 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNVIDIA Nemotron 3: Efficient and Open Intelligence
Dec 24, 2025We introduce the Nemotron 3 family of models - Nano, Super, and Ultra. These models deliver strong agentic, reasoning, and conversational capabilities. The Nemotron 3 family uses a Mixture-of-Experts hybrid Mamba-Transformer architecture to provide best-in-class throughput and context lengths of up to 1M tokens. Super and Ultra models are trained with NVFP4 and incorporate LatentMoE, a novel approach that improves model quality. The two larger models also include MTP layers for faster text generation. All Nemotron 3 models are post-trained using multi-environment reinforcement learning enabling reasoning, multi-step tool use, and support granular reasoning budget control. Nano, the smallest model, outperforms comparable models in accuracy while remaining extremely cost-efficient for inference. Super is optimized for collaborative agents and high-volume workloads such as IT ticket automation. Ultra, the largest model, provides state-of-the-art accuracy and reasoning performance. Nano is released together with its technical report and this white paper, while Super and Ultra will follow in the coming months. We will openly release the model weights, pre- and post-training software, recipes, and all data for which we hold redistribution rights.
Nemotron 3 Nano: Open, Efficient Mixture-of-Experts Hybrid Mamba-Transformer Model for Agentic Reasoning
Dec 23, 2025We present Nemotron 3 Nano 30B-A3B, a Mixture-of-Experts hybrid Mamba-Transformer language model. Nemotron 3 Nano was pretrained on 25 trillion text tokens, including more than 3 trillion new unique tokens over Nemotron 2, followed by supervised fine tuning and large-scale RL on diverse environments. Nemotron 3 Nano achieves better accuracy than our previous generation Nemotron 2 Nano while activating less than half of the parameters per forward pass. It achieves up to 3.3x higher inference throughput than similarly-sized open models like GPT-OSS-20B and Qwen3-30B-A3B-Thinking-2507, while also being more accurate on popular benchmarks. Nemotron 3 Nano demonstrates enhanced agentic, reasoning, and chat abilities and supports context lengths up to 1M tokens. We release both our pretrained Nemotron 3 Nano 30B-A3B Base and post-trained Nemotron 3 Nano 30B-A3B checkpoints on Hugging Face.
NVIDIA Nemotron Nano 2: An Accurate and Efficient Hybrid Mamba-Transformer Reasoning Model
Aug 21, 2025



We introduce Nemotron-Nano-9B-v2, a hybrid Mamba-Transformer language model designed to increase throughput for reasoning workloads while achieving state-of-the-art accuracy compared to similarly-sized models. Nemotron-Nano-9B-v2 builds on the Nemotron-H architecture, in which the majority of the self-attention layers in the common Transformer architecture are replaced with Mamba-2 layers, to achieve improved inference speed when generating the long thinking traces needed for reasoning. We create Nemotron-Nano-9B-v2 by first pre-training a 12-billion-parameter model (Nemotron-Nano-12B-v2-Base) on 20 trillion tokens using an FP8 training recipe. After aligning Nemotron-Nano-12B-v2-Base, we employ the Minitron strategy to compress and distill the model with the goal of enabling inference on up to 128k tokens on a single NVIDIA A10G GPU (22GiB of memory, bfloat16 precision). Compared to existing similarly-sized models (e.g., Qwen3-8B), we show that Nemotron-Nano-9B-v2 achieves on-par or better accuracy on reasoning benchmarks while achieving up to 6x higher inference throughput in reasoning settings like 8k input and 16k output tokens. We are releasing Nemotron-Nano-9B-v2, Nemotron-Nano12B-v2-Base, and Nemotron-Nano-9B-v2-Base checkpoints along with the majority of our pre- and post-training datasets on Hugging Face.
