 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Information": models, code, and papers
ARIST: An Effective API Argument Recommendation Approach
Jun 11, 2023
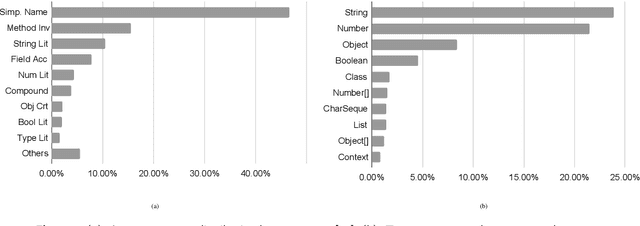
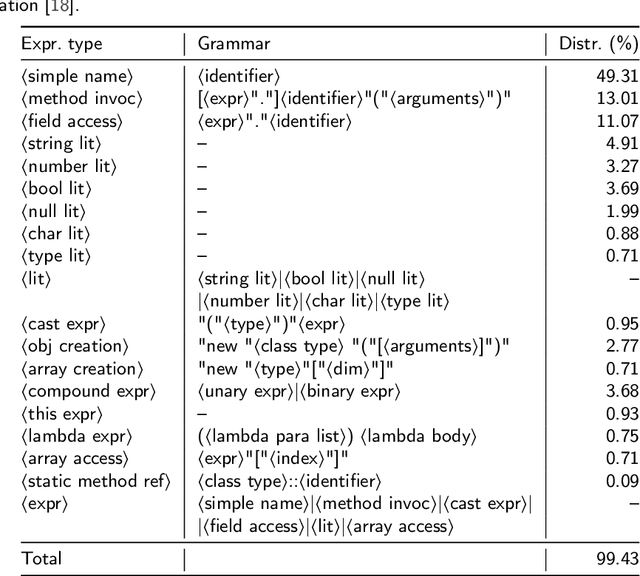
Learning and remembering to use APIs are difficult. Several techniques have been proposed to assist developers in using APIs. Most existing techniques focus on recommending the right API methods to call, but very few techniques focus on recommending API arguments. In this paper, we propose ARIST, a novel automated argument recommendation approach which suggests arguments by predicting developers' expectations when they define and use API methods. To implement this idea in the recommendation process, ARIST combines program analysis (PA), language models (LMs), and several features specialized for the recommendation task which consider the functionality of formal parameters and the positional information of code elements (e.g., variables or method calls) in the given context. In ARIST, the LMs and the recommending features are used to suggest the promising candidates identified by PA. Meanwhile, PA navigates the LMs and the features working on the set of the valid candidates which satisfy syntax, accessibility, and type-compatibility constraints defined by the programming language in use. Our evaluation on a large dataset of real-world projects shows that ARIST improves the state-of-the-art approach by 19% and 18% in top-1 precision and recall for recommending arguments of frequently-used libraries. For general argument recommendation task, i.e., recommending arguments for every method call, ARIST outperforms the baseline approaches by up to 125% top-1 accuracy. Moreover, for newly-encountered projects, ARIST achieves more than 60% top-3 accuracy when evaluating on a larger dataset. For working/maintaining projects, with a personalized LM to capture developers' coding practice, ARIST can productively rank the expected arguments at the top-1 position in 7/10 requests.
