 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePolarity is all you need to learn and transfer faster
Mar 29, 2023Natural intelligences (NIs) thrive in a dynamic world - they learn quickly, sometimes with only a few samples. In contrast, Artificial intelligences (AIs) typically learn with prohibitive amount of training samples and computational power. What design principle difference between NI and AI could contribute to such a discrepancy? Here, we propose an angle from weight polarity: development processes initialize NIs with advantageous polarity configurations; as NIs grow and learn, synapse magnitudes update yet polarities are largely kept unchanged. We demonstrate with simulation and image classification tasks that if weight polarities are adequately set $\textit{a priori}$, then networks learn with less time and data. We also explicitly illustrate situations in which $\textit{a priori}$ setting the weight polarities is disadvantageous for networks. Our work illustrates the value of weight polarities from the perspective of statistical and computational efficiency during learning.
Why Do Networks Need Negative Weights?
Aug 05, 2022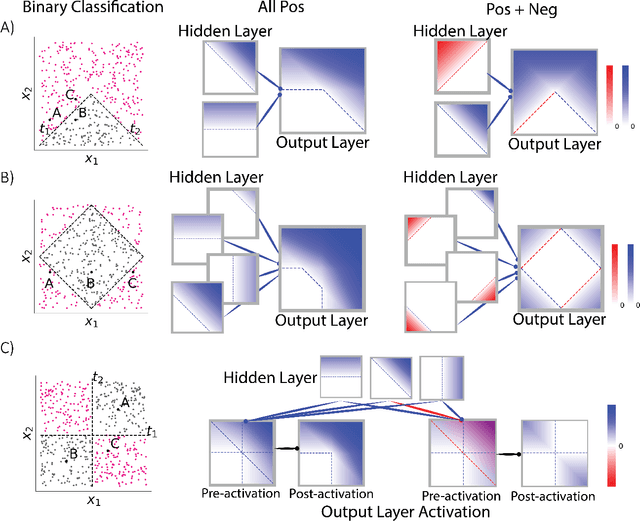
Why do networks have negative weights at all? The answer is: to learn more functions. We mathematically prove that deep neural networks with all non-negative weights are not universal approximators. This fundamental result is assumed by much of the deep learning literature without previously proving the result and demonstrating its necessity.
Out-of-distribution and in-distribution posterior calibration using Kernel Density Polytopes
Feb 14, 2022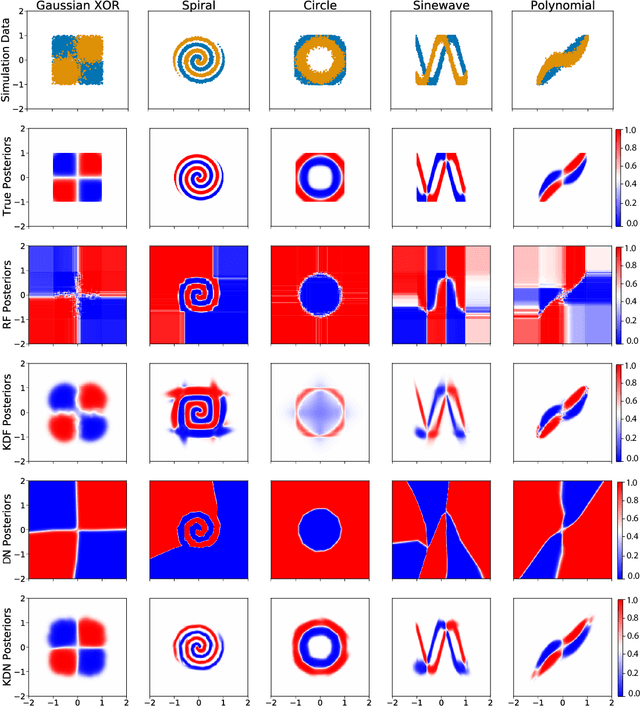

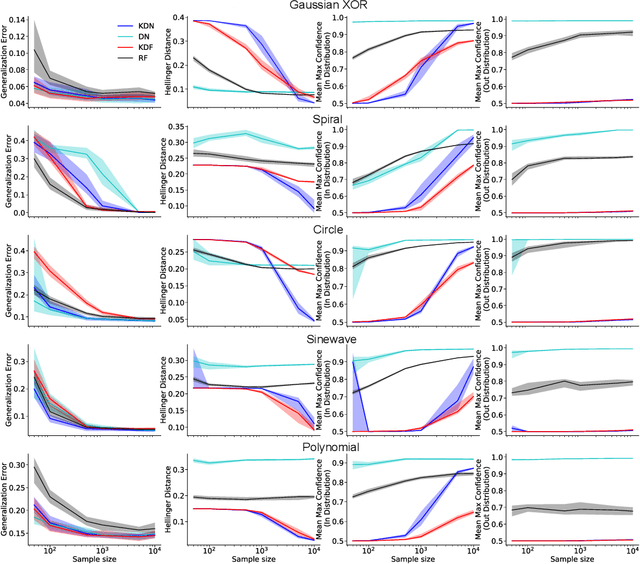
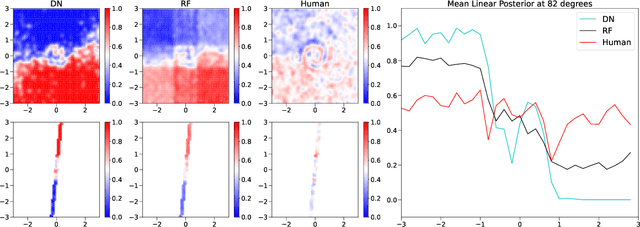
Any reasonable machine learning (ML) model should not only interpolate efficiently in between the training samples provided (in-distribution region), but also approach the extrapolative or out-of-distribution (OOD) region without being overconfident. Our experiment on human subjects justifies the aforementioned properties for human intelligence as well. Many state-of-the-art algorithms have tried to fix the overconfidence problem of ML models in the OOD region. However, in doing so, they have often impaired the