 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdversarial Robustness with Semi-Infinite Constrained Learning
Oct 29, 2021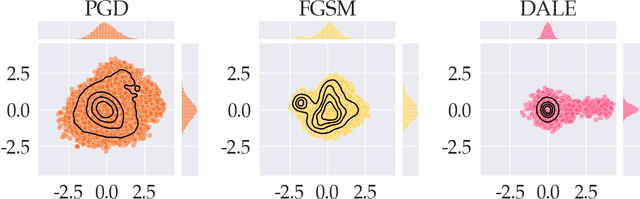
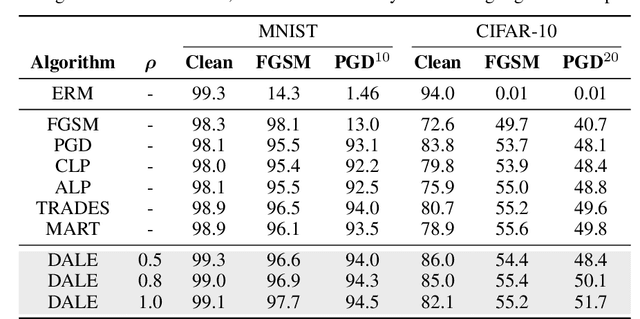
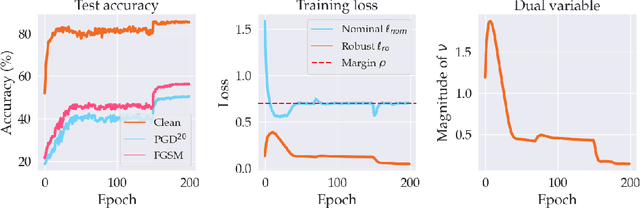
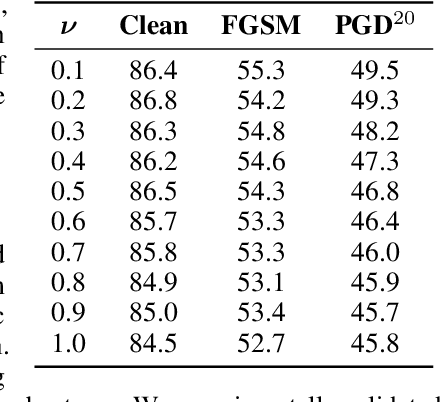
Despite strong performance in numerous applications, the fragility of deep learning to input perturbations has raised serious questions about its use in safety-critical domains. While adversarial training can mitigate this issue in practice, state-of-the-art methods are increasingly application-dependent, heuristic in nature, and suffer from fundamental trade-offs between nominal performance and robustness. Moreover, the problem of finding worst-case perturbations is non-convex and underparameterized, both of which engender a non-favorable optimization landscape. Thus, there is a gap between the theory and practice of adversarial training, particularly with respect to when and why adversarial training works. In this paper, we take a constrained learning approach to address these questions and to provide a theoretical foundation for robust learning. In particular, we leverage semi-infinite optimization and non-convex duality theory to show that adversarial training is equivalent to a statistical problem over perturbation distributions, which we characterize completely. Notably, we show that a myriad of previous robust training techniques can be recovered for particular, sub-optimal choices of these distributions. Using these insights, we then propose a hybrid Langevin Monte Carlo approach of which several common algorithms (e.g., PGD) are special cases. Finally, we show that our approach can mitigate the trade-off between nominal and robust performance, yielding state-of-the-art results on MNIST and CIFAR-10. Our code is available at: https://github.com/arobey1/advbench.
Stable and Transferable Wireless Resource Allocation Policies via Manifold Neural Networks
Oct 10, 2021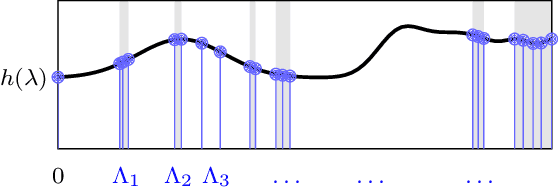
We consider the problem of resource allocation in large scale wireless networks. When contextualizing wireless network structures as graphs, we can model the limits of very large wireless systems as manifolds. To solve the problem in the machine learning framework, we propose the use of Manifold Neural Networks (MNNs) as a policy parametrization. In this work, we prove the stability of MNN resource allocation policies under the absolute perturbations to the Laplace-Beltrami operator of the manifold, representing system noise and dynamics present in wireless systems. These results establish the use of MNNs in achieving stable and transferable allocation policies for large scale wireless networks. We verify our results in numerical simulations that show superior performance relative to baseline methods.
