 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGPT-4o System Card
Oct 25, 2024GPT-4o is an autoregressive omni model that accepts as input any combination of text, audio, image, and video, and generates any combination of text, audio, and image outputs. It's trained end-to-end across text, vision, and audio, meaning all inputs and outputs are processed by the same neural network. GPT-4o can respond to audio inputs in as little as 232 milliseconds, with an average of 320 milliseconds, which is similar to human response time in conversation. It matches GPT-4 Turbo performance on text in English and code, with significant improvement on text in non-English languages, while also being much faster and 50\% cheaper in the API. GPT-4o is especially better at vision and audio understanding compared to existing models. In line with our commitment to building AI safely and consistent with our voluntary commitments to the White House, we are sharing the GPT-4o System Card, which includes our Preparedness Framework evaluations. In this System Card, we provide a detailed look at GPT-4o's capabilities, limitations, and safety evaluations across multiple categories, focusing on speech-to-speech while also evaluating text and image capabilities, and measures we've implemented to ensure the model is safe and aligned. We also include third-party assessments on dangerous capabilities, as well as discussion of potential societal impacts of GPT-4o's text and vision capabilities.
Evaluating Large Language Models Trained on Code
Jul 14, 2021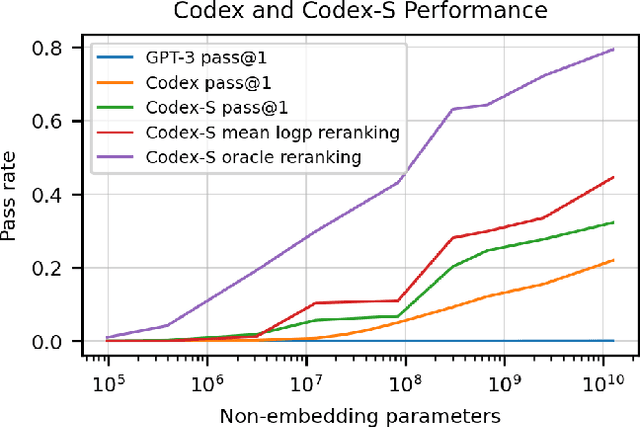
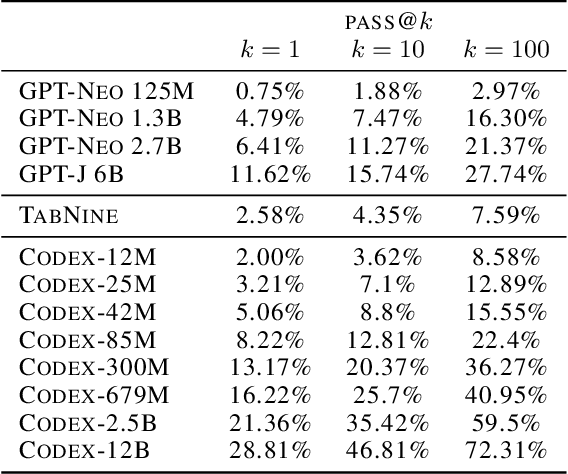
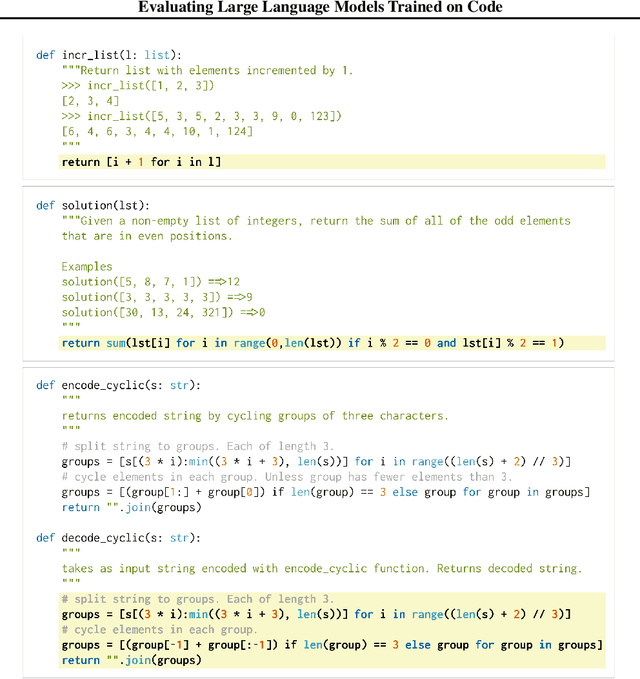
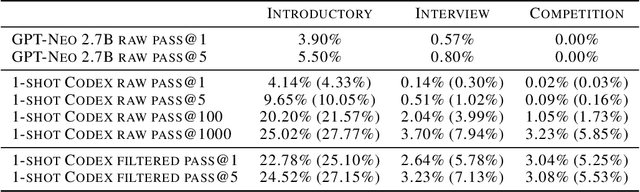
We introduce Codex, a GPT language model fine-tuned on publicly available code from GitHub, and study its Python code-writing capabilities. A distinct production version of Codex powers GitHub Copilot. On HumanEval, a new evaluation set we release to measure functional correctness for synthesizing programs from docstrings, our model solves 28.8% of the problems, while GPT-3 solves 0% and GPT-J solves 11.4%. Furthermore, we find that repeated sampling from the model is a surprisingly effective strategy for producing working solutions to difficult prompts. Using this method, we solve 70.2% of our problems with 100 samples per problem. Careful investigation of our model reveals its limitations, including difficulty with docstrings describing long chains of operations and with binding operations to variables. Finally, we discuss the potential broader impacts of deploying powerful code generation technologies, covering safety, security, and economics.