Efficient Hybrid Language Model Compression through Group-Aware SSM Pruning
Apr 15, 2025Hybrid LLM architectures that combine Attention and State Space Models (SSMs) achieve state-of-the-art accuracy and runtime performance. Recent work has demonstrated that applying compression and distillation to Attention-only models yields smaller, more accurate models at a fraction of the training cost. In this work, we explore the effectiveness of compressing Hybrid architectures. We introduce a novel group-aware pruning strategy that preserves the structural integrity of SSM blocks and their sequence modeling capabilities. Furthermore, we demonstrate the necessity of such SSM pruning to achieve improved accuracy and inference speed compared to traditional approaches. Our compression recipe combines SSM, FFN, embedding dimension, and layer pruning, followed by knowledge distillation-based retraining, similar to the MINITRON technique. Using this approach, we compress the Nemotron-H 8B Hybrid model down to 4B parameters with up to 40x fewer training tokens. The resulting model surpasses the accuracy of similarly-sized models while achieving 2x faster inference, significantly advancing the Pareto frontier.
Nemotron-H: A Family of Accurate and Efficient Hybrid Mamba-Transformer Models
Apr 10, 2025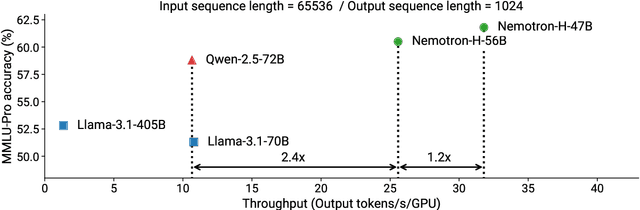

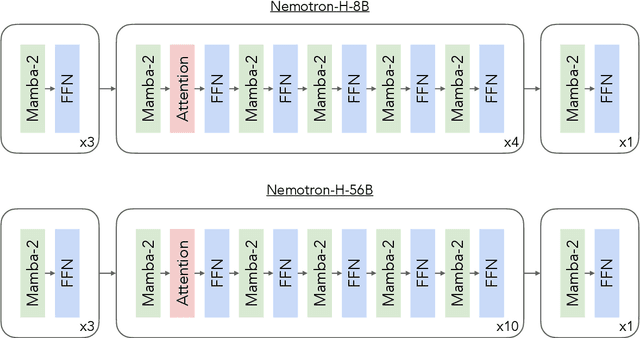
As inference-time scaling becomes critical for enhanced reasoning capabilities, it is increasingly becoming important to build models that are efficient to infer. We introduce Nemotron-H, a family of 8B and 56B/47B hybrid Mamba-Transformer models designed to reduce inference cost for a given accuracy level. To achieve this goal, we replace the majority of self-attention layers in the common Transformer model architecture with Mamba layers that perform constant computation and require constant memory per generated token. We show that Nemotron-H models offer either better or on-par accuracy compared to other similarly-sized state-of-the-art open-sourced Transformer models (e.g., Qwen-2.5-7B/72B and Llama-3.1-8B/70B), while being up to 3$\times$ faster at inference. To further increase inference speed and reduce the memory required at inference time, we created Nemotron-H-47B-Base from the 56B model using a new compression via pruning and distillation technique called MiniPuzzle. Nemotron-H-47B-Base achieves similar accuracy to the 56B model, but is 20% faster to infer. In addition, we introduce an FP8-based training recipe and show that it can achieve on par results with BF16-based training. This recipe is used to train the 56B model. All Nemotron-H models will be released, with support in Hugging Face, NeMo, and Megatron-LM.
Elucidating Optimal Reward-Diversity Tradeoffs in Text-to-Image Diffusion Models
Sep 09, 2024Text-to-image (T2I) diffusion models have become prominent tools for generating high-fidelity images from text prompts. However, when trained on unfiltered internet data, these models can produce unsafe, incorrect, or stylistically undesirable images that are not aligned with human preferences. To address this, recent approaches have incorporated human preference datasets to fine-tune T2I models or to optimize reward functions that capture these preferences. Although effective, these methods are vulnerable to reward hacking, where the model overfits to the reward function, leading to a loss of diversity in the generated images. In this paper, we prove the inevitability of reward hacking and study natural regularization techniques like KL divergence and LoRA scaling, and their limitations for diffusion models. We also introduce Annealed Importance Guidance (AIG), an inference-time regularization inspired by Annealed Importance Sampling, which retains the diversity of the base model while achieving Pareto-Optimal reward-diversity tradeoffs. Our experiments demonstrate the benefits of AIG for Stable Diffusion models, striking the optimal balance between reward optimization and image diversity. Furthermore, a user study confirms that AIG improves diversity and quality of generated images across different model architectures and reward functions.