in-distribution performance of the model. Our key insight is that ML models partition the feature space into polytopes and learn constant (random forests) or affine (ReLU networks) functions over those polytopes. This leads to the OOD overconfidence problem for the polytopes which lie in the training data boundary and extend to infinity. To resolve this issue, we propose kernel density methods that fit Gaussian kernel over the polytopes, which are learned using ML models. Specifically, we introduce two variants of kernel density polytopes: Kernel Density Forest (KDF) and Kernel Density Network (KDN) based on random forests and deep networks, respectively. Studies on various simulation settings show that both KDF and KDN achieve uniform confidence over the classes in the OOD region while maintaining good in-distribution accuracy compared to that of their respective parent models.
Prospective Learning: Back to the Future
Jan 19, 2022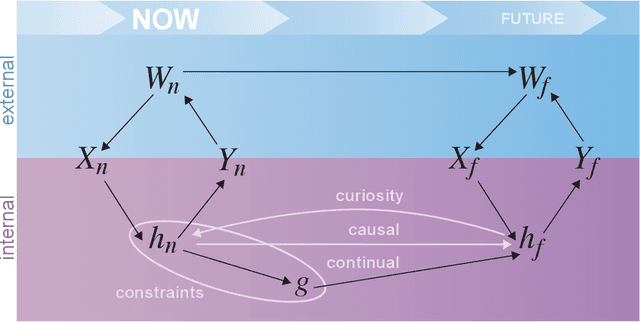
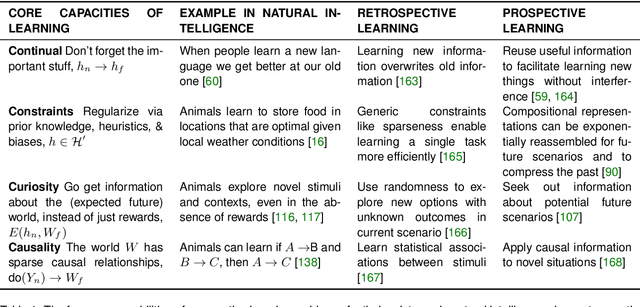
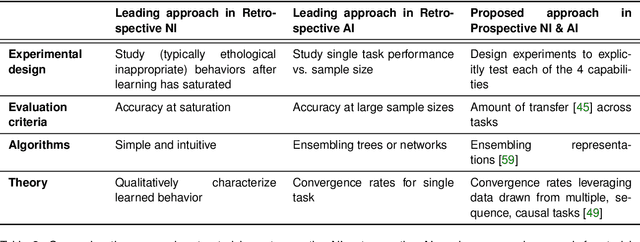
Research on both natural intelligence (NI) and artificial intelligence (AI) generally assumes that the future resembles the past: intelligent agents or systems (what we call 'intelligence') observe and act on the world, then use this experience to act on future experiences of the same kind. We call this 'retrospective learning'. For example, an intelligence may see a set of pictures of objects, along with their names, and learn to name them. A retrospective learning intelligence would merely be able to name more pictures of the same objects. We argue that this is not what true intelligence is about. In many real world problems, both NIs and AIs will have to learn for an uncertain future. Both must update their internal models to be useful for future tasks, such as naming fundamentally new objects and using these objects effectively in a new context or to achieve previously unencountered goals. This ability to learn for the future we call 'prospective learning'. We articulate four relevant factors that jointly define prospective learning. Continual learning enables intelligences to remember those aspects of the past which it believes will be most useful in the future. Prospective constraints (including biases and