces are mapped on the basis of a viscous friction model. Also a motion planning strategy has been introduced which helps deriving the simplest path that ensures sufficient number of contacts of the robot with the obstacles required to reach a goal position. Numerical simulations and experimental results are presented to validate the theoretical approach.
A review on locomotion robophysics: the study of movement at the intersection of robotics, soft matter and dynamical systems
Feb 12, 2016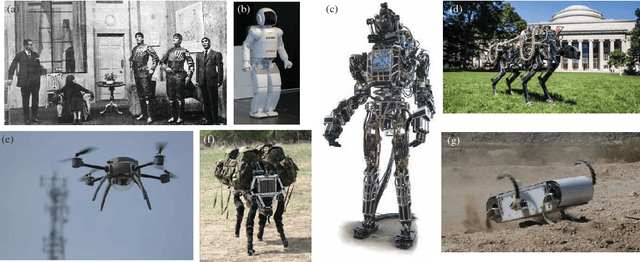
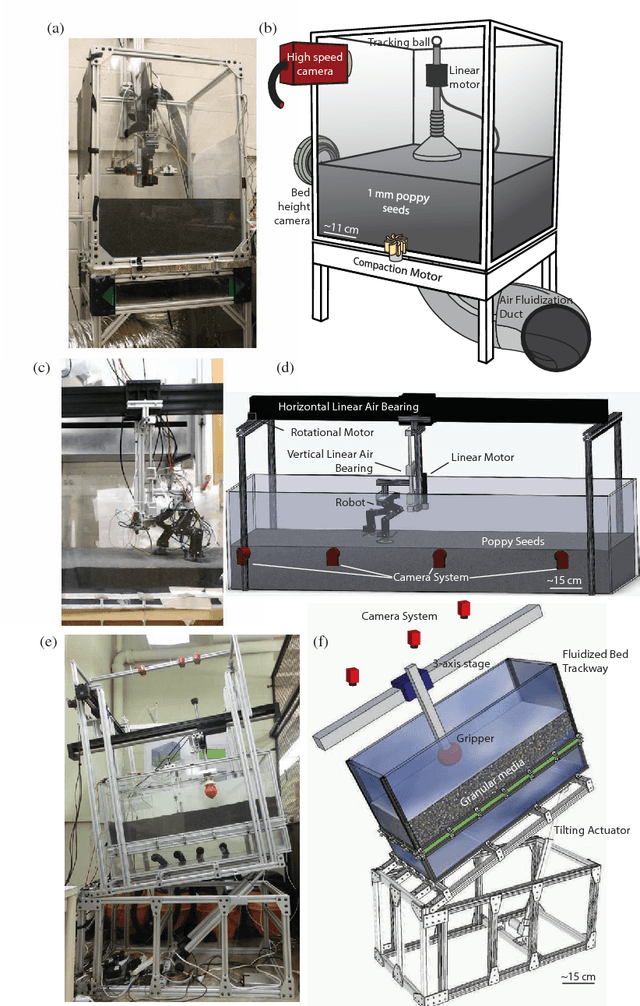
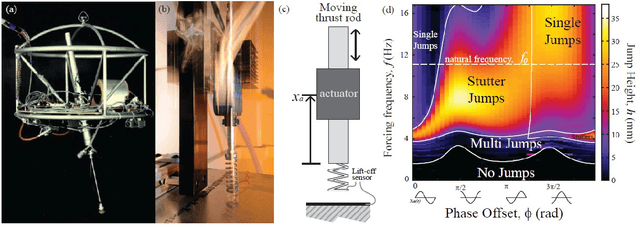
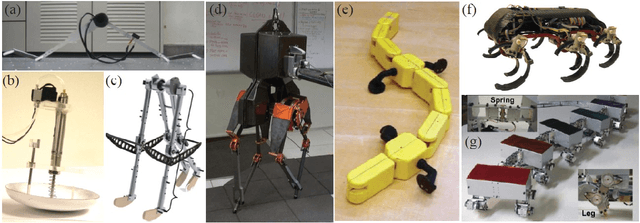
In this review we argue for the creation of a physics of moving systems -- a locomotion "robophysics" -- which we define as the pursuit of the discovery of principles of self generated motion. Robophysics can provide an important intellectual complement to the discipline of robotics, largely the domain of researchers from engineering and computer science. The essential idea is that we must complement study of complex robots in complex situations with systematic study of simplified robophysical devices in controlled laboratory settings and simplified theoretical models. We must thus use the methods of physics to examine successful and failed locomotion in simplified (abstracted) devices using parameter space exploration, systematic control, and techniques from dynamical systems. Using examples from our and other's research, we will discuss how such robophysical studies have begun to aid engineers in the creation of devices that begin to achieve life-like locomotor abilities on and within complex environments, have inspired interesting physics questions in low dimensional dynamical systems, geometric mechanics and soft matter physics, and have been useful to develop models for biological locomotion in complex terrain. The rapidly decreasing cost of constructing sophisticated robot models with easy access to significant computational power bodes well for scientists and engineers to engage in a discipline which can readily integrate experiment, theory and computation.