Stability of Neural Networks on Manifolds to Relative Perturbations
Oct 10, 2021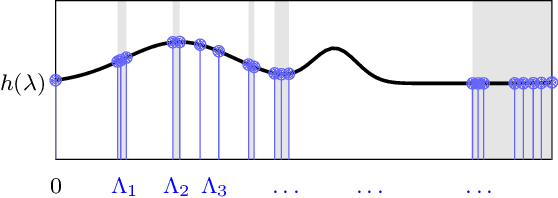
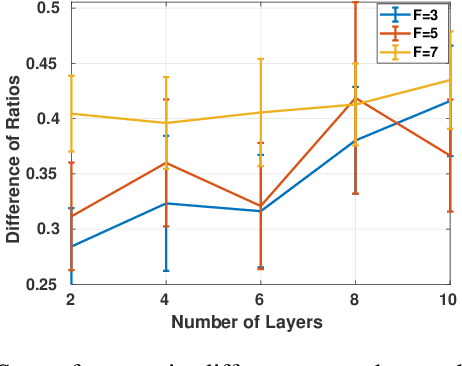
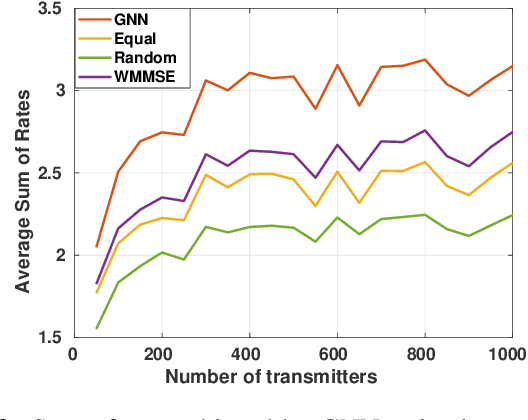
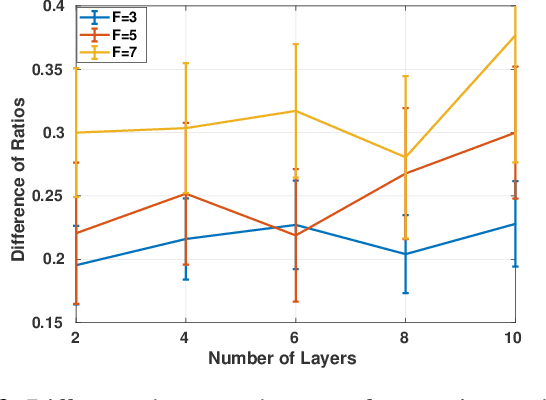
Graph Neural Networks (GNNs) show impressive performance in many practical scenarios, which can be largely attributed to their stability properties. Empirically, GNNs can scale well on large size graphs, but this is contradicted by the fact that existing stability bounds grow with the number of nodes. Graphs with well-defined limits can be seen as samples from manifolds. Hence, in this paper, we analyze the stability properties of convolutional neural networks on manifolds to understand the stability of GNNs on large graphs. Specifically, we focus on stability to relative perturbations of the Laplace-Beltrami operator. To start, we construct frequency ratio threshold filters which separate the infinite-dimensional spectrum of the Laplace-Beltrami operator. We then prove that manifold neural networks composed of these filters are stable to relative operator perturbations. As a product of this analysis, we observe that manifold neural networks exhibit a trade-off between stability and discriminability. Finally, we illustrate our results empirically in a wireless resource allocation scenario where the transmitter-receiver pairs are assumed to be sampled from a manifold.
