 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Accurate online training of dynamical spiking neural networks through Forward Propagation Through Time
Dec 20, 2021
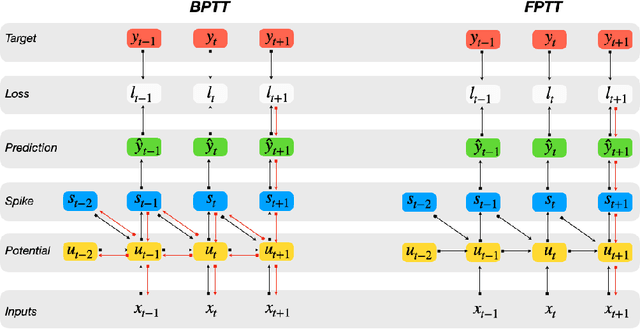
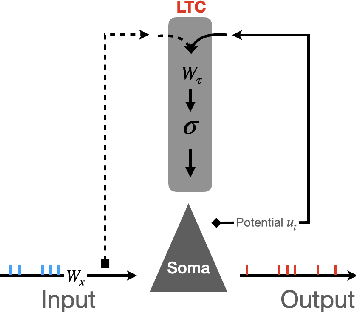
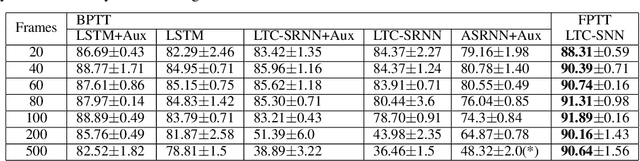
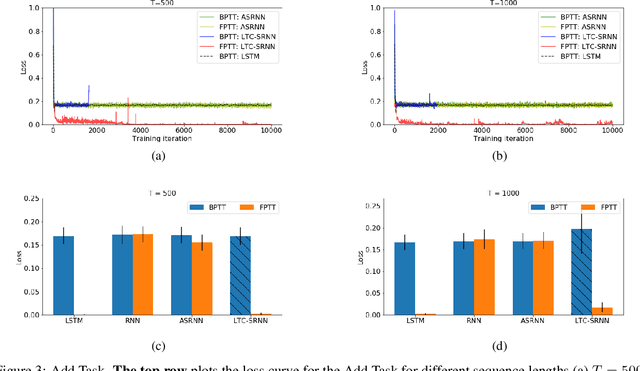
The event-driven and sparse nature of communication between spiking neurons in the brain holds great promise for flexible and energy-efficient AI. Recent advances in learning algorithms have demonstrated that recurrent networks of spiking neurons can be effectively trained to achieve competitive performance compared to standard recurrent neural networks. Still, as these learning algorithms use error-backpropagation through time (BPTT), they suffer from high memory requirements, are slow to train, and are incompatible with online learning. This limits the application of these learning algorithms to relatively small networks and to limited temporal sequence lengths. Online approximations to BPTT with lower computational and memory complexity have been proposed (e-prop, OSTL), but in practice also suffer from memory limitations and, as approximations, do not outperform standard BPTT training. Here, we show how a recently developed alternative to BPTT, Forward Propagation Through Time (FPTT) can be applied in spiking neural networks. Different from BPTT, FPTT attempts to minimize an ongoing dynamically regularized risk on the loss. As a result, FPTT can be computed in an online fashion and has fixed complexity with respect to the sequence length. When combined with a novel dynamic spiking neuron model, the Liquid-Time-Constant neuron, we show that SNNs trained with FPTT outperform online BPTT approximations, and approach or exceed offline BPTT accuracy on temporal classification tasks. This approach thus makes it feasible to train SNNs in a memory-friendly online fashion on long sequences and scale up SNNs to novel and complex neural architectures.
Dynamic Maintenance of Kernel Density Estimation Data Structure: From Practice to Theory
Aug 08, 2022Kernel density estimation (KDE) stands out as a challenging task in machine learning. The problem is defined in the following way: given a kernel function $f(x,y)$ and a set of points $\{x_1, x_2, \cdots, x_n \} \subset \mathbb{R}^d$, we would like to compute $\frac{1}{n}\sum_{i=1}^{n} f(x_i,y)$ for any query point $y \in \mathbb{R}^d$. Recently, there has been a growing trend of using data structures for efficient KDE. However, the proposed KDE data structures focus on static settings. The robustness of KDE data structures over dynamic changing data distributions is not addressed. In this work, we focus on the dynamic maintenance of KDE data structures with robustness to adversarial queries. Especially, we provide a theoretical framework of KDE data structures. In our framework, the KDE data structures only require subquadratic spaces. Moreover, our data structure supports the dynamic update of the dataset in sublinear time. Furthermore, we can perform adaptive queries with the potential adversary in sublinear time.
