 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAwareness in robotics: An early perspective from the viewpoint of the EIC Pathfinder Challenge "Awareness Inside''
Feb 14, 2024Consciousness has been historically a heavily debated topic in engineering, science, and philosophy. On the contrary, awareness had less success in raising the interest of scholars in the past. However, things are changing as more and more researchers are getting interested in answering questions concerning what awareness is and how it can be artificially generated. The landscape is rapidly evolving, with multiple voices and interpretations of the concept being conceived and techniques being developed. The goal of this paper is to summarize and discuss the ones among these voices connected with projects funded by the EIC Pathfinder Challenge called ``Awareness Inside'', a nonrecurring call for proposals within Horizon Europe designed specifically for fostering research on natural and synthetic awareness. In this perspective, we dedicate special attention to challenges and promises of applying synthetic awareness in robotics, as the development of mature techniques in this new field is expected to have a special impact on generating more capable and trustworthy embodied systems.
Sampling-based Model Predictive Control Leveraging Parallelizable Physics Simulations
Jul 18, 2023We present a method for sampling-based model predictive control that makes use of a generic physics simulator as the dynamical model. In particular, we propose a Model Predictive Path Integral controller (MPPI), that uses the GPU-parallelizable IsaacGym simulator to compute the forward dynamics of a problem. By doing so, we eliminate the need for manual encoding of robot dynamics and interactions among objects and allow one to effortlessly solve complex navigation and contact-rich tasks. Since no explicit dynamic modeling is required, the method is easily extendable to different objects and robots. We demonstrate the effectiveness of this method in several simulated and real-world settings, among which mobile navigation with collision avoidance, non-prehensile manipulation, and whole-body control for high-dimensional configuration spaces. This method is a powerful and accessible tool to solve a large variety of contact-rich motion planning tasks.
MROS: A framework for robot self-adaptation
Mar 16, 2023Self-adaptation can be used in robotics to increase system robustness and reliability. This work describes the Metacontrol method for self-adaptation in robotics. Particularly, it details how the MROS (Metacontrol for ROS Systems) framework implements and packages Metacontrol, and it demonstrate how MROS can be applied in a navigation scenario where a mobile robot navigates in a factory floor. Video: https://www.youtube.com/watch?v=ISe9aMskJuE
Towards Stochastic Fault-tolerant Control using Precision Learning and Active Inference
Sep 13, 2021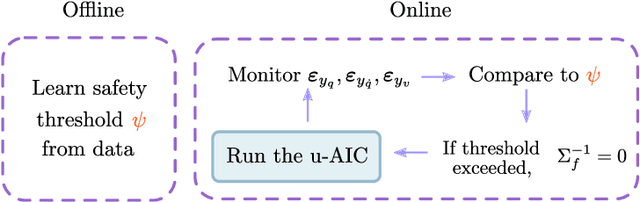
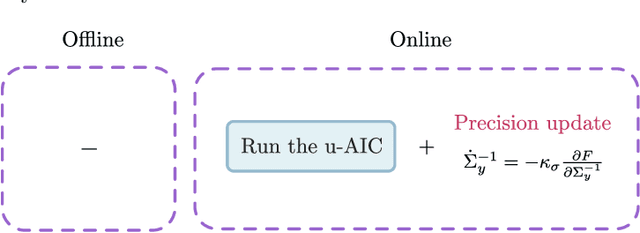
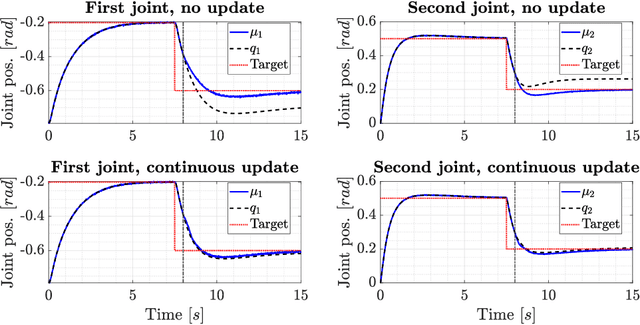
This work presents a fault-tolerant control scheme for sensory faults in robotic manipulators based on active inference. In the majority of existing schemes, a binary decision of whether a sensor is healthy (functional) or faulty is made based on measured data. The decision boundary is called a threshold and it is usually deterministic. Following a faulty decision, fault recovery is obtained by excluding the malfunctioning sensor. We propose a stochastic fault-tolerant scheme based on active inference and precision learning which does not require a priori threshold definitions to trigger fault recovery. Instead, the sensor precision, which represents its health status, is learned online in a model-free way allowing the system to gradually, and not abruptly exclude a failing unit. Experiments on a robotic manipulator show promising results and directions for future work are discussed.