A Teacher-Student approach for extracting informative speaker embeddings from speech mixtures
Jun 01, 2023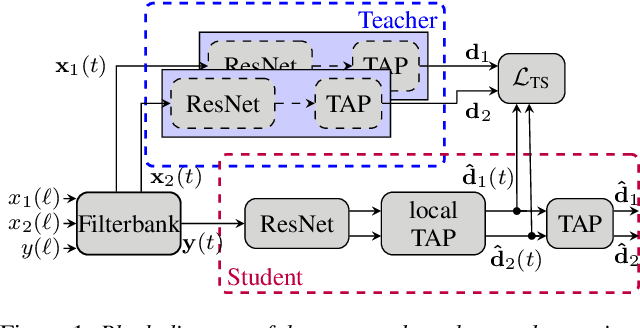
We introduce a monaural neural speaker embeddings extractor that computes an embedding for each speaker present in a speech mixture. To allow for supervised training, a teacher-student approach is employed: the teacher computes the target embeddings from each speaker's utterance before the utterances are added to form the mixture, and the student embedding extractor is then tasked to reproduce those embeddings from the speech mixture at its input. The system much more reliably verifies the presence or absence of a given speaker in a mixture than a conventional speaker embedding extractor, and even exhibits comparable performance to a multi-channel approach that exploits spatial information for embedding extraction. Further, it is shown that a speaker embedding computed from a mixture can be used to check for the presence of that speaker in another mixture.
The feasibility of artificial consciousness through the lens of neuroscience
Jun 01, 2023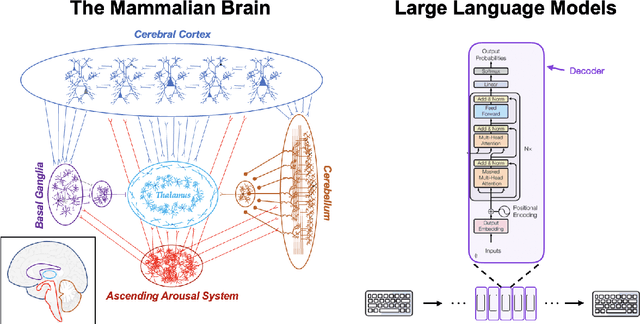
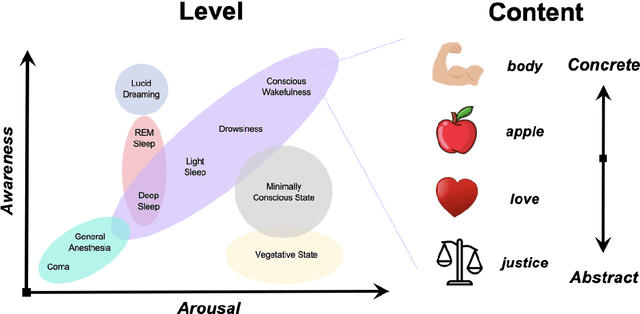
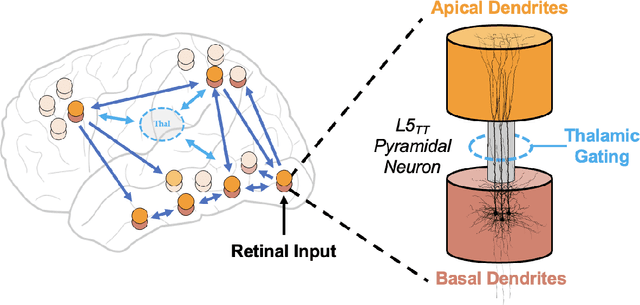
Interactions with large language models have led to the suggestion that these models may be conscious. From the perspective of neuroscience, this position is difficult to defend. For one, the architecture of large language models is missing key features of the thalamocortical system that have been linked to conscious awareness in mammals. Secondly, the inputs to large language models lack the embodied, embedded information content characteristic of our sensory contact with the world around us. Finally, while the previous two arguments can be overcome in future AI systems, the third one might be harder to bridge in the near future. Namely, we argue that consciousness might depend on having 'skin in the game', in that the existence of the system depends on its actions, which is not true for present-day artificial intelligence.
Translatotron 3: Speech to Speech Translation with Monolingual Data
Jun 01, 2023
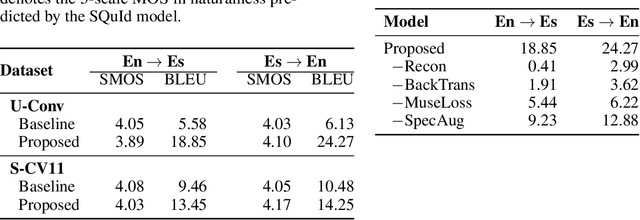
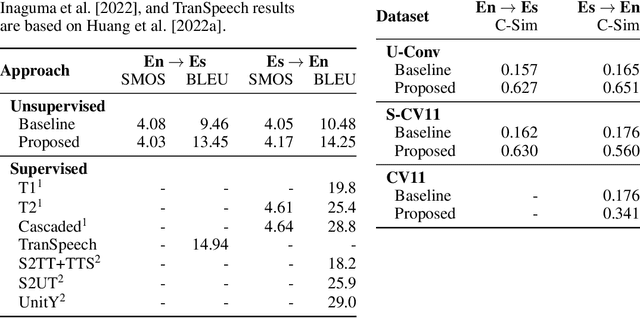

This paper presents Translatotron 3, a novel approach to train a direct speech-to-speech translation model from monolingual speech-text datasets only in a fully unsupervised manner. Translatotron 3 combines masked autoencoder, unsupervised embedding mapping, and back-translation to achieve this goal. Experimental results in speech-to-speech translation tasks between Spanish and English show that Translatotron 3 outperforms a baseline cascade system, reporting 18.14 BLEU points improvement on the synthesized Unpaired-Conversational dataset. In contrast to supervised approaches that necessitate real paired data, which is unavailable, or specialized modeling to replicate para-/non-linguistic information, Translatotron 3 showcases its capability to retain para-/non-linguistic such as pauses, speaking rates, and speaker identity. Audio samples can be found in our website http://google-research.github.io/lingvo-lab/translatotron3
Meta-Learning in Spiking Neural Networks with Reward-Modulated STDP
Jun 07, 2023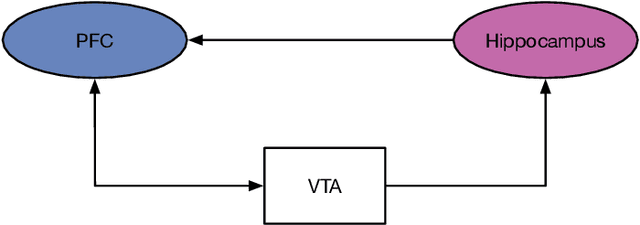
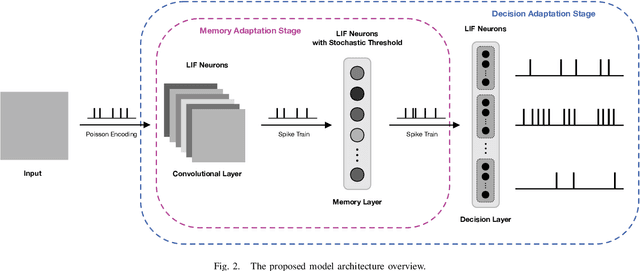

The human brain constantly learns and rapidly adapts to new situations by integrating acquired knowledge and experiences into memory. Developing this capability in machine learning models is considered an important goal of AI research since deep neural networks perform poorly when there is limited data or when they need to adapt quickly to new unseen tasks. Meta-learning models are proposed to facilitate quick learning in low-data regimes by employing absorbed information from the past. Although some models have recently been introduced that reached high-performance levels, they are not biologically plausible. We have proposed a bio-plausible meta-learning model inspired by the hippocampus and the prefrontal cortex using spiking neural networks with a reward-based learning system. Our proposed model includes a memory designed to prevent catastrophic forgetting, a phenomenon that occurs when meta-learning models forget what they have learned as soon as the new task begins. Also, our new model can easily be applied to spike-based neuromorphic devices and enables fast learning in neuromorphic hardware. The final analysis will discuss the implications and predictions of the model for solving few-shot classification tasks. In solving these tasks, our model has demonstrated the ability to compete with the existing state-of-the-art meta-learning techniques.
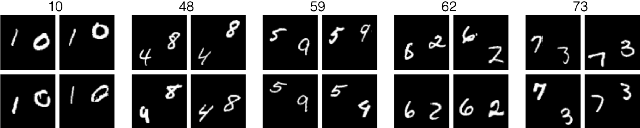
Understanding Place Identity with Generative AI
Jun 07, 2023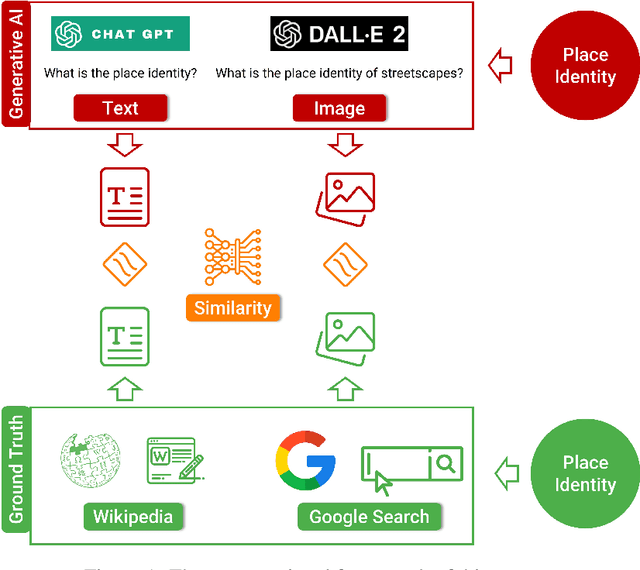
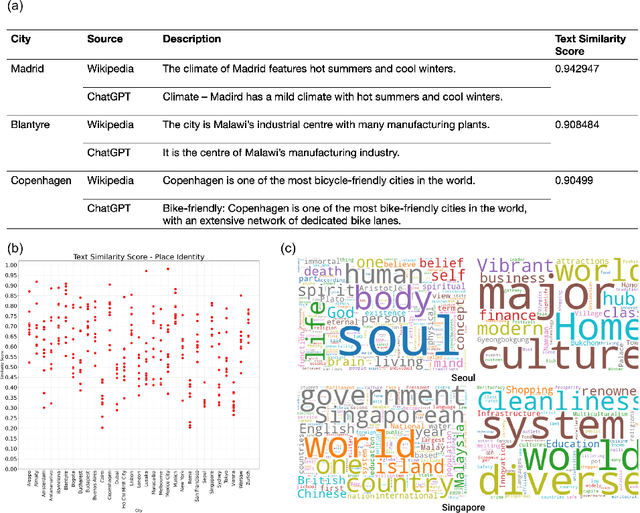
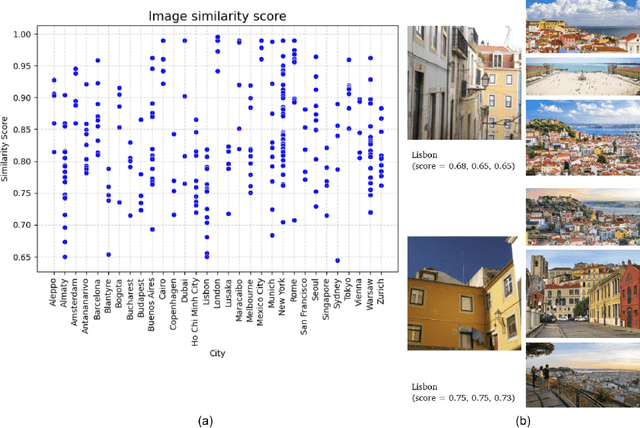
Researchers are constantly leveraging new forms of data with the goal of understanding how people perceive the built environment and build the collective place identity of cities. Latest advancements in generative artificial intelligence (AI) models have enabled the production of realistic representations learned from vast amounts of data. In this study, we aim to test the potential of generative AI as the source of textual and visual information in capturing the place identity of cities assessed by filtered descriptions and images. We asked questions on the place identity of a set of 31 global cities to two generative AI models, ChatGPT and DALL-E2. Since generative AI has raised ethical concerns regarding its trustworthiness, we performed cross-validation to examine whether the results show similar patterns to real urban settings. In particular, we compared the outputs with Wikipedia data for text and images searched from Google for image. Our results indicate that generative AI models have the potential to capture the collective image of cities that can make them distinguishable. This study is among the first attempts to explore the capabilities of generative AI in understanding human perceptions of the built environment. It contributes to urban design literature by discussing future research opportunities and potential limitations.