Intelligent Perception System for Vehicle-Road Cooperation
Aug 30, 2022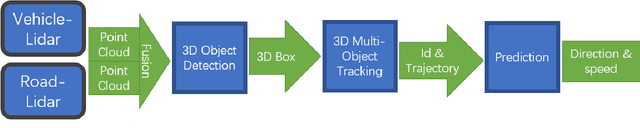
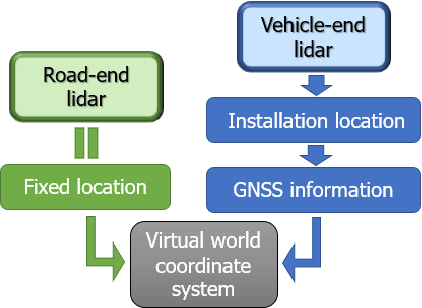
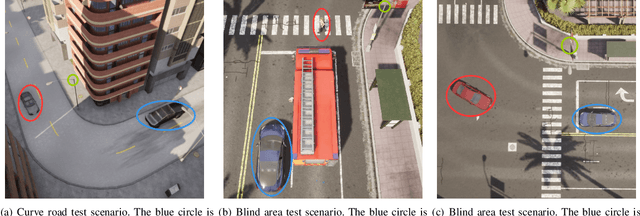
With the development of autonomous driving, the improvement of autonomous driving technology for individual vehicles has reached the bottleneck. The advancement of vehicle-road cooperation autonomous driving technology can expand the vehicle's perception range, supplement the perception blind area and improve the perception accuracy, to promote the development of autonomous driving technology and achieve vehicle-road integration. This project mainly uses lidar to develop data fusion schemes to realize the sharing and combination of vehicle and road equipment data and achieve the detection and tracking of dynamic targets. At the same time, some test scenarios for the vehicle-road cooperative system were designed and used to test our vehicle-road cooperative awareness system, which proved the advantages of vehicle-road cooperative autonomous driving over single-vehicle autonomous driving.
Multiscale Adaptive Scheduling and Path-Planning for Power-Constrained UAV-Relays via SMDPs
Sep 16, 2022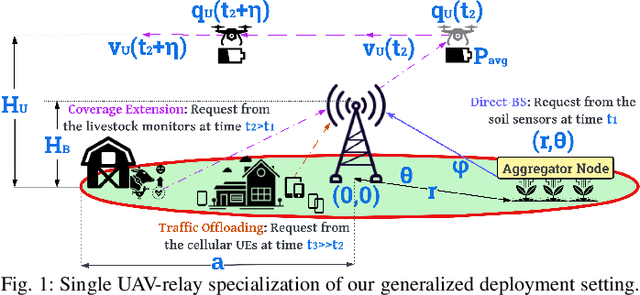
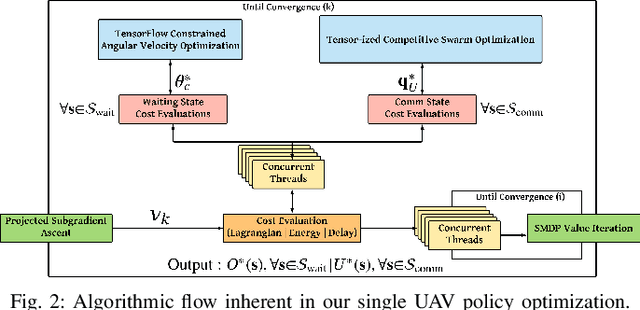
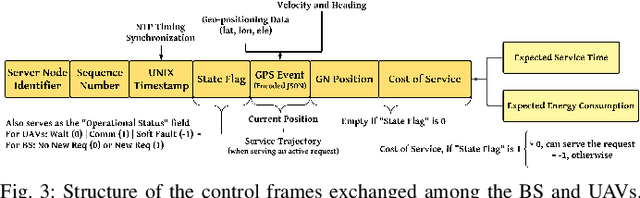
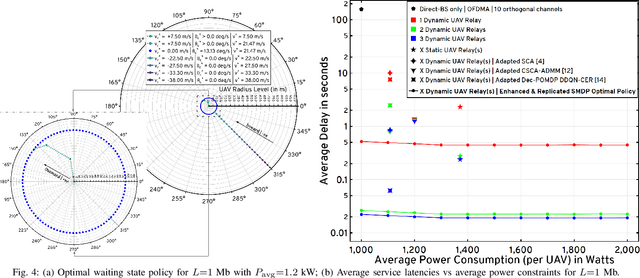
We describe the orchestration of a decentralized swarm of rotary-wing UAV-relays, augmenting the coverage and service capabilities of a terrestrial base station. Our goal is to minimize the time-average service latencies involved in handling transmission requests from ground users under Poisson arrivals, subject to an average UAV power constraint. Equipped with rate adaptation to efficiently leverage air-to-ground channel stochastics, we first derive the optimal control policy for a single relay via a semi-Markov decision process formulation, with competitive swarm optimization for UAV trajectory design. Accordingly, we detail a multiscale decomposition of this construction: outer decisions on radial wait velocities and end positions optimize the expected long-term delay-power trade-off; consequently, inner decisions on angular wait velocities, service schedules, and UAV trajectories greedily minimize the instantaneous delay-power costs. Next, generalizing to UAV swarms via replication and consensus-driven command-and-control, this policy is embedded with spread maximization and conflict resolution heuristics. We demonstrate that our framework offers superior performance vis-\`a-vis average service latencies and average per-UAV power consumption: 11x faster data payload delivery relative to static UAV-relay deployments and 2x faster than a deep-Q network solution; remarkably, one relay with our scheme outclasses three relays under a joint successive convex approximation policy by 62%.
Supervised GAN Watermarking for Intellectual Property Protection
Sep 07, 2022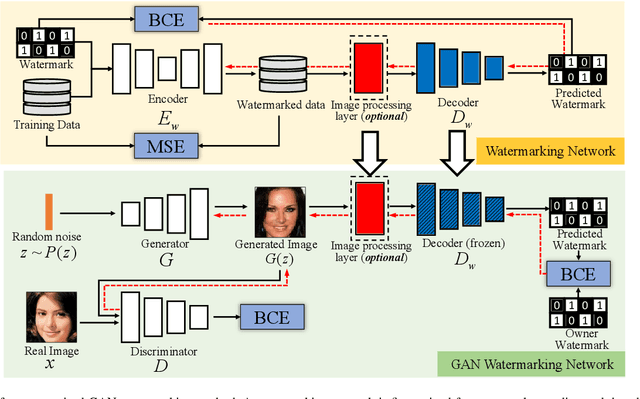
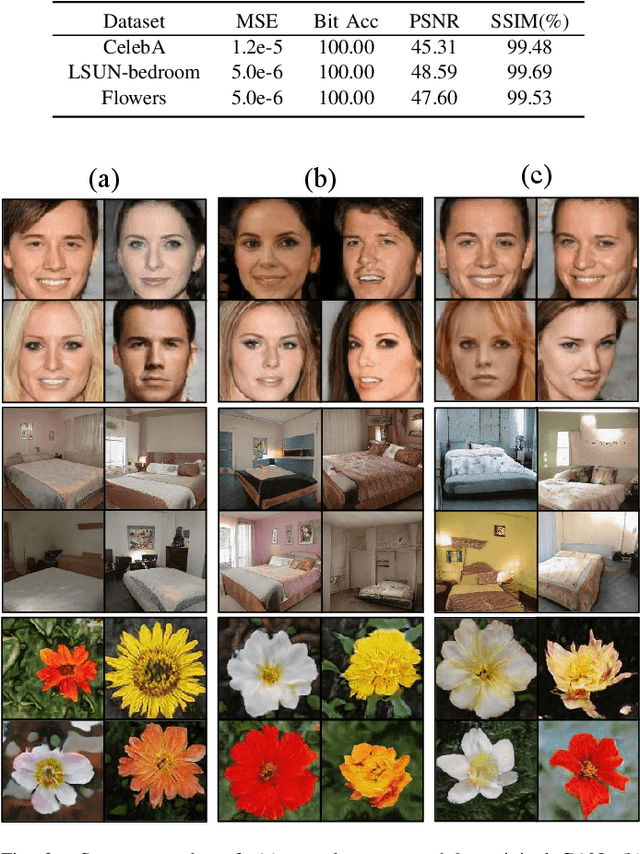
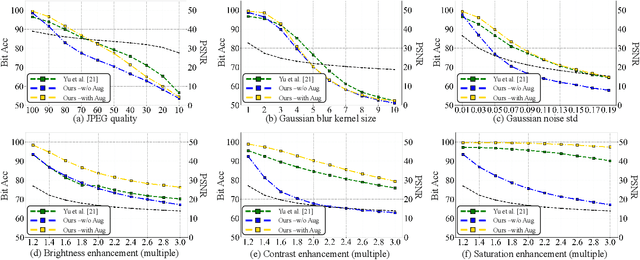
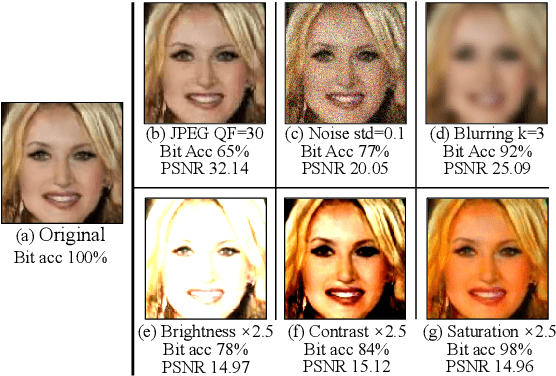
We propose a watermarking method for protecting the Intellectual Property (IP) of Generative Adversarial Networks (GANs). The aim is to watermark the GAN model so that any image generated by the GAN contains an invisible watermark (signature), whose presence inside the image can be checked at a later stage for ownership verification. To achieve this goal, a pre-trained CNN watermarking decoding block is inserted at the output of the generator. The generator loss is then modified by including a watermark loss term, to ensure that the prescribed watermark can be extracted from the generated images. The watermark is embedded via fine-tuning, with reduced time complexity. Results show that our method can effectively embed an invisible watermark inside the generated images. Moreover, our method is a general one and can work with different GAN architectures, different tasks, and different resolutions of the output image. We also demonstrate the good robustness performance of the embedded watermark against several post-processing, among them, JPEG compression, noise addition, blurring, and color transformations.
Benchmark Results for Bookshelf Organization Problem as Mixed Integer Nonlinear Program with Mode Switch and Collision Avoidance
Aug 28, 2022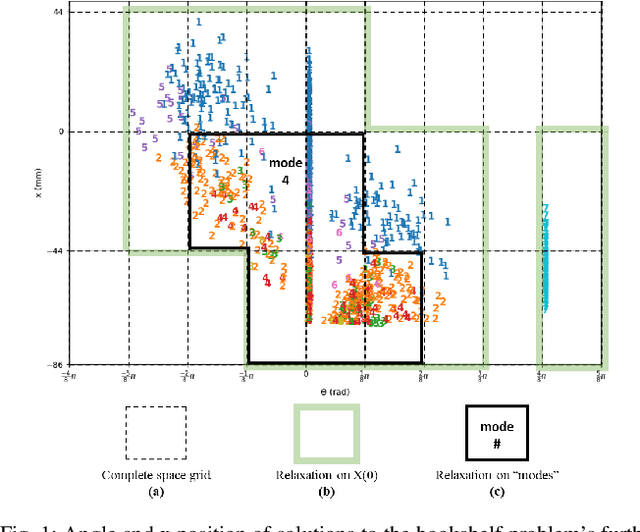
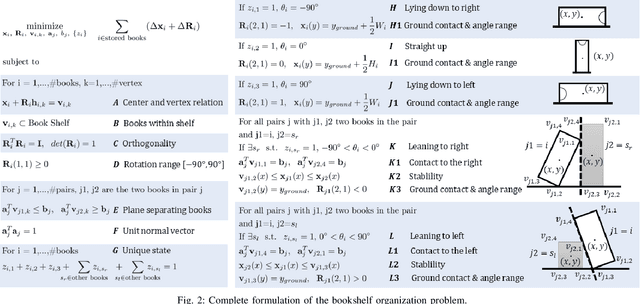

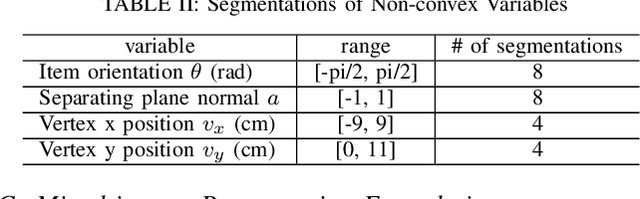
Mixed integer convex and nonlinear programs, MICP and MINLP, are expressive but require long solving times. Recent work that combines data-driven methods on solver heuristics has shown potential to overcome this issue allowing for applications on larger scale practical problems. To solve mixed-integer bilinear programs online with data-driven methods, several formulations exist including mathematical programming with complementary constraints (MPCC), mixed-integer programming (MIP). In this work, we benchmark the performances of those data-driven schemes on a bookshelf organization problem that has discrete mode switch and collision avoidance constraints. The success rate, optimal cost and solving time are compared along with non-data-driven methods. Our proposed methods are demonstrated as a high level planner for a robotic arm for the bookshelf problem.
CLINS: Continuous-Time Trajectory Estimation for LiDAR-Inertial System
Sep 10, 2021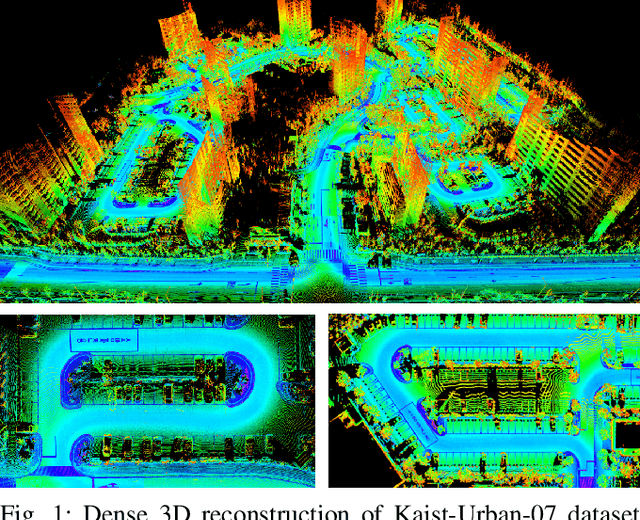
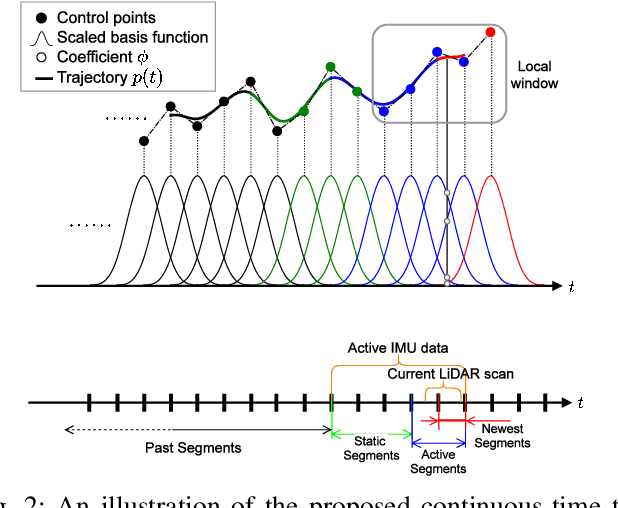
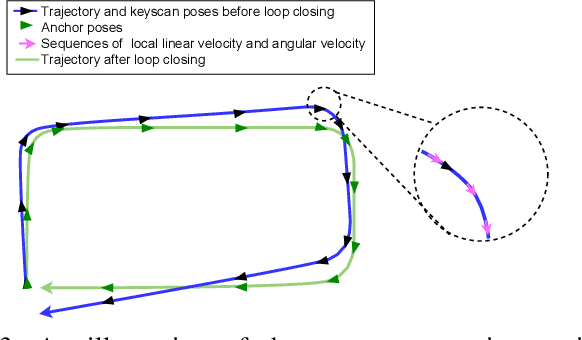
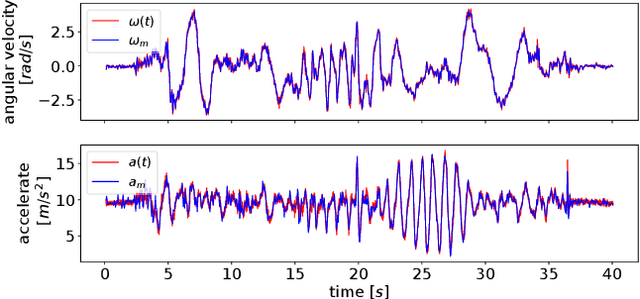
In this paper, we propose a highly accurate continuous-time trajectory estimation framework dedicated to SLAM (Simultaneous Localization and Mapping) applications, which enables fuse high-frequency and asynchronous sensor data effectively. We apply the proposed framework in a 3D LiDAR-inertial system for evaluations. The proposed method adopts a non-rigid registration method for continuous-time trajectory estimation and simultaneously removing the motion distortion in LiDAR scans. Additionally, we propose a two-state continuous-time trajectory correction method to efficiently and efficiently tackle the computationally-intractable global optimization problem when loop closure happens. We examine the accuracy of the proposed approach on several publicly available datasets and the data we collected. The experimental results indicate that the proposed method outperforms the discrete-time methods regarding accuracy especially when aggressive motion occurs. Furthermore, we open source our code at \url{https://github.com/APRIL-ZJU/clins} to benefit research community.
Improving Fuzzy-Logic based Map-Matching Method with Trajectory Stay-Point Detection
Aug 04, 2022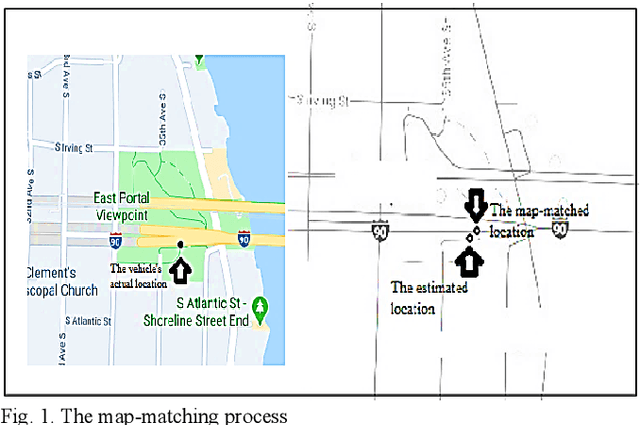
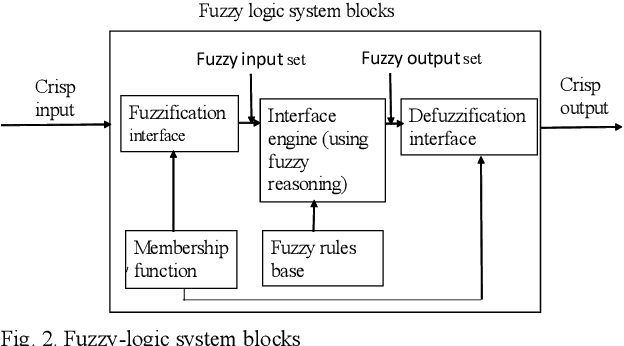
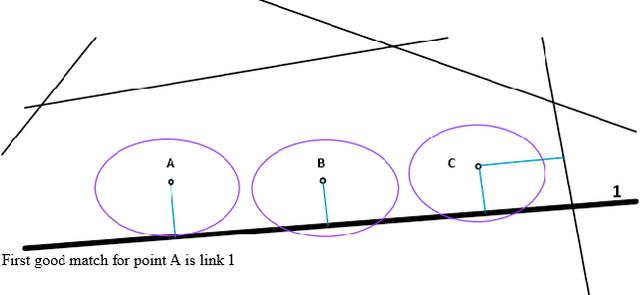
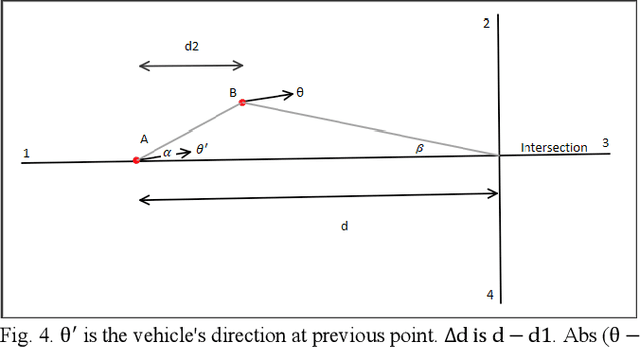
The requirement to trace and process moving objects in the contemporary era gradually increases since numerous applications quickly demand precise moving object locations. The Map-matching method is employed as a preprocessing technique, which matches a moving object point on a corresponding road. However, most of the GPS trajectory datasets include stay-points irregularity, which makes map-matching algorithms mismatch trajectories to irrelevant streets. Therefore, determining the stay-point region in GPS trajectory datasets results in better accurate matching and more rapid approaches. In this work, we cluster stay-points in a trajectory dataset with DBSCAN and eliminate redundant data to improve the efficiency of the map-matching algorithm by lowering processing time. We reckoned our proposed method's performance and exactness with a ground truth dataset compared to a fuzzy-logic based map-matching algorithm. Fortunately, our approach yields 27.39% data size reduction and 8.9% processing time reduction with the same accurate results as the previous fuzzy-logic based map-matching approach.