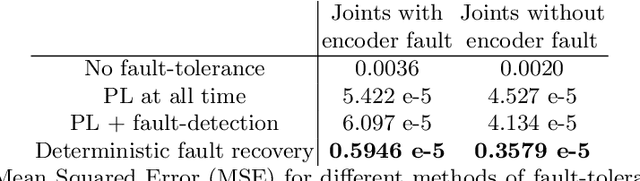
Fault-tolerant Control of Robot Manipulators with Sensory Faults using Unbiased Active Inference
Apr 05, 2021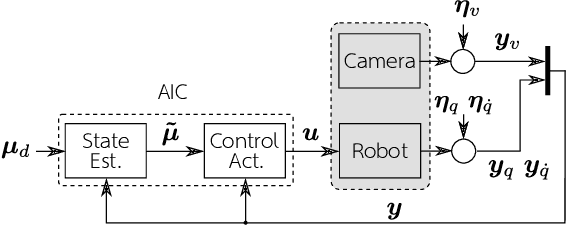
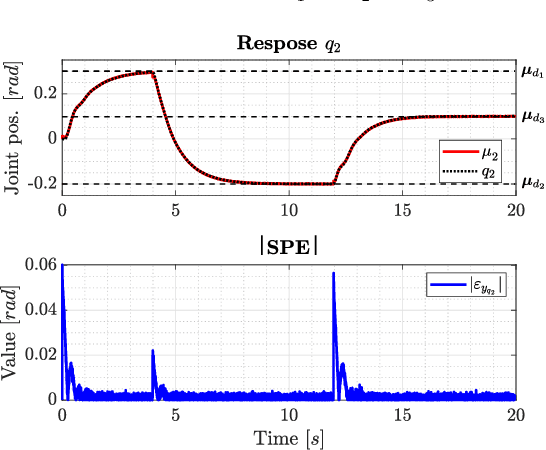
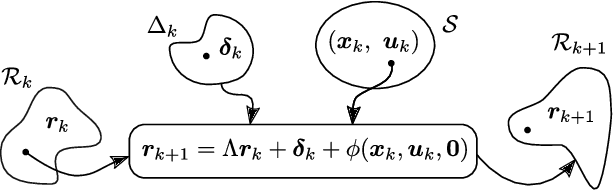
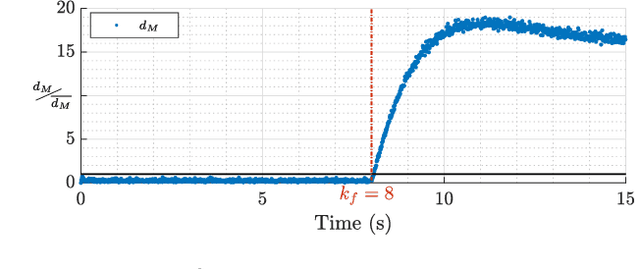
This work presents a novel fault-tolerant control scheme based on active inference. Specifically, a new formulation of active inference which, unlike previous solutions, provides unbiased state estimation and simplifies the definition of probabilistically robust thresholds for fault-tolerant control of robotic systems using the free-energy. The proposed solution makes use of the sensory prediction errors in the free-energy for the generation of residuals and thresholds for fault detection and isolation of sensory faults, and it does not require additional controllers for fault recovery. Results validating the benefits in a simulated 2-DOF manipulator are presented, and future directions to improve the current fault recovery approach are discussed.
