 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCMPhysBench: A Benchmark for Evaluating Large Language Models in Condensed Matter Physics
Aug 25, 2025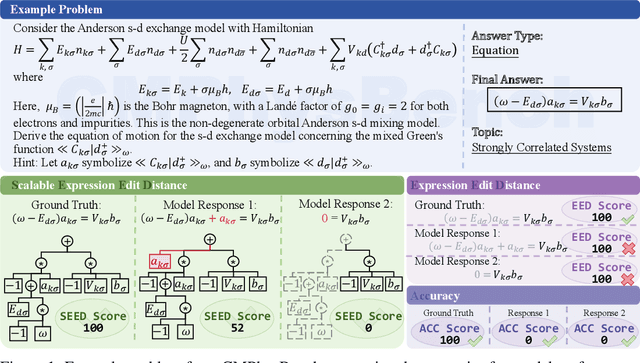
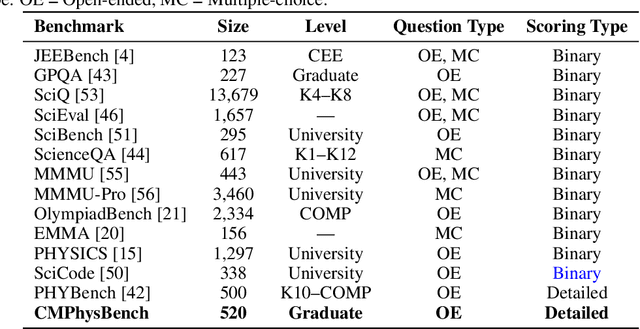
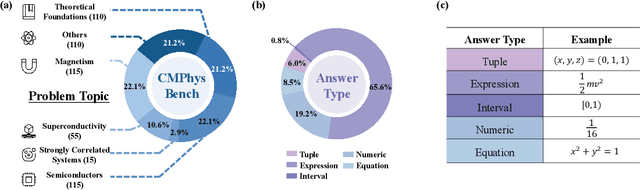

We introduce CMPhysBench, designed to assess the proficiency of Large Language Models (LLMs) in Condensed Matter Physics, as a novel Benchmark. CMPhysBench is composed of more than 520 graduate-level meticulously curated questions covering both representative subfields and foundational theoretical frameworks of condensed matter physics, such as magnetism, superconductivity, strongly correlated systems, etc. To ensure a deep understanding of the problem-solving process,we focus exclusively on calculation problems, requiring LLMs to independently generate comprehensive solutions. Meanwhile, leveraging tree-based representations of expressions, we introduce the Scalable Expression Edit Distance (SEED) score, which provides fine-grained (non-binary) partial credit and yields a more accurate assessment of similarity between prediction and ground-truth. Our results show that even the best models, Grok-4, reach only 36 average SEED score and 28% accuracy on CMPhysBench, underscoring a significant capability gap, especially for this practical and frontier domain relative to traditional physics. The code anddataset are publicly available at https://github.com/CMPhysBench/CMPhysBench.
Towards Robust Time-of-Flight Depth Denoising with Confidence-Aware Diffusion Model
Mar 25, 2025


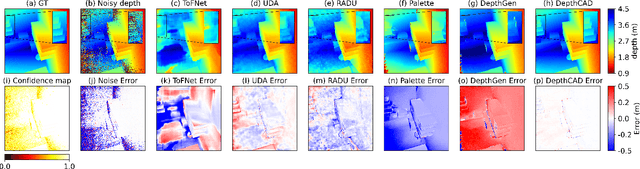
Time-of-Flight (ToF) sensors efficiently capture scene depth, but the nonlinear depth construction procedure often results in extremely large noise variance or even invalid areas. Recent methods based on deep neural networks (DNNs) achieve enhanced ToF denoising accuracy but tend to struggle when presented with severe noise corruption due to limited prior knowledge of ToF data distribution. In this paper, we propose DepthCAD, a novel ToF denoising approach that ensures global structural smoothness by leveraging the rich prior knowledge in Stable Diffusion and maintains local metric accuracy by steering the diffusion process with confidence guidance. To adopt the pretrained image diffusion model to ToF depth denoising, we apply the diffusion on raw ToF correlation measurements with dynamic range normalization before converting to depth maps. Experimental results validate the state-of-the-art performance of the proposed scheme, and the evaluation on real data further verifies its robustness against real-world ToF noise.