 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSign Language Translation
Sign language translation is the process of converting sign language gestures into spoken or written language.
Papers and Code
M3T: Discrete Multi-Modal Motion Tokens for Sign Language Production
Mar 24, 2026Sign language production requires more than hand motion generation. Non-manual features, including mouthings, eyebrow raises, gaze, and head movements, are grammatically obligatory and cannot be recovered from manual articulators alone. Existing 3D production systems face two barriers to integrating them: the standard body model provides a facial space too low-dimensional to encode these articulations, and when richer representations are adopted, standard discrete tokenization suffers from codebook collapse, leaving most of the expression space unreachable. We propose SMPL-FX, which couples FLAME's rich expression space with the SMPL-X body, and tokenize the resulting representation with modality-specific Finite Scalar Quantization VAEs for body, hands, and face. M3T is an autoregressive transformer trained on this multi-modal motion vocabulary, with an auxiliary translation objective that encourages semantically grounded embeddings. Across three standard benchmarks (How2Sign, CSL-Daily, Phoenix14T) M3T achieves state-of-the-art sign language production quality, and on NMFs-CSL, where signs are distinguishable only by non-manual features, reaches 58.3% accuracy against 49.0% for the strongest comparable pose baseline.
Toward Phonology-Guided Sign Language Motion Generation: A Diffusion Baseline and Conditioning Analysis
Mar 18, 2026Generating natural, correct, and visually smooth 3D avatar sign language motion conditioned on the text inputs continues to be very challenging. In this work, we train a generative model of 3D body motion and explore the role of phonological attribute conditioning for sign language motion generation, using ASL-LEX 2.0 annotations such as hand shape, hand location and movement. We first establish a strong diffusion baseline using an Human Motion MDM-style diffusion model with SMPL-X representation, which outperforms SignAvatar, a state-of-the-art CVAE method, on gloss discriminability metrics. We then systematically study the role of text conditioning using different text encoders (CLIP vs. T5), conditioning modes (gloss-only vs. gloss+phonological attributes), and attribute notation format (symbolic vs. natural language). Our analysis reveals that translating symbolic ASL-LEX notations to natural language is a necessary condition for effective CLIP-based attribute conditioning, while T5 is largely unaffected by this translation. Furthermore, our best-performing variant (CLIP with mapped attributes) outperforms SignAvatar across all metrics. These findings highlight input representation as a critical factor for text-encoder-based attribute conditioning, and motivate structured conditioning approaches where gloss and phonological attributes are encoded through independent pathways.
Geometry-Aware Metric Learning for Cross-Lingual Few-Shot Sign Language Recognition on Static Hand Keypoints
Mar 10, 2026Sign language recognition (SLR) systems typically require large labeled corpora for each language, yet the majority of the world's 300+ sign languages lack sufficient annotated data. Cross-lingual few-shot transfer, pretraining on a data-rich source language and adapting with only a handful of target-language examples, offers a scalable alternative, but conventional coordinate-based keypoint representations are susceptible to domain shift arising from differences in camera viewpoint, hand scale, and recording conditions. This shift is particularly detrimental in the few-shot regime, where class prototypes estimated from only K examples are highly sensitive to extrinsic variance. We propose a geometry-aware metric-learning framework centered on a compact 20-dimensional inter-joint angle descriptor derived from MediaPipe static hand keypoints. These angles are invariant to SO(3) rotation, translation, and isotropic scaling, eliminating the dominant sources of cross-dataset shift and yielding tighter, more stable class prototypes. Evaluated on four fingerspelling alphabets spanning typologically diverse sign languages, ASL, LIBRAS, Arabic Sign Language, and Thai Sign Language, the proposed angle features improve over normalized-coordinate baselines by up to 25 percentage points within-domain and enable frozen cross-lingual transfer that frequently exceeds within-domain accuracy, using a lightweight MLP encoder with about 10^5 parameters. These findings demonstrate that invariant hand-geometry descriptors provide a portable and effective foundation for cross-lingual few-shot SLR in low-resource settings.