Training Stable Graph Neural Networks Through Constrained Learning
Oct 07, 2021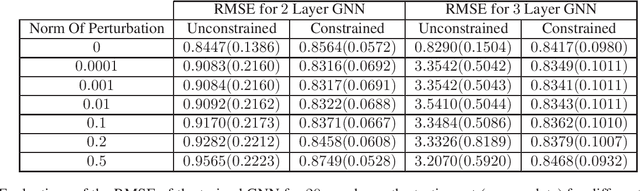
Graph Neural Networks (GNN) rely on graph convolutions to learn features from network data. GNNs are stable to different types of perturbations of the underlying graph, a property that they inherit from graph filters. In this paper we leverage the stability property of GNNs as a typing point in order to seek for representations that are stable within a distribution. We propose a novel constrained learning approach by imposing a constraint on the stability condition of the GNN within a perturbation of choice. We showcase our framework in real world data, corroborating that we are able to obtain more stable representations while not compromising the overall accuracy of the predictor.
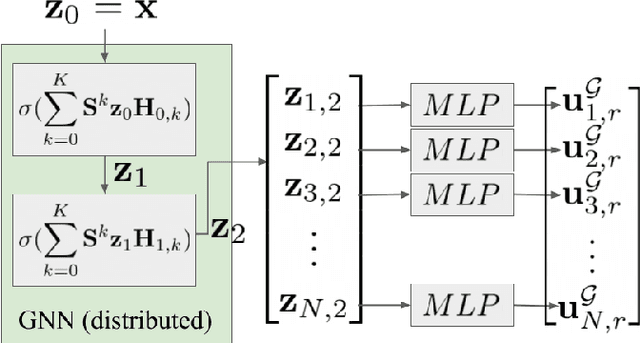
Space-Time Graph Neural Networks
Oct 06, 2021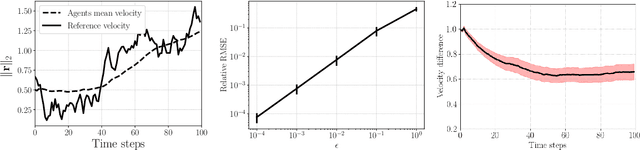
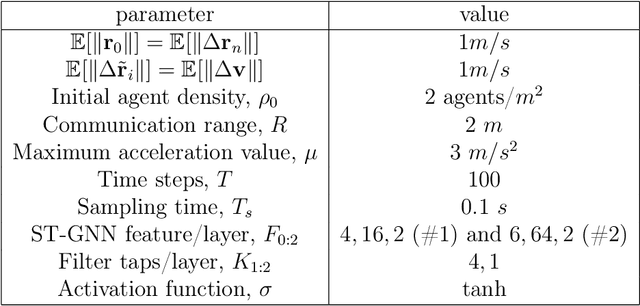
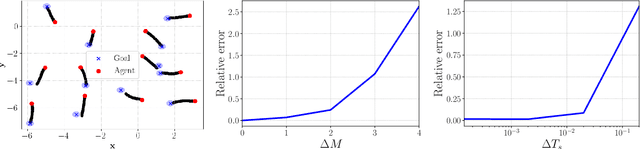
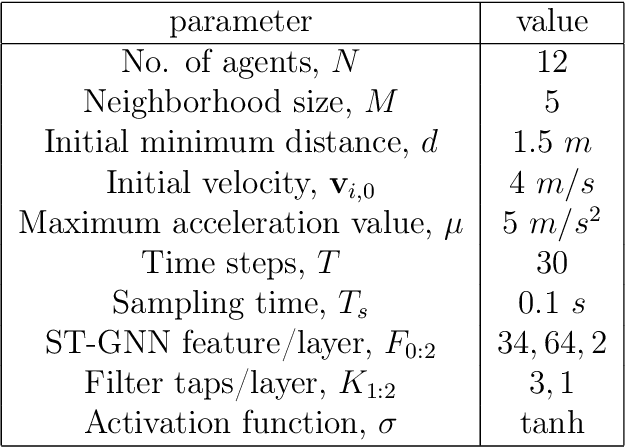
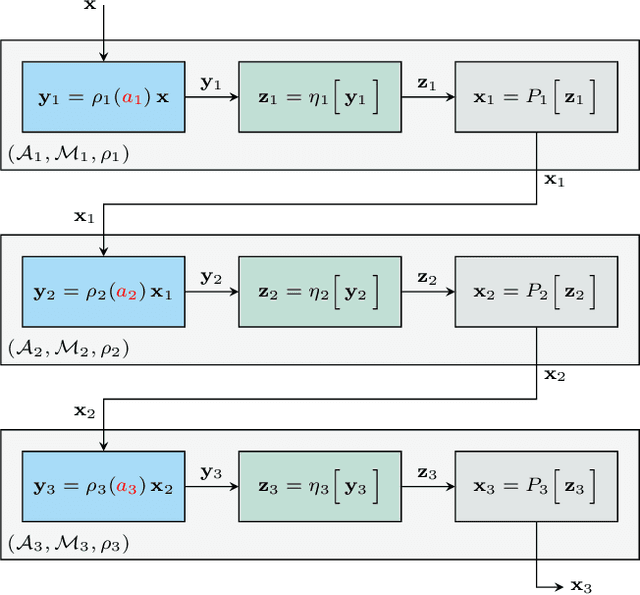
We introduce space-time graph neural network (ST-GNN), a novel GNN architecture, tailored to jointly process the underlying space-time topology of time-varying network data. The cornerstone of our proposed architecture is the composition of time and graph convolutional filters followed by pointwise nonlinear activation functions. We introduce a generic definition of convolution operators that mimic the diffusion process of signals over its underlying support. On top of this definition, we propose space-time graph convolutions that are built upon a