Multiscale Flow for Robust and Optimal Cosmological Analysis
Jun 07, 2023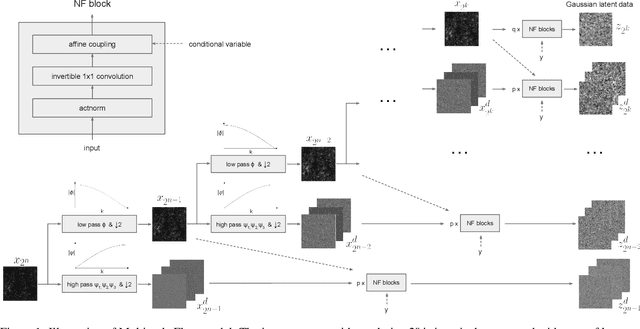
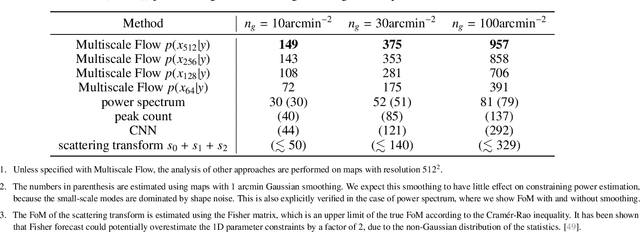
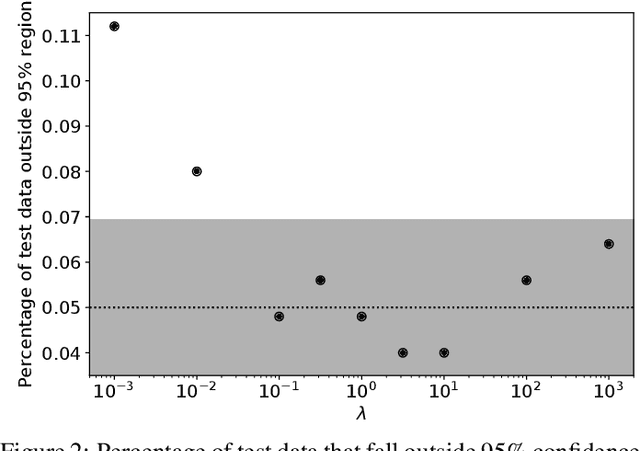
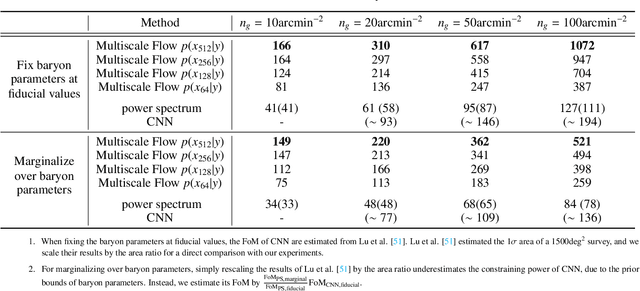
We propose Multiscale Flow, a generative Normalizing Flow that creates samples and models the field-level likelihood of two-dimensional cosmological data such as weak lensing. Multiscale Flow uses hierarchical decomposition of cosmological fields via a wavelet basis, and then models different wavelet components separately as Normalizing Flows. The log-likelihood of the original cosmological field can be recovered by summing over the log-likelihood of each wavelet term. This decomposition allows us to separate the information from different scales and identify distribution shifts in the data such as unknown scale-dependent systematics. The resulting likelihood analysis can not only identify these types of systematics, but can also be made optimal, in the sense that the Multiscale Flow can learn the full likelihood at the field without any dimensionality reduction. We apply Multiscale Flow to weak lensing mock datasets for cosmological inference, and show that it significantly outperforms traditional summary statistics such as power spectrum and peak counts, as well as novel Machine Learning based summary statistics such as scattering transform and convolutional neural networks. We further show that Multiscale Flow is able to identify distribution shifts not in the training data such as baryonic effects. Finally, we demonstrate that Multiscale Flow can be used to generate realistic samples of weak lensing data.
Towards Decentralized Heterogeneous Multi-Robot SLAM and Target Tracking
Jun 07, 2023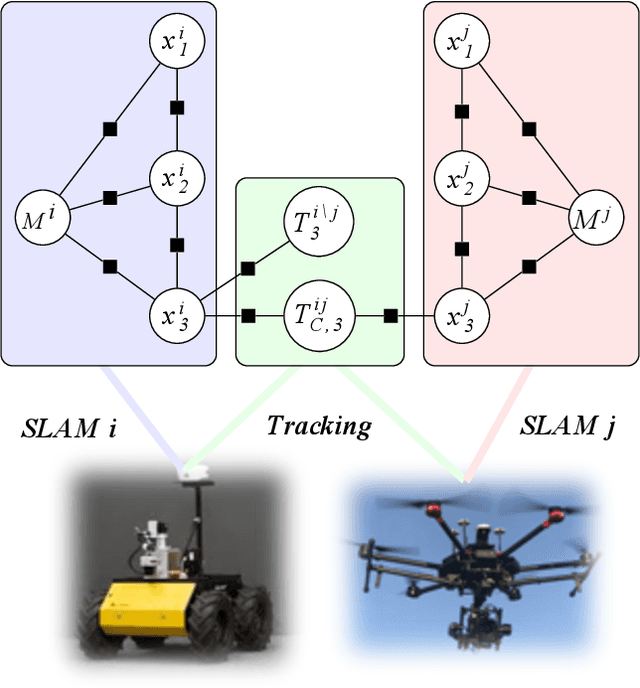
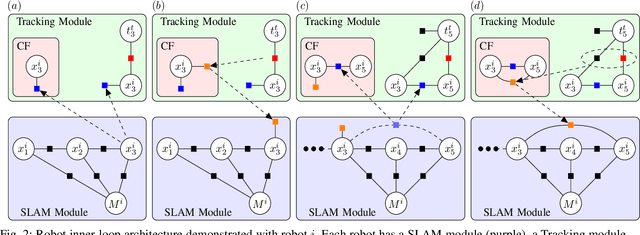
In many robotics problems, there is a significant gain in collaborative information sharing between multiple robots, for exploration, search and rescue, tracking multiple targets, or mapping large environments. One of the key implicit assumptions when solving cooperative multi-robot problems is that all robots use the same (homogeneous) underlying algorithm. However, in practice, we want to allow collaboration between robots possessing different capabilities and that therefore must rely on heterogeneous algorithms. We present a system architecture and the supporting theory, to enable collaboration in a decentralized network of robots, where each robot relies on different estimation algorithms. To develop our approach, we focus on multi-robot simultaneous localization and mapping (SLAM) with multi-target tracking. Our theoretical framework builds on our idea of exploiting the conditional independence structure inherent to many robotics applications to separate between each robot's local inference (estimation) tasks and fuse only relevant parts of their non-equal, but overlapping probability density function (pdfs). We present a new decentralized graph-based approach to the multi-robot SLAM and tracking problem. We leverage factor graphs to split between different parts of the problem for efficient data sharing between robots in the network while enabling robots to use different local sparse landmark/dense/metric-semantic SLAM algorithms.
Enabling tabular deep learning when $d \gg n$ with an auxiliary knowledge graph
Jun 07, 2023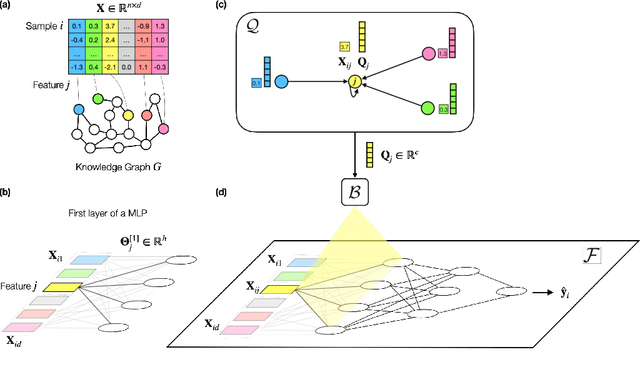

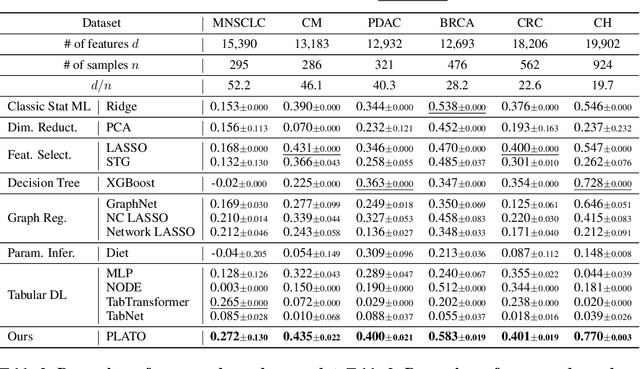
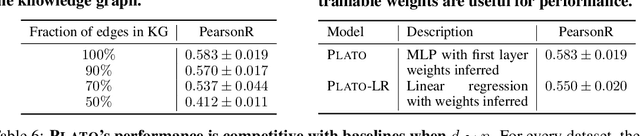
Machine learning models exhibit strong performance on datasets with abundant labeled samples. However, for tabular datasets with extremely high $d$-dimensional features but limited $n$ samples (i.e. $d \gg n$), machine learning models struggle to achieve strong performance due to the risk of overfitting. Here, our key insight is that there is often abundant, auxiliary domain information describing input features which can be structured as a heterogeneous knowledge graph (KG). We propose PLATO, a method that achieves strong performance on tabular data with $d \gg n$ by using an auxiliary KG describing input features to regularize a multilayer perceptron (MLP). In PLATO, each input feature corresponds to a node in the auxiliary KG. In the MLP's first layer, each input feature also corresponds to a weight vector. PLATO is based on the inductive bias that two input features corresponding to similar nodes in the auxiliary KG should have similar weight vectors in the MLP's first layer. PLATO captures this inductive bias by inferring the weight vector for each input feature from its corresponding node in the KG via a trainable message-passing function. Across 6 $d \gg n$ datasets, PLATO outperforms 13 state-of-the-art baselines by up to 10.19%.