Post-Train Adaptive MobileNet for Fast Anti-Spoofing
Jul 27, 2022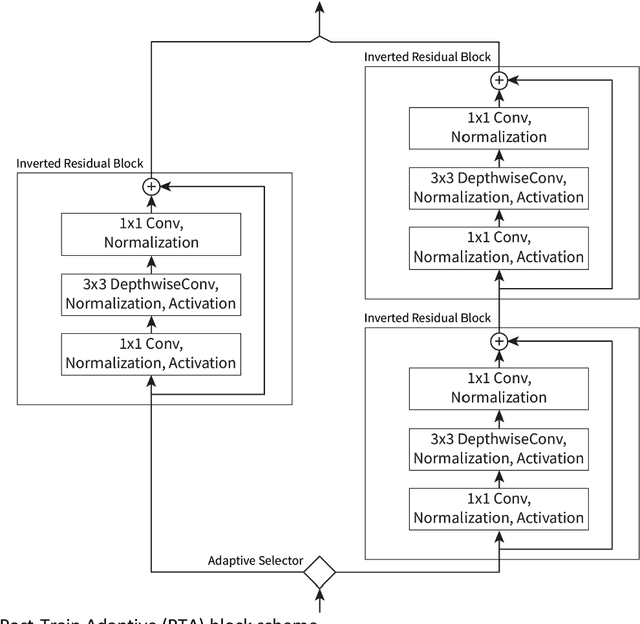
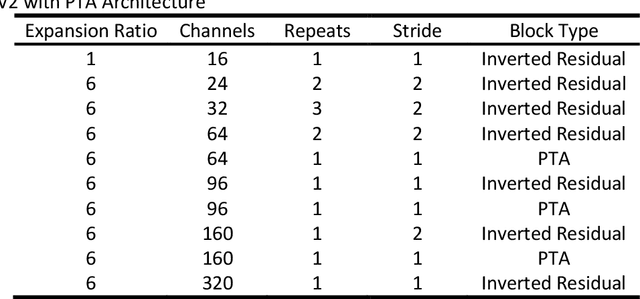
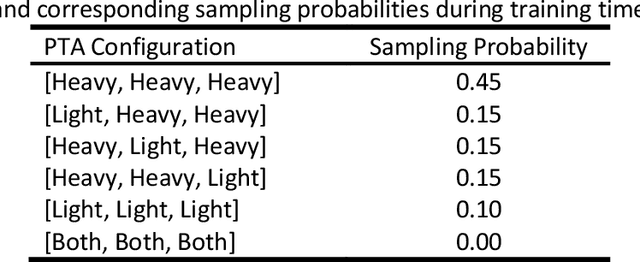
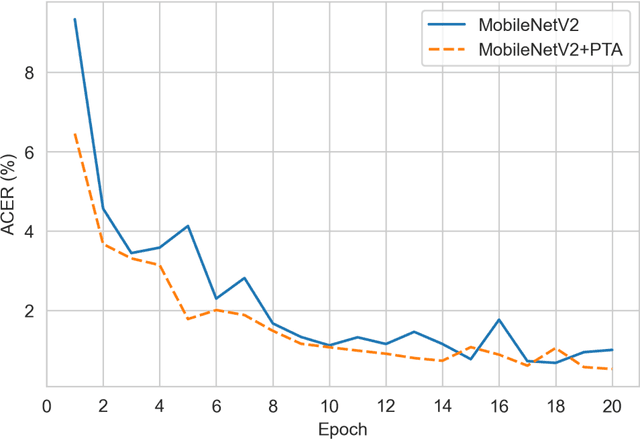
Many applications require high accuracy of neural networks as well as low latency and user data privacy guaranty. Face anti-spoofing is one of such tasks. However, a single model might not give the best results for different device performance categories, while training multiple models is time consuming. In this work we present Post-Train Adaptive (PTA) block. Such a block is simple in structure and offers a drop-in replacement for the MobileNetV2 Inverted Residual block. The PTA block has multiple branches with different computation costs. The branch to execute can be selected on-demand and at runtime; thus, offering different inference times and configuration capability for multiple device tiers. Crucially, the model is trained once and can be easily reconfigured after training, even directly on a mobile device. In addition, the proposed approach shows substantially better overall performance in comparison to the original MobileNetV2 as tested on CelebA-Spoof dataset. Different PTA block configurations are sampled at training time, which also decreases overall wall-clock time needed to train the model. While we present computational results for the anti-spoofing problem, the MobileNetV2 with PTA blocks is applicable to any problem solvable with convolutional neural networks, which makes the results presented practically significant.