composition of time and graph shift operators. We prove that ST-GNNs with multivariate integral Lipschitz filters are stable to small perturbations in the underlying graphs as well as small perturbations in the time domain caused by time warping. Our analysis shows that small variations in the network topology and time evolution of a system does not significantly affect the performance of ST-GNNs. Numerical experiments with decentralized control systems showcase the effectiveness and stability of the proposed ST-GNNs.
Coverage Control in Multi-Robot Systems via Graph Neural Networks
Sep 30, 2021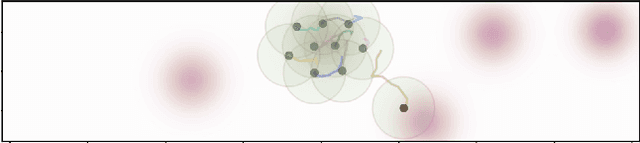
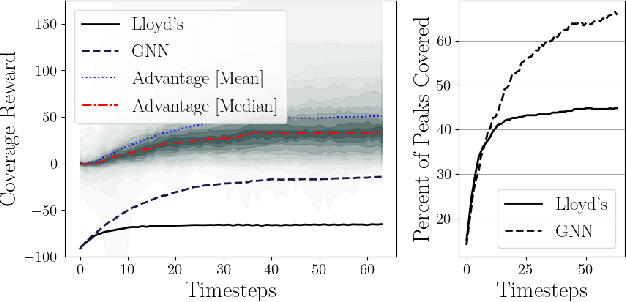
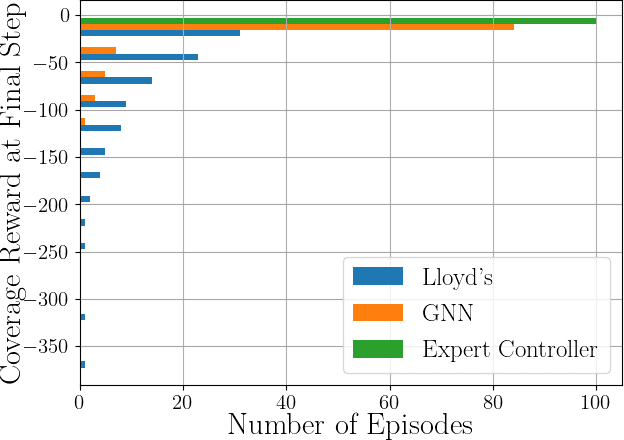
This paper develops a decentralized approach to mobile sensor coverage by a multi-robot system. We consider a scenario where a team of robots with limited sensing range must position itself to effectively detect events of interest in a region characterized by areas of varying importance. Towards this end, we develop a decentralized control policy for the robots -- realized via a Graph Neural Network -- which uses inter-robot communication to leverage non-local information for control decisions. By explicitly sharing information between multi-hop neighbors, the decentralized controller achieves a higher quality of coverage when compared to classical approaches that do not communicate and leverage only local information available to each robot. Simulated experiments demonstrate the efficacy of multi-hop communication for multi-robot coverage and evaluate the scalability and transferability of the learning-based controllers.
