 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReliable machine learning potentials based on artificial neural network for graphene
Jun 12, 2023



Graphene is one of the most researched two dimensional (2D) material due to its unique combination of mechanical, thermal and electrical properties. Special 2D structure of graphene enables it to exhibit a wide range of peculiar material properties like high Young's modulus, high specific strength etc. which are critical for myriad of applications including light weight structural materials, multi-functional coating and flexible electronics. It is quite challenging and costly to experimentally investigate graphene/graphene based nanocomposites, computational simulations such as molecular dynamics (MD) simulations are widely adopted for understanding the microscopic origins of their unique properties. However, disparate results were reported from computational studies, especially MD simulations using various empirical inter-atomic potentials. In this work, an artificial neural network based interatomic potential has been developed for graphene to represent the potential energy surface based on first principle calculations. The developed machine learning potential (MLP) facilitates high fidelity MD simulations to approach the accuracy of ab initio methods but with a fraction of computational cost, which allows larger simulation size/length, and thereby enables accelerated discovery/design of graphene-based novel materials. Lattice parameter, coefficient of thermal expansion (CTE), Young's modulus and yield strength are estimated using machine learning accelerated MD simulations (MLMD), which are compared to experimental/first principle calculations from previous literatures. It is demonstrated that MLMD can capture the dominating mechanism governing CTE of graphene, including effects from lattice parameter and out of plane rippling.
* 10 pages
Deep set conditioned latent representations for action recognition
Dec 21, 2022In recent years multi-label, multi-class video action recognition has gained significant popularity. While reasoning over temporally connected atomic actions is mundane for intelligent species, standard artificial neural networks (ANN) still struggle to classify them. In the real world, atomic actions often temporally connect to form more complex composite actions. The challenge lies in recognising composite action of varying durations while other distinct composite or atomic actions occur in the background. Drawing upon the success of relational networks, we propose methods that learn to reason over the semantic concept of objects and actions. We empirically show how ANNs benefit from pretraining, relational inductive biases and unordered set-based latent representations. In this paper we propose deep set conditioned I3D (SCI3D), a two stream relational network that employs latent representation of state and visual representation for reasoning over events and actions. They learn to reason about temporally connected actions in order to identify all of them in the video. The proposed method achieves an improvement of around 1.49% mAP in atomic action recognition and 17.57% mAP in composite action recognition, over a I3D-NL baseline, on the CATER dataset.
* Conference VISAPP 2022, 11 pages,5 figures, 2 Tables, 6 plots
MockingBERT: A Method for Retroactively Adding Resilience to NLP Models
Aug 21, 2022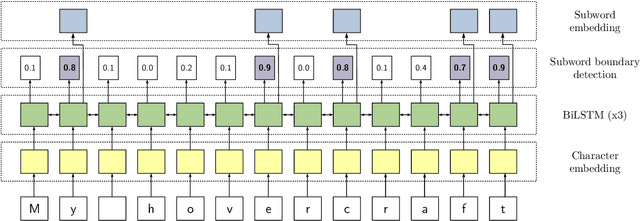
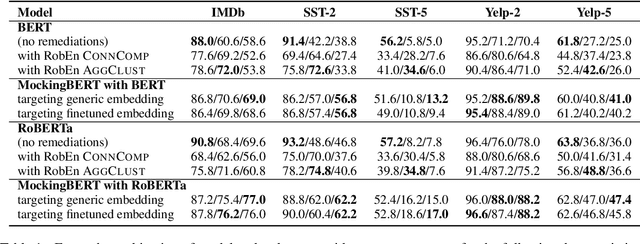
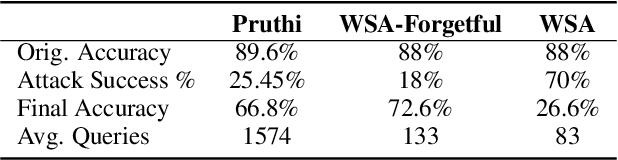
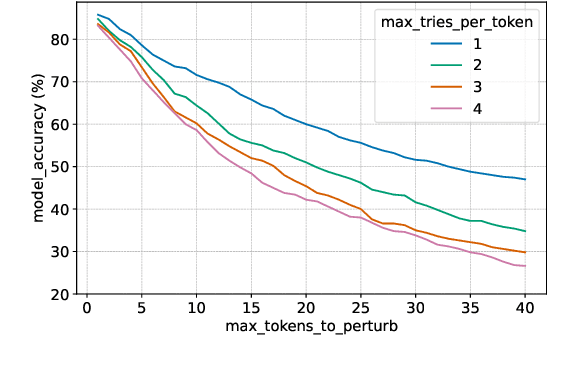
Protecting NLP models against misspellings whether accidental or adversarial has been the object of research interest for the past few years. Existing remediations have typically either compromised accuracy or required full model re-training with each new class of attacks. We propose a novel method of retroactively adding resilience to misspellings to transformer-based NLP models. This robustness can be achieved without the need for re-training of the original NLP model and with only a minimal loss of language understanding performance on inputs without misspellings. Additionally we propose a new efficient approximate method of generating adversarial misspellings, which significantly reduces the cost needed to evaluate a model's resilience to adversarial attacks.
Novel Compliant omnicrawler-wheel transforming module
Jul 10, 2018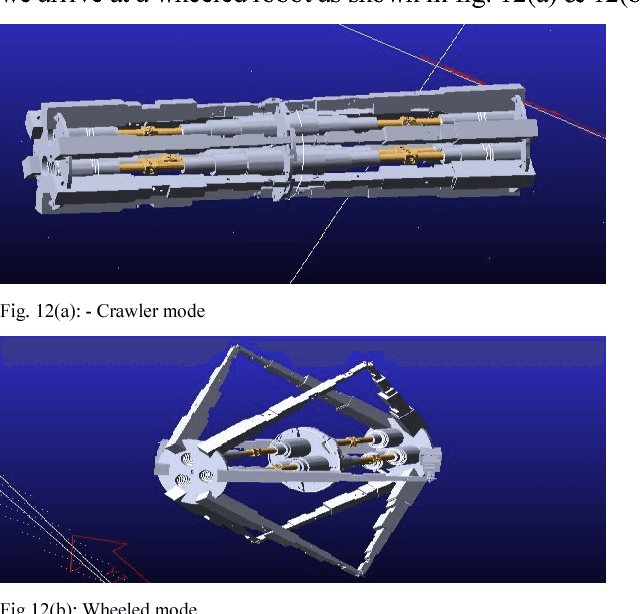
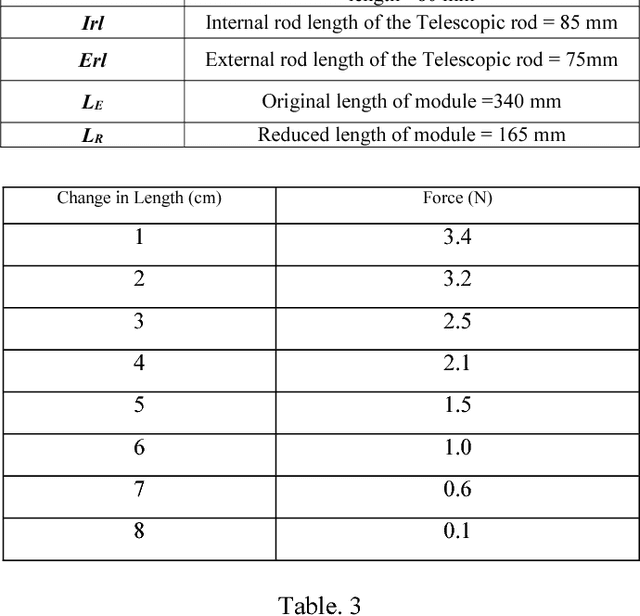
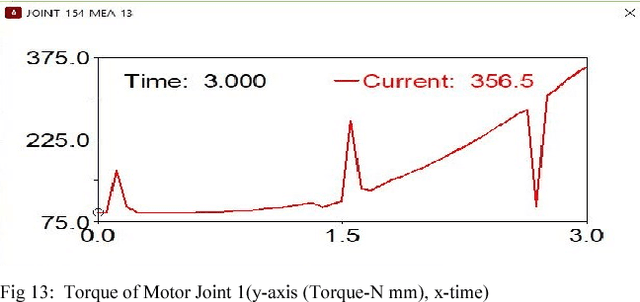
This paper presents a novel design of a crawler robot which is capable of transforming its chassis from an Omni crawler mode to a large-sized wheel mode using a novel mechanism. The transformation occurs without any additional actuators. Interestingly the robot can transform into a large diameter and small width wheel which enhances its maneuverability like small turning radius and fast/efficient locomotion. This paper contributes on improving the locomotion mode of previously developed hybrid compliant omnicrawler robot CObRaSO. In addition to legged and tracked mechanism, CObRaSO can now display large wheel mode which contributes to its locomotion capabilities. Mechanical design of the robot has been explained in a detailed manner in this paper and also the transforming experiment and torque analysis has been shown clearly
Modelling and Path Planning of Snake Robot in cluttered environment
May 15, 2018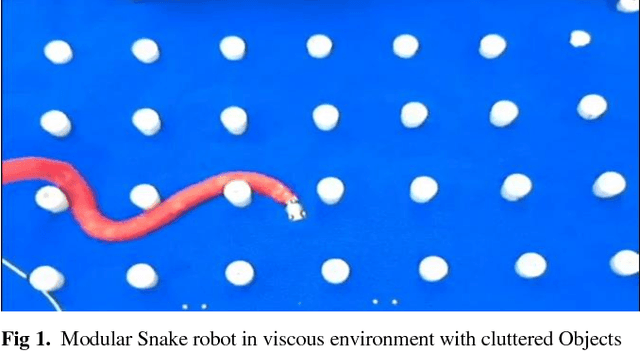
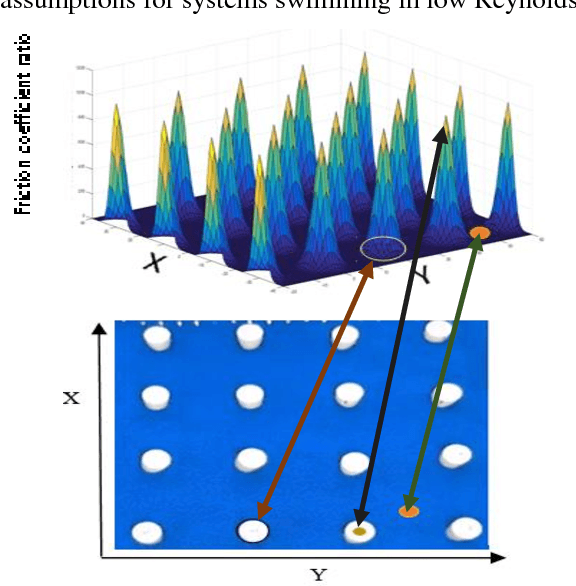
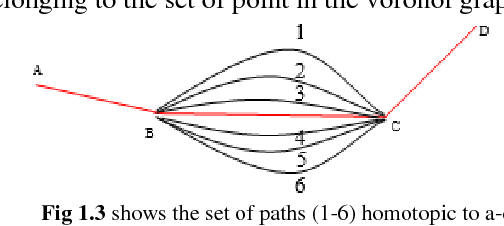
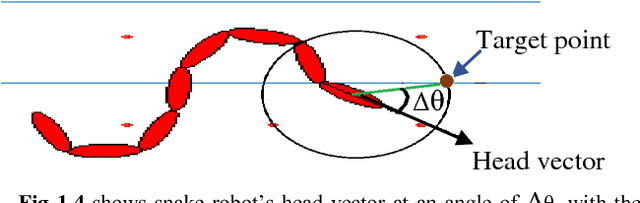
Studying snake robot locomotion in a cluttered environment has been a complicated task because the motion model is discontinuous due to the physical contact with obstacles, and the contact force cannot be determined solely by contact positions. We present a unique mathematical model of the robot interacting with obstacles in which the contact forces are mapped on the basis of a viscous friction model. Also a motion planning strategy has been introduced which helps deriving the simplest path that ensures sufficient number of contacts of the robot with the obstacles required to reach a goal position. Numerical simulations and experimental results are presented to validate the theoretical approach.
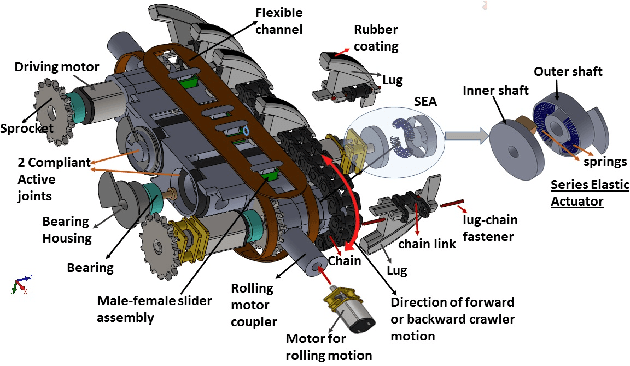
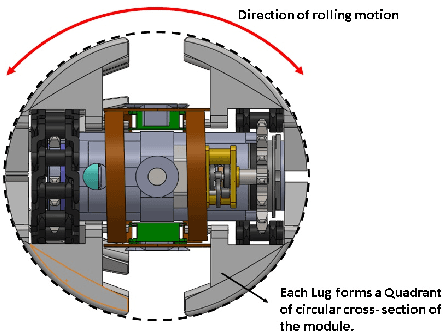
CObRaSO: Compliant Omni-Direction Bendable Hybrid Rigid and Soft OmniCrawler Module
Mar 12, 2018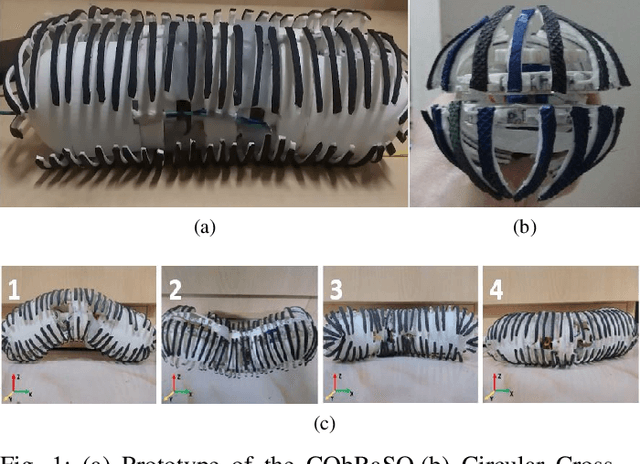
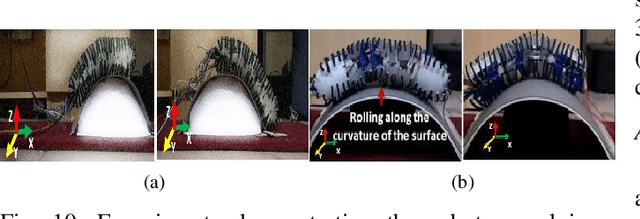
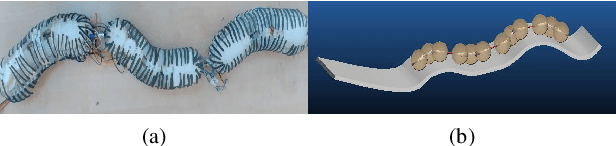
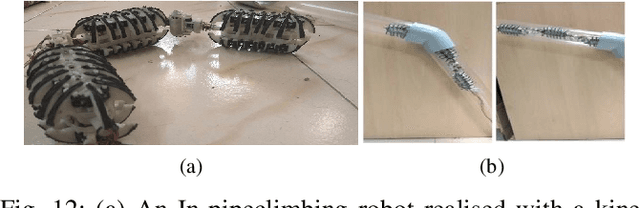
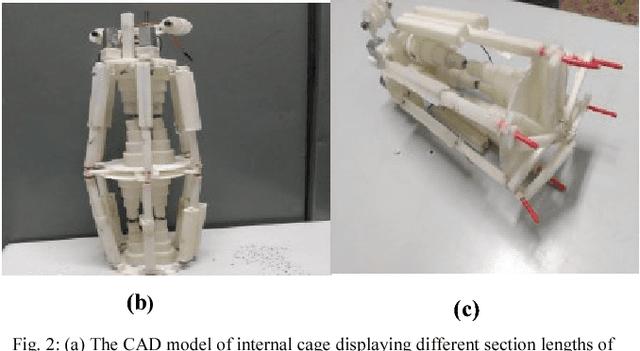
This paper presents a novel design of an Omnidirectional bendable Omnicrawler module- CObRaSO. Along with the longitudinal crawling and sideways rolling motion, the performance of the OmniCrawler is further enhanced by the introduction of Omnidirectional bending within the module, which is the key contribution of this paper. The Omnidirectional bending is achieved by an arrangement of two independent 1-DOF joints aligned at 90? w.r.t each other. The unique characteristic of this module is its ability to crawl in Omnidirectionally bent configuration which is achieved by a novel design of a 2-DOF roller chain and a backbone of a hybrid structure of a soft-rigid material. This hybrid structure provides compliant pathways for the lug-chain assembly to passively conform with the orientation of the module and crawl in Omnidirectional bent configuration, which makes this module one of its kind. Furthermore, we show that the unique modular design of CObRaSO unveils its versatility by achieving active compliance on an uneven surface, demonstrating its applications in different robotic platforms (an in-pipeline robot, Quadruped and snake robot) and exhibiting hybrid locomotion modes in various configurations of the robots. The mechanism and mobility characteristics of the proposed module have been verified with the aid of simulations and experiments on real robot prototype.
Design and optimal springs stiffness estimation of a Modular OmniCrawler in-pipe climbing Robot
Jun 19, 2017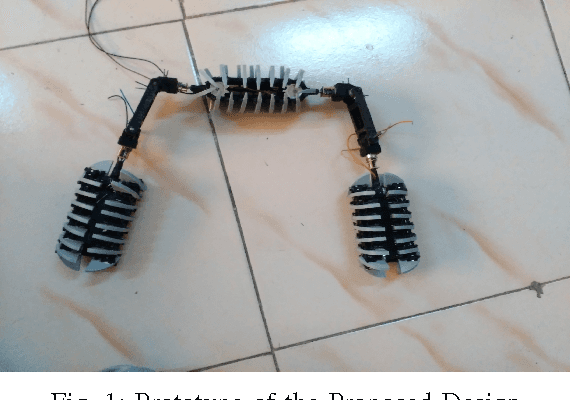
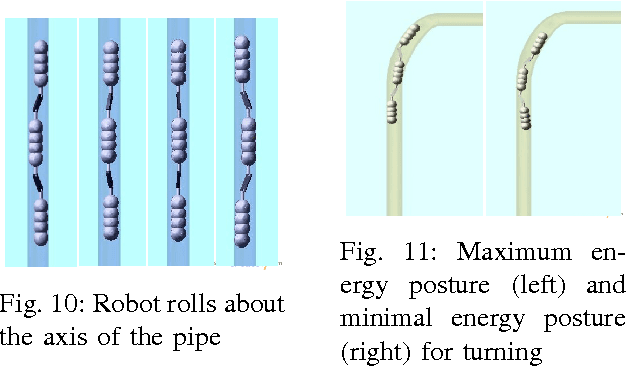
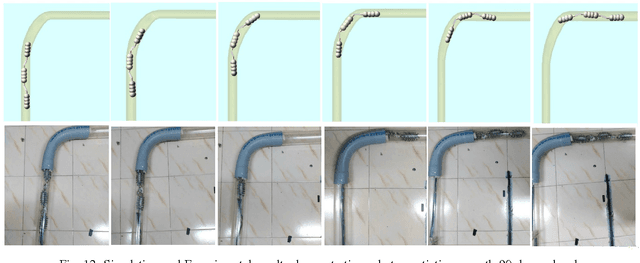
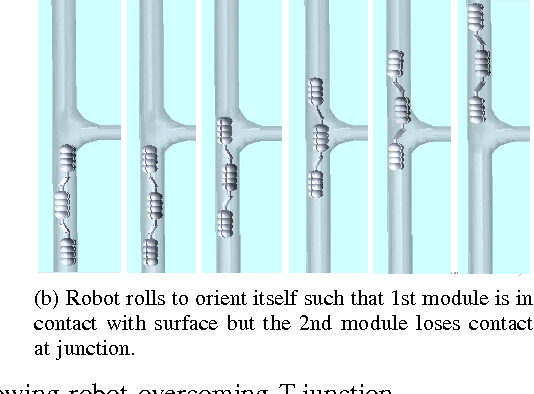
This paper discusses the design of a novel compliant in-pipe climbing modular robot for small diameter pipes. The robot consists of a kinematic chain of 3 OmniCrawler modules with a link connected in between 2 adjacent modules via compliant joints. While the tank-like crawler mechanism provides good traction on low friction surfaces, its circular cross-section makes it holonomic. The holonomic motion assists it to re-align in a direction to avoid obstacles during motion as well as overcome turns with a minimal energy posture. Additionally, the modularity enables it to negotiate T-junction without motion singularity. The compliance is realized using 4 torsion springs incorporated in joints joining 3 modules with 2 links. For a desirable pipe diameter (\text{\O} 75mm), the springs' stiffness values are obtained by formulating a constraint optimization problem which has been simulated in ADAMS MSC