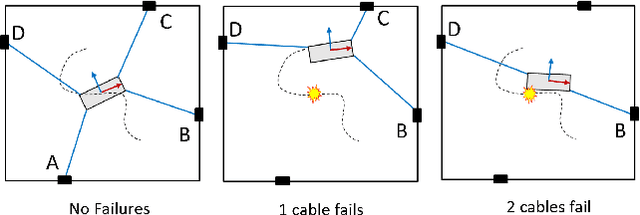
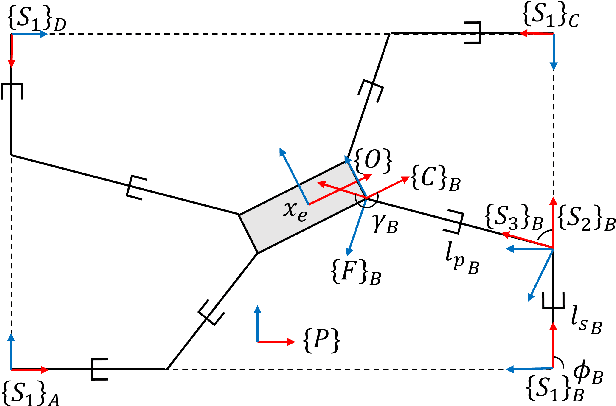
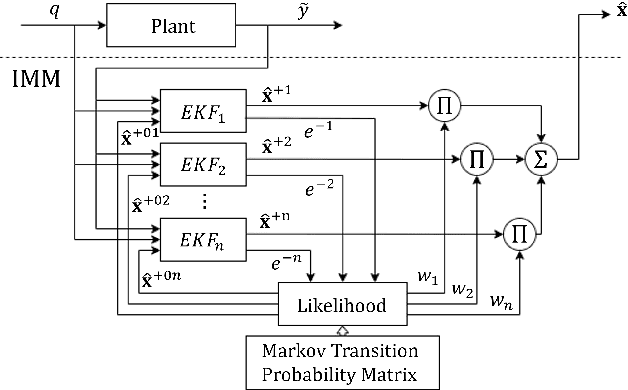
A Failure Identification and Recovery Framework for a Planar Reconfigurable Cable Driven Parallel Robot
Sep 02, 2022
In cable driven parallel robots (CDPRs), a single cable malfunction usually induces complete failure of the entire robot. However, the lost static workspace (due to failure) can often be recovered through reconfiguration of the cable attachment points on the frame. This capability is introduced by adding kinematic redundancies to the robot in the form of moving linear sliders that are manipulated in a real-time redundancy resolution controller. The presented work combines this controller with an online failure detection framework to develop a complete fault tolerant control scheme for automatic task recovery. This solution provides robustness by combining pose estimation of the end-effector with the failure detection through the application of an Interactive Multiple Model (IMM) algorithm relying only on end-effector information. The failure and pose estimation scheme is then tied into the redundancy resolution approach to produce a seamless automatic task (trajectory) recovery approach for cable failures.