Convolutional Filtering and Neural Networks with Non Commutative Algebras
Aug 23, 2021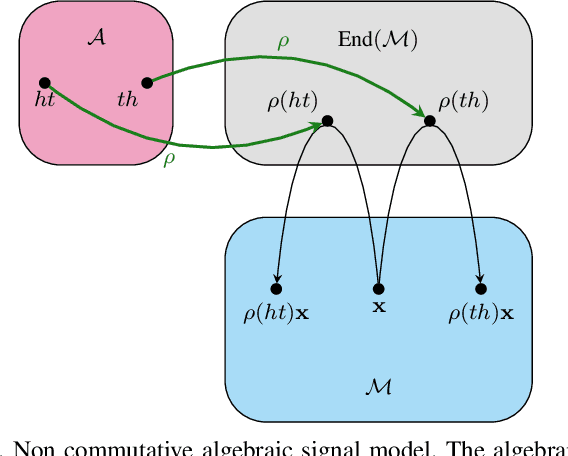
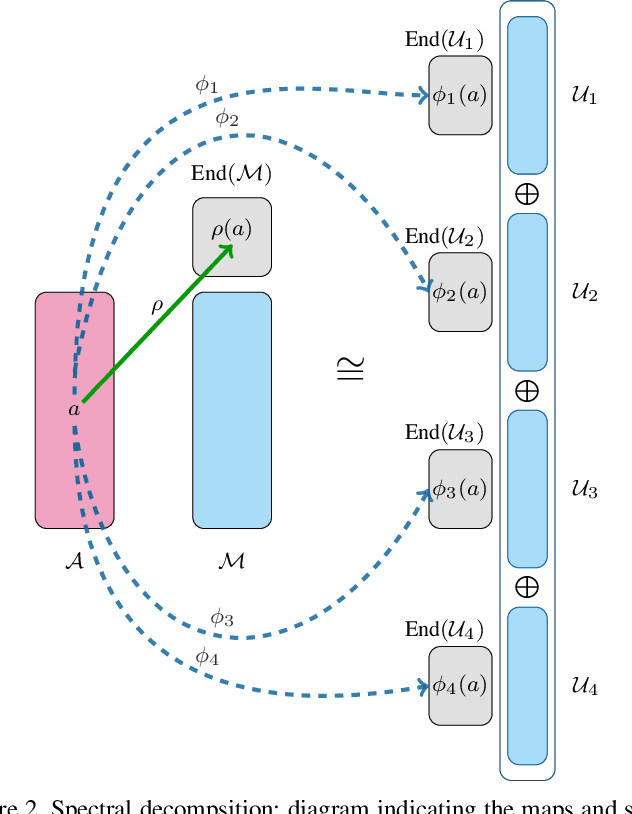
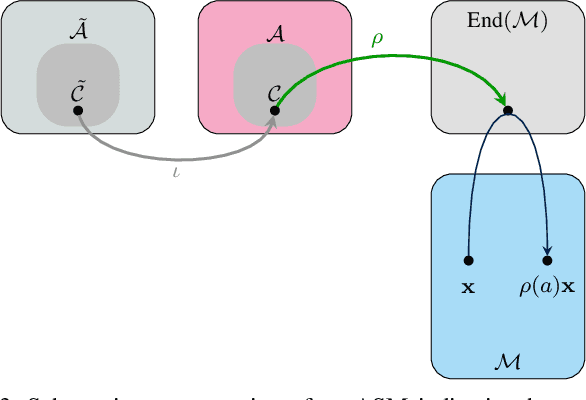
In this paper we provide stability results for algebraic neural networks (AlgNNs) based on non commutative algebras. AlgNNs are stacked layered structures with each layer associated to an algebraic signal model (ASM) determined by an algebra, a vector space, and a homomorphism. Signals are modeled as elements of the vector space, filters are elements in the algebra, while the homomorphism provides a realization of the filters as concrete operators. We study the stability of the algebraic filters in non commutative algebras to perturbations on the homomorphisms, and we provide conditions under which stability is guaranteed. We show that the commutativity between shift operators and between shifts and perturbations does not affect the property of an architecture of being stable. This provides an answer to the question of whether shift invariance was a necessary attribute of convolutional architectures to guarantee stability. Additionally, we show that although the frequency responses of filters in non commutative algebras exhibit substantial differences with respect to filters in commutative algebras, their derivatives for stable filters have a similar behavior.