NeMo-Aligner: Scalable Toolkit for Efficient Model Alignment
May 02, 2024



Aligning Large Language Models (LLMs) with human values and preferences is essential for making them helpful and safe. However, building efficient tools to perform alignment can be challenging, especially for the largest and most competent LLMs which often contain tens or hundreds of billions of parameters. We create NeMo-Aligner, a toolkit for model alignment that can efficiently scale to using hundreds of GPUs for training. NeMo-Aligner comes with highly optimized and scalable implementations for major paradigms of model alignment such as: Reinforcement Learning from Human Feedback (RLHF), Direct Preference Optimization (DPO), SteerLM, and Self-Play Fine-Tuning (SPIN). Additionally, our toolkit supports running most of the alignment techniques in a Parameter Efficient Fine-Tuning (PEFT) setting. NeMo-Aligner is designed for extensibility, allowing support for other alignment techniques with minimal effort. It is open-sourced with Apache 2.0 License and we invite community contributions at https://github.com/NVIDIA/NeMo-Aligner
Hierarchical Graph Neural Network with Cross-Attention for Cross-Device User Matching
Apr 06, 2023Cross-device user matching is a critical problem in numerous domains, including advertising, recommender systems, and cybersecurity. It involves identifying and linking different devices belonging to the same person, utilizing sequence logs. Previous data mining techniques have struggled to address the long-range dependencies and higher-order connections between the logs. Recently, researchers have modeled this problem as a graph problem and proposed a two-tier graph contextual embedding (TGCE) neural network architecture, which outperforms previous methods. In this paper, we propose a novel hierarchical graph neural network architecture (HGNN), which has a more computationally efficient second level design than TGCE. Furthermore, we introduce a cross-attention (Cross-Att) mechanism in our model, which improves performance by 5% compared to the state-of-the-art TGCE method.
MG-GNN: Multigrid Graph Neural Networks for Learning Multilevel Domain Decomposition Methods
Jan 26, 2023Domain decomposition methods (DDMs) are popular solvers for discretized systems of partial differential equations (PDEs), with one-level and multilevel variants. These solvers rely on several algorithmic and mathematical parameters, prescribing overlap, subdomain boundary conditions, and other properties of the DDM. While some work has been done on optimizing these parameters, it has mostly focused on the one-level setting or special cases such as structured-grid discretizations with regular subdomain construction. In this paper, we propose multigrid graph neural networks (MG-GNN), a novel GNN architecture for learning optimized parameters in two-level DDMs\@. We train MG-GNN using a new unsupervised loss function, enabling effective training on small problems that yields robust performance on unstructured grids that are orders of magnitude larger than those in the training set. We show that MG-GNN outperforms popular hierarchical graph network architectures for this optimization and that our proposed loss function is critical to achieving this improved performance.
Optimized Sparse Matrix Operations for Reverse Mode Automatic Differentiation
Dec 10, 2022



Sparse matrix representations are ubiquitous in computational science and machine learning, leading to significant reductions in compute time, in comparison to dense representation, for problems that have local connectivity. The adoption of sparse representation in leading ML frameworks such as PyTorch is incomplete, however, with support for both automatic differentiation and GPU acceleration missing. In this work, we present an implementation of a CSR-based sparse matrix wrapper for PyTorch with CUDA acceleration for basic matrix operations, as well as automatic differentiability. We also present several applications of the resulting sparse kernels to optimization problems, demonstrating ease of implementation and performance measurements versus their dense counterparts.