MROS: Runtime Adaptation For Robot Control Architectures
Oct 19, 2020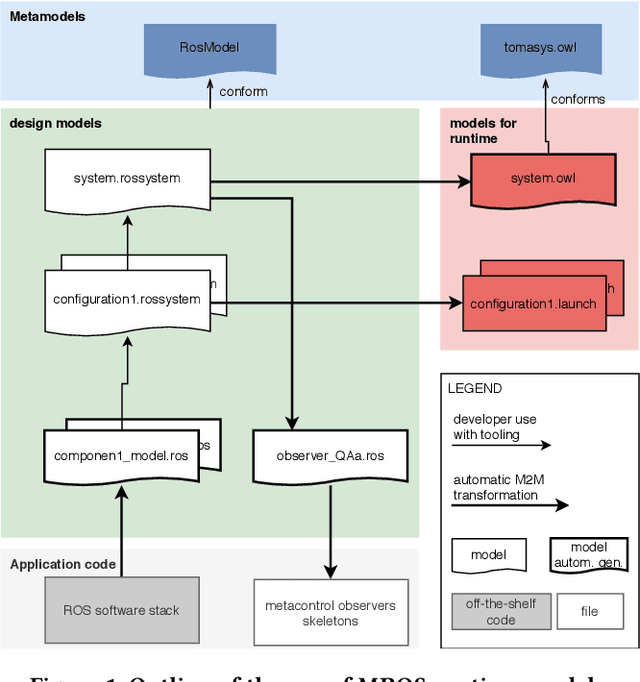
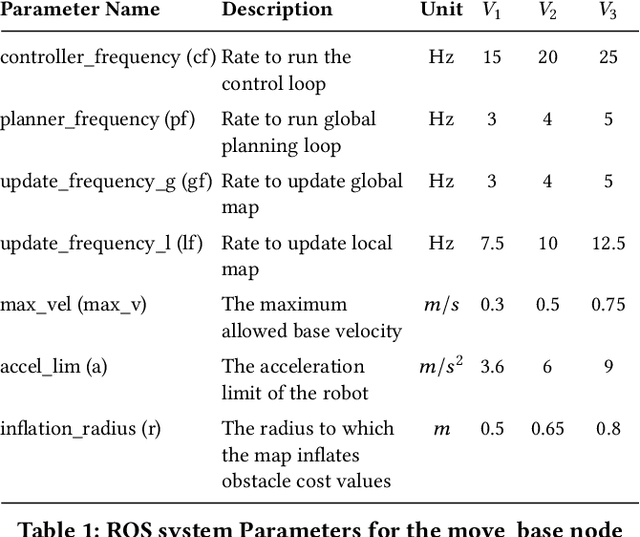
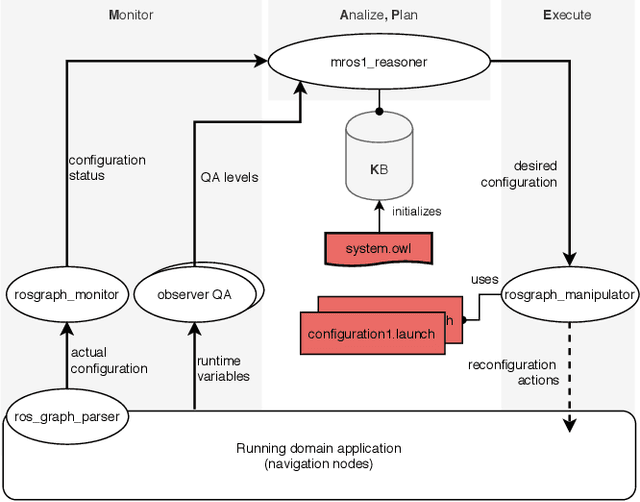
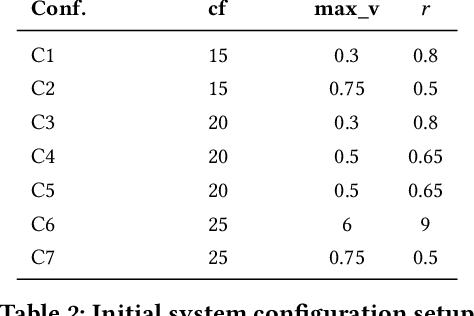
Known attempts to build autonomous robots rely on complex control architectures, often implemented with the Robot Operating System platform (ROS). These architectures need to be dynamically adaptable in order to cope with changing environment conditions, new mission requirements or component failures. The implementation of adaptable architectures is very often ad hoc, quickly gets cumbersome and expensive. We present a structured model-based framework for the adaptation of robot control architectures at run-time to satisfy set quality requirements. We use a formal meta-model to represent the configuration space of control architectures and the corresponding mission requirements. The meta-model is implemented as an OWL ontology with SWRL rules, enabling the use of an off-the-shelf reasoner for diagnostics and adaptation. The method is discussed and evaluated using two case studies of real, ROS-based systems: (i) for an autonomous dual arm mobile manipulator building a pyramid and (ii) a mobile robot navigating in a factory environment.