Wide and Deep Graph Neural Network with Distributed Online Learning
Jul 19, 2021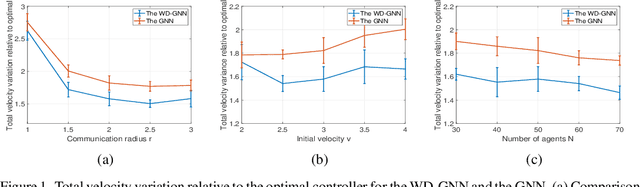
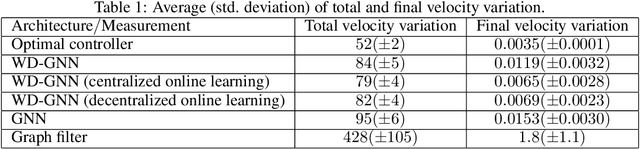
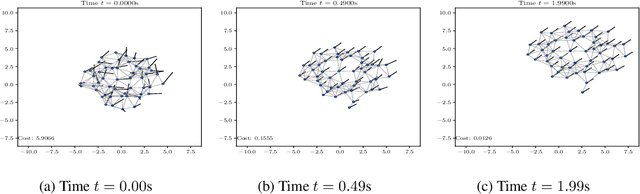
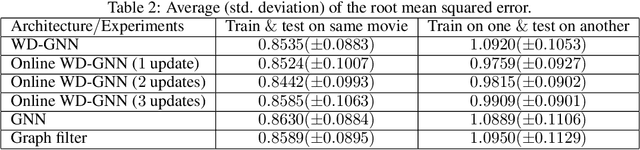
Graph neural networks (GNNs) are naturally distributed architectures for learning representations from network data. This renders them suitable candidates for decentralized tasks. In these scenarios, the underlying graph often changes with time due to link failures or topology variations, creating a mismatch between the graphs on which GNNs were trained and the ones on which they are tested. Online learning can be leveraged to retrain GNNs at testing time to overcome this issue. However, most online algorithms are centralized and usually offer guarantees only on convex problems, which GNNs rarely lead to. This paper develops the Wide and Deep GNN (WD-GNN), a novel architecture that can be updated with distributed online learning mechanisms. The WD-GNN consists of two components: the wide part is a linear graph filter and the deep part is a nonlinear GNN. At training time, the joint wide and deep architecture learns nonlinear representations from data. At testing time, the wide, linear part is retrained, while the deep, nonlinear one remains fixed. This often leads to a convex formulation. We further propose a distributed online learning algorithm that can be implemented in a decentralized setting. We also show the stability of the WD-GNN to changes of the underlying graph and analyze the convergence of the proposed online learning procedure. Experiments on movie recommendation, source localization and robot swarm control corroborate theoretical findings and show the potential of the WD-GNN for distributed online learning.