Calculating and Visualizing Counterfactual Feature Importance Values
Jun 10, 2023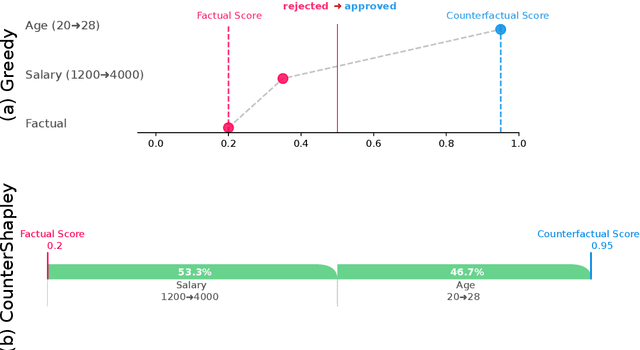
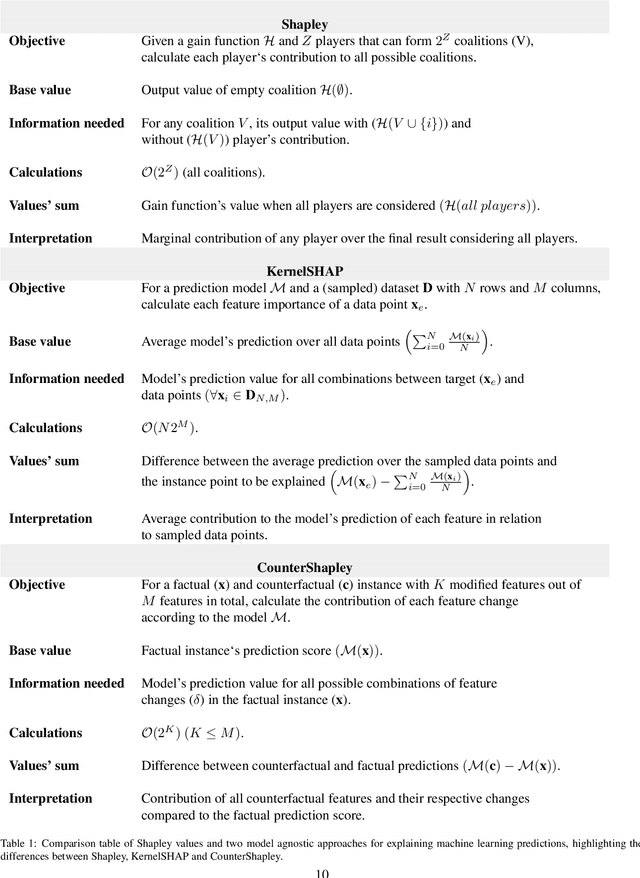
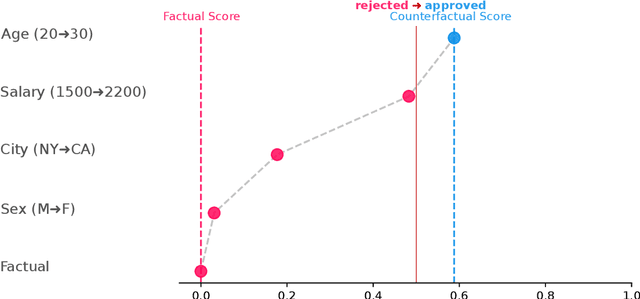

Despite the success of complex machine learning algorithms, mostly justified by an outstanding performance in prediction tasks, their inherent opaque nature still represents a challenge to their responsible application. Counterfactual explanations surged as one potential solution to explain individual decision results. However, two major drawbacks directly impact their usability: (1) the isonomic view of feature changes, in which it is not possible to observe \textit{how much} each modified feature influences the prediction, and (2) the lack of graphical resources to visualize the counterfactual explanation. We introduce Counterfactual Feature (change) Importance (CFI) values as a solution: a way of assigning an importance value to each feature change in a given counterfactual explanation. To calculate these values, we propose two potential CFI methods. One is simple, fast, and has a greedy nature. The other, coined CounterShapley, provides a way to calculate Shapley values between the factual-counterfactual pair. Using these importance values, we additionally introduce three chart types to visualize the counterfactual explanations: (a) the Greedy chart, which shows a greedy sequential path for prediction score increase up to predicted class change, (b) the CounterShapley chart, depicting its respective score in a simple and one-dimensional chart, and finally (c) the Constellation chart, which shows all possible combinations of feature changes, and their impact on the model's prediction score. For each of our proposed CFI methods and visualization schemes, we show how they can provide more information on counterfactual explanations. Finally, an open-source implementation is offered, compatible with any counterfactual explanation generator algorithm. Code repository at: https://github.com/ADMAntwerp/CounterPlots