priors) facilitate the intelligence finding general solutions that will be applicable to future problems. Curiosity motivates taking actions that inform future decision making, including in previously unmet situations. Causal estimation enables learning the structure of relations that guide choosing actions for specific outcomes, even when the specific action-outcome contingencies have never been observed before. We argue that a paradigm shift from retrospective to prospective learning will enable the communities that study intelligence to unite and overcome existing bottlenecks to more effectively explain, augment, and engineer intelligences.
Towards a theory of out-of-distribution learning
Oct 07, 2021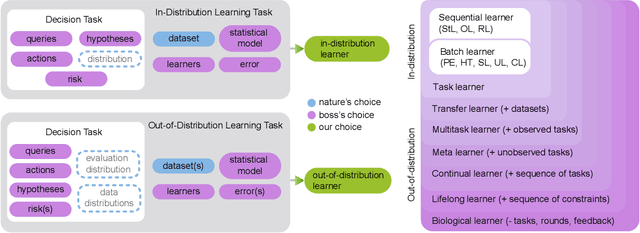
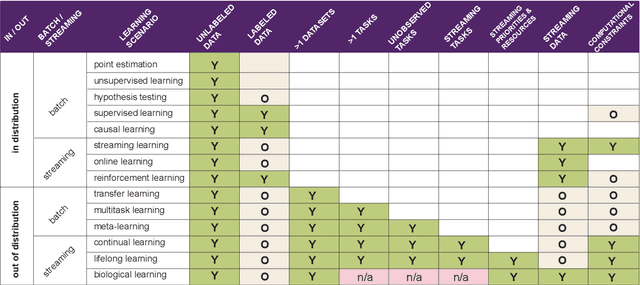
What is learning? 20$^{st}$ century formalizations of learning theory -- which precipitated revolutions in artificial intelligence -- focus primarily on $\mathit{in-distribution}$ learning, that is, learning under the assumption that the training data are sampled from the same distribution as the evaluation distribution. This assumption renders these theories inadequate for characterizing 21$^{st}$ century real world data problems, which are typically characterized by evaluation distributions that differ from the training data distributions (referred to as out-of-distribution learning). We therefore make a small change to existing formal definitions of learnability by relaxing that assumption. We then introduce $\mathbf{learning\ efficiency}$ (LE) to quantify the amount a learner is able to leverage data for a given problem, regardless of whether it is an in- or out-of-distribution problem. We then define and prove the relationship between generalized notions of learnability, and show how this framework is sufficiently general to characterize transfer, multitask, meta, continual, and lifelong learning. We hope this unification helps bridge the gap between empirical practice and theoretical guidance in real world problems. Finally, because biological learning continues to outperform machine learning algorithms on certain OOD challenges, we discuss the limitations of this framework vis-\'a-vis its ability to formalize biological learning, suggesting multiple avenues for future research.
Inducing a hierarchy for multi-class classification problems
Feb 20, 2021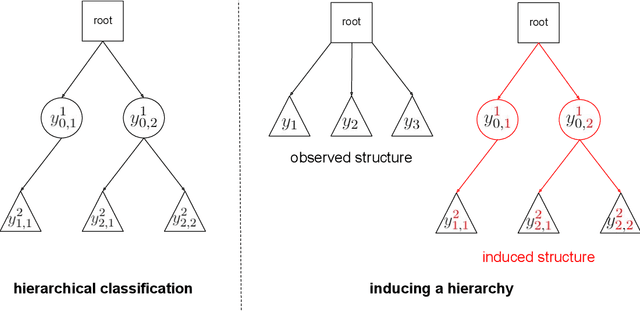
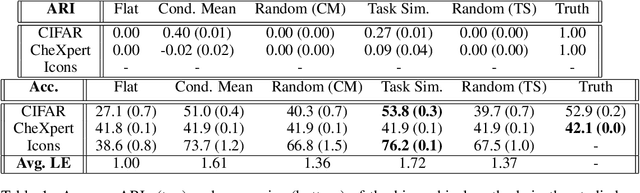
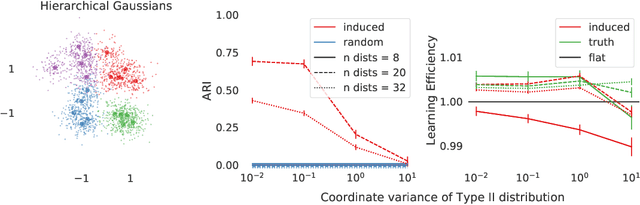
In applications where categorical labels follow a natural hierarchy, classification methods that exploit the label structure often outperform those that do not. Un-fortunately, the majority of classification datasets do not come pre-equipped with a hierarchical structure and classical flat classifiers must be employed. In this paper, we investigate a class of methods that induce a hierarchy that can similarly improve classification performance over flat classifiers. The class of methods follows the structure of first clustering the conditional distributions and subsequently using a hierarchical classifier with the induced hierarchy. We demonstrate the effectiveness of the class of methods both for discovering a latent hierarchy and for improving accuracy in principled simulation settings and three real data applications.
A partition-based similarity for classification distributions
Nov 12, 2020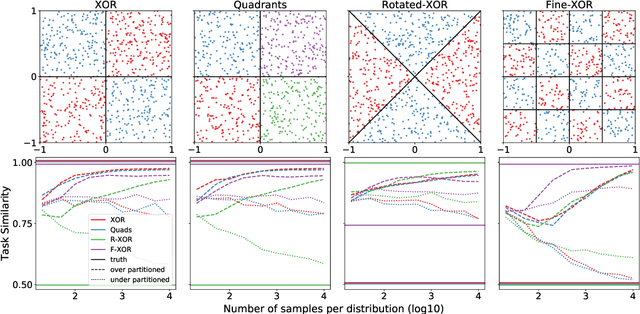
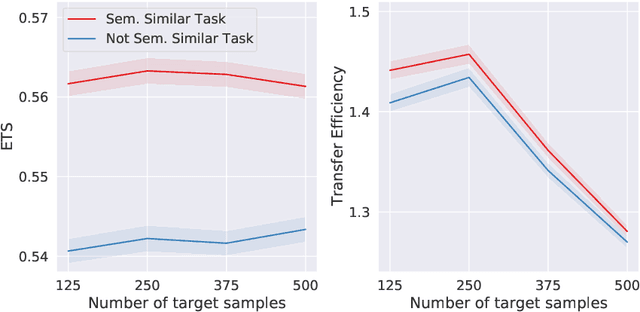
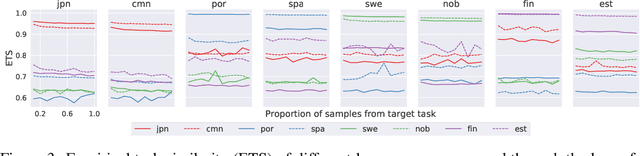
Herein we define a measure of similarity between classification distributions that is both principled from the perspective of statistical pattern recognition and useful from the perspective of machine learning practitioners. In particular, we propose a novel similarity on classification distributions, dubbed task similarity, that quantifies how an optimally-transformed optimal representation for a source distribution performs when applied to inference related to a target distribution. The definition of task similarity allows for natural definitions of adversarial and orthogonal distributions. We highlight limiting properties of representations induced by (universally) consistent decision rules and demonstrate in simulation that an empirical estimate of task similarity is a function of the decision rule deployed for inference. We demonstrate that for a given target distribution, both transfer efficiency and semantic similarity of candidate source distributions correlate with empirical task similarity.