Learning Decentralized Wireless Resource Allocations with Graph Neural Networks
Jul 03, 2021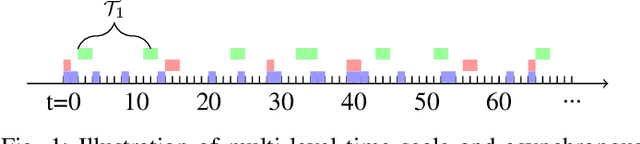
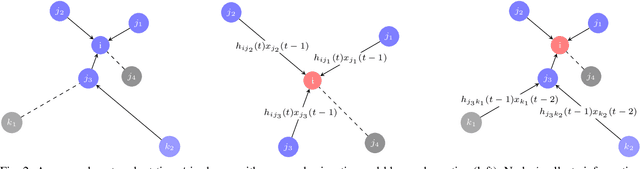
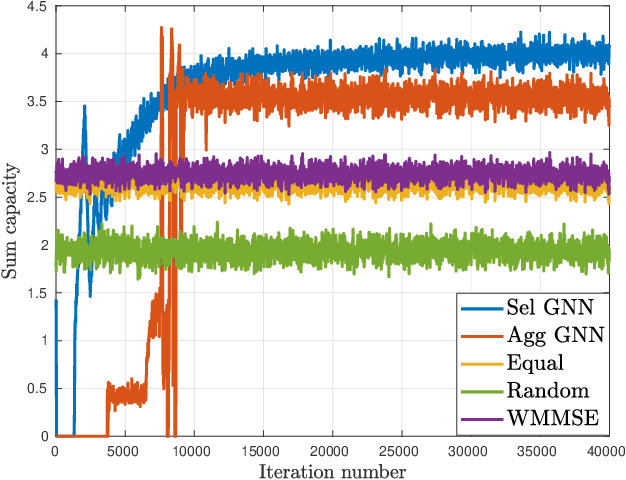
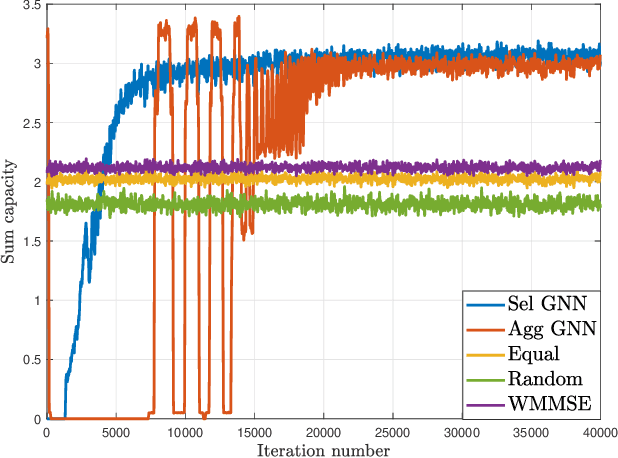
We consider the broad class of decentralized optimal resource allocation problems in wireless networks, which can be formulated as a constrained statistical learning problems with a localized information structure. We develop the use of Aggregation Graph Neural Networks (Agg-GNNs), which process a sequence of delayed and potentially asynchronous graph aggregated state information obtained locally at each transmitter from multi-hop neighbors. We further utilize model-free primal-dual learning methods to optimize performance subject to constraints in the presence of delay and asynchrony inherent to decentralized networks. We demonstrate a permutation equivariance property of the resulting resource allocation policy that can be shown to facilitate transference to dynamic network configurations. The proposed framework is validated with numerical simulations that exhibit superior performance to baseline strategies.
Scalable Perception-Action-Communication Loops with Convolutional and Graph Neural Networks
Jun 24, 2021In this paper, we present a perception-action-communication loop design using Vision-based Graph Aggregation and Inference (VGAI). This multi-agent decentralized learning-to-control framework maps raw visual observations to agent actions, aided by local communication among neighboring agents. Our framework is implemented by a cascade of a convolutional and a graph neural network (CNN / GNN), addressing agent-level visual perception and feature learning, as well as swarm-level communication, local information aggregation and agent action inference, respectively. By jointly training the CNN and GNN, image features and communication messages are learned in conjunction to better address the specific task. We use imitation learning to train the VGAI controller in an offline phase, relying on a centralized expert controller. This results in a learned VGAI controller that can be deployed in a distributed manner for online execution. Additionally, the controller exhibits good scaling properties, with training in smaller teams and application in larger teams. Through a multi-agent flocking application, we demonstrate that VGAI yields performance comparable to or better than other decentralized controllers, using only the visual input modality and without accessing precise location or motion state information.