Asymmetric self-play for automatic goal discovery in robotic manipulation
Jan 13, 2021
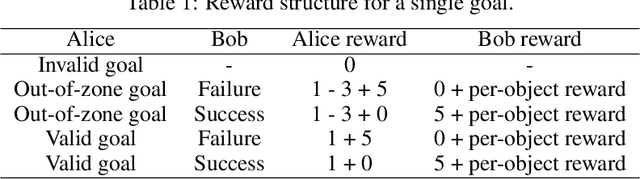
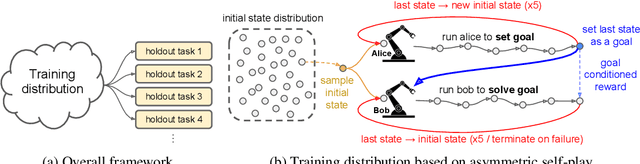
We train a single, goal-conditioned policy that can solve many robotic manipulation tasks, including tasks with previously unseen goals and objects. We rely on asymmetric self-play for goal discovery, where two agents, Alice and Bob, play a game. Alice is asked to propose challenging goals and Bob aims to solve them. We show that this method can discover highly diverse and complex goals without any human priors. Bob can be trained with only sparse rewards, because the interaction between Alice and Bob results in a natural curriculum and Bob can learn from Alice's trajectory when relabeled as a goal-conditioned demonstration. Finally, our method scales, resulting in a single policy that can generalize to many unseen tasks such as setting a table, stacking blocks, and solving simple puzzles. Videos of a learned policy is available at https://robotics-self-play.github.io.
Solving Rubik's Cube with a Robot Hand
Oct 16, 2019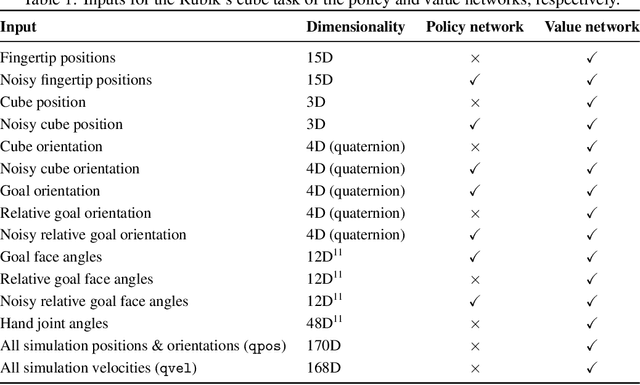
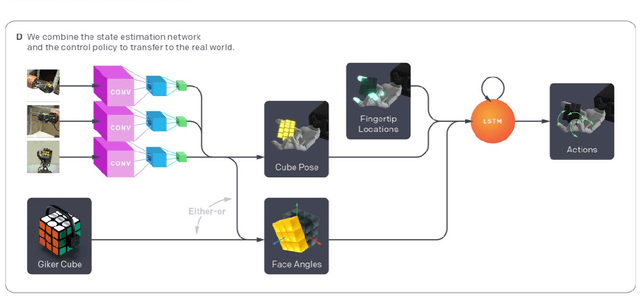
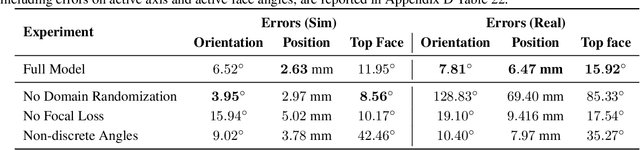
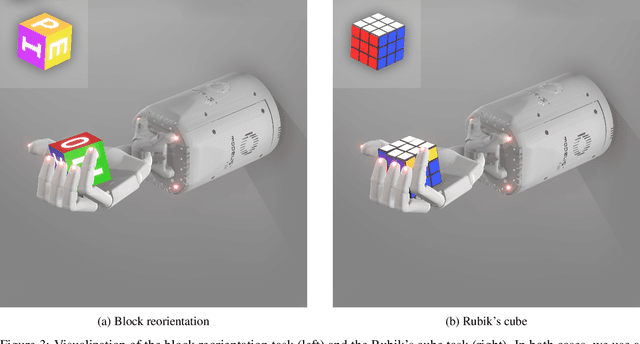
We demonstrate that models trained only in simulation can be used to solve a manipulation problem of unprecedented complexity on a real robot. This is made possible by two key components: a novel algorithm, which we call automatic domain randomization (ADR) and a robot platform built for machine learning. ADR automatically generates a distribution over randomized environments of ever-increasing difficulty. Control policies and vision state estimators trained with ADR exhibit vastly improved sim2real transfer. For control policies, memory-augmented models trained on an ADR-generated distribution of environments show clear signs of emergent meta-learning at test time. The combination of ADR with our custom robot platform allows us to solve a Rubik's cube with a humanoid robot hand, which involves both control and state estimation problems. Videos summarizing our results are available: https://openai.com/blog/solving-rubiks-cube/