and further validated on a real robot prototype. In order to negotiate smooth vertical bends and friction coefficient variations in pipes, the design was later modified by replacing springs with series elastic actuators (SEA) at 2 of the 4 joints.
COCrIP: Compliant OmniCrawler In-pipeline Robot
Apr 22, 2017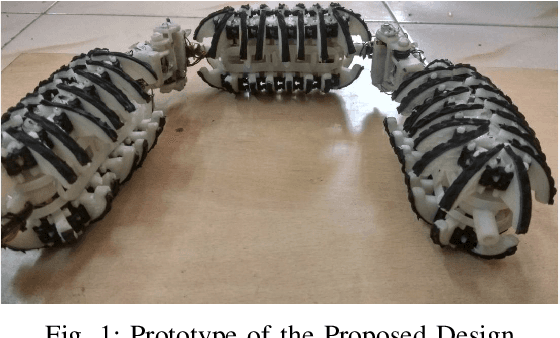
This paper presents a modular in-pipeline climbing robot with a novel compliant foldable OmniCrawler mechanism. The circular cross-section of the OmniCrawler module enables a holonomic motion to facilitate the alignment of the robot in the direction of bends. Additionally, the crawler mechanism provides a fair amount of traction, even on slippery surfaces. These advantages of crawler modules have been further supplemented by incorporating active compliance in the module itself which helps to negotiate sharp bends in small diameter pipes. The robot has a series of 3 such compliant foldable modules interconnected by the links via passive joints. For the desirable pipe diameter and curvature of the bends, the spring stiffness value for each passive joint is determined by formulating a constrained optimization problem using the quasi-static model of the robot. Moreover, a minimum friction coefficient value between the module-pipe surface which can be vertically climbed by the robot without slipping is estimated. The numerical simulation results have further been validated by experiments on real robot prototype.