Beyond a Single Reference: Training and Evaluation with Paraphrases in Sign Language Translation
Jan 29, 2026Most Sign Language Translation (SLT) corpora pair each signed utterance with a single written-language reference, despite the highly non-isomorphic relationship between sign and spoken languages, where multiple translations can be equally valid. This limitation constrains both model training and evaluation, particularly for n-gram-based metrics such as BLEU. In this work, we investigate the use of Large Language Models to automatically generate paraphrased variants of written-language translations as synthetic alternative references for SLT. First, we compare multiple paraphrasing strategies and models using an adapted ParaScore metric. Second, we study the impact of paraphrases on both training and evaluation of the pose-based T5 model on the YouTubeASL and How2Sign datasets. Our results show that naively incorporating paraphrases during training does not improve translation performance and can even be detrimental. In contrast, using paraphrases during evaluation leads to higher automatic scores and better alignment with human judgments. To formalize this observation, we introduce BLEUpara, an extension of BLEU that evaluates translations against multiple paraphrased references. Human evaluation confirms that BLEUpara correlates more strongly with perceived translation quality. We release all generated paraphrases, generation and evaluation code to support reproducible and more reliable evaluation of SLT systems.
Experimentation Accelerator: Interpretable Insights and Creative Recommendations for A/B Testing with Content-Aware ranking
Feb 14, 2026Modern online experimentation faces two bottlenecks: scarce traffic forces tough choices on which variants to test, and post-hoc insight extraction is manual, inconsistent, and often content-agnostic. Meanwhile, organizations underuse historical A/B results and rich content embeddings that could guide prioritization and creative iteration. We present a unified framework to (i) prioritize which variants to test, (ii) explain why winners win, and (iii) surface targeted opportunities for new, higher-potential variants. Leveraging treatment embeddings and historical outcomes, we train a CTR ranking model with fixed effects for contextual shifts that scores candidates while balancing value and content diversity. For better interpretability and understanding, we project treatments onto curated semantic marketing attributes and re-express the ranker in this space via a sign-consistent, sparse constrained Lasso, yielding per-attribute coefficients and signed contributions for visual explanations, top-k drivers, and natural-language insights. We then compute an opportunity index combining attribute importance (from the ranker) with under-expression in the current experiment to flag missing, high-impact attributes. Finally, LLMs translate ranked opportunities into concrete creative suggestions and estimate both learning and conversion potential, enabling faster, more informative, and more efficient test cycles. These components have been built into a real Adobe product, called \textit{Experimentation Accelerator}, to provide AI-based insights and opportunities to scale experimentation for customers. We provide an evaluation of the performance of the proposed framework on some real-world experiments by Adobe business customers that validate the high quality of the generation pipeline.
A$^{2}$V-SLP: Alignment-Aware Variational Modeling for Disentangled Sign Language Production
Feb 12, 2026Building upon recent structural disentanglement frameworks for sign language production, we propose A$^{2}$V-SLP, an alignment-aware variational framework that learns articulator-wise disentangled latent distributions rather than deterministic embeddings. A disentangled Variational Autoencoder (VAE) encodes ground-truth sign pose sequences and extracts articulator-specific mean and variance vectors, which are used as distributional supervision for training a non-autoregressive Transformer. Given text embeddings, the Transformer predicts both latent means and log-variances, while the VAE decoder reconstructs the final sign pose sequences through stochastic sampling at the decoding stage. This formulation maintains articulator-level representations by avoiding deterministic latent collapse through distributional latent modeling. In addition, we integrate a gloss attention mechanism to strengthen alignment between linguistic input and articulated motion. Experimental results show consistent gains over deterministic latent regression, achieving state-of-the-art back-translation performance and improved motion realism in a fully gloss-free setting.
MaDiS: Taming Masked Diffusion Language Models for Sign Language Generation
Jan 27, 2026Sign language generation (SLG) aims to translate written texts into expressive sign motions, bridging communication barriers for the Deaf and Hard-of-Hearing communities. Recent studies formulate SLG within the language modeling framework using autoregressive language models, which suffer from unidirectional context modeling and slow token-by-token inference. To address these limitations, we present MaDiS, a masked-diffusion-based language model for SLG that captures bidirectional dependencies and supports efficient parallel multi-token generation. We further introduce a tri-level cross-modal pretraining scheme that jointly learns from token-, latent-, and 3D physical-space objectives, leading to richer and more grounded sign representations. To accelerate model convergence in the fine-tuning stage, we design a novel unmasking strategy with temporal checkpoints, reducing the combinatorial complexity of unmasking orders by over $10^{41}$ times. In addition, a mixture-of-parts embedding layer is developed to effectively fuse information stored in different part-wise sign tokens through learnable gates and well-optimized codebooks. Extensive experiments on CSL-Daily, Phoenix-2014T, and How2Sign demonstrate that MaