 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3PoinTr: 3D Point Tracks for Robot Manipulation Pretraining from Casual Videos
Mar 09, 2026Data-efficient training of robust robot policies is the key to unlocking automation in a wide array of novel tasks. Current systems require large volumes of demonstrations to achieve robustness, which is impractical in many applications. Learning policies directly from human videos is a promising alternative that removes teleoperation costs, but it shifts the challenge toward overcoming the embodiment gap (differences in kinematics and strategies between robots and humans), often requiring restrictive and carefully choreographed human motions. We propose 3PoinTr, a method for pretraining robot policies from casual and unconstrained human videos, enabling learning from motions natural for humans. 3PoinTr uses a transformer architecture to predict 3D point tracks as an intermediate embodiment-agnostic representation. 3D point tracks encode goal specifications, scene geometry, and spatiotemporal relationships. We use a Perceiver IO architecture to extract a compact representation for sample-efficient behavior cloning, even when point tracks violate downstream embodiment-specific constraints. We conduct thorough evaluation on simulated and real-world tasks, and find that 3PoinTr achieves robust spatial generalization on diverse categories of manipulation tasks with only 20 action-labeled robot demonstrations. 3PoinTr outperforms the baselines, including behavior cloning methods, as well as prior methods for pretraining from human videos. We also provide evaluations of 3PoinTr's 3D point track predictions compared to an existing point track prediction baseline. We find that 3PoinTr produces more accurate and higher quality point tracks due to a lightweight yet expressive architecture built on a single transformer, in addition to a training formulation that preserves supervision of partially occluded points. Project page: https://adamhung60.github.io/3PoinTr/.
The Role of Compute in Autonomous Aerial Vehicles
Jun 24, 2019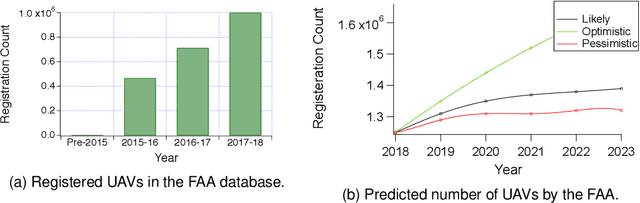
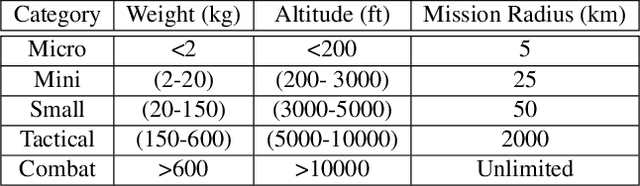
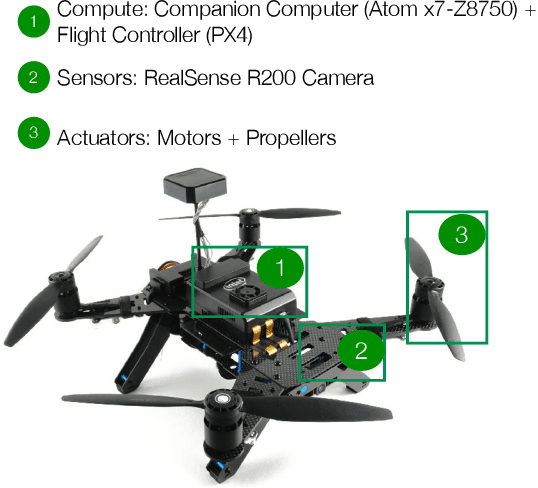
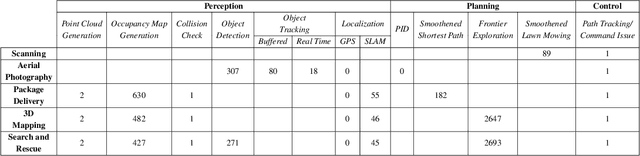
Autonomous-mobile cyber-physical machines are part of our future. Specifically, unmanned-aerial-vehicles have seen a resurgence in activity with use-cases such as package delivery. These systems face many challenges such as their low-endurance caused by limited onboard-energy, hence, improving the mission-time and energy are of importance. Such improvements traditionally are delivered through better algorithms. But our premise is that more powerful and efficient onboard-compute should also address the problem. This paper investigates how the compute subsystem, in a cyber-physical mobile machine, such as a Micro Aerial Vehicle, impacts mission-time and energy. Specifically, we pose the question as what is the role of computing for cyber-physical mobile robots? We show that compute and motion are tightly intertwined, hence a close examination of cyber and physical processes and their impact on one another is necessary. We show different impact paths through which compute impacts mission-metrics and examine them using analytical models, simulation, and end-to-end benchmarking. To enable similar studies, we open sourced MAVBench, our tool-set consisting of a closed-loop simulator and a benchmark suite. Our investigations show cyber-physical co-design, a methodology where robot's cyber and physical processes/quantities are developed with one another consideration, similar to hardware-software co-design, is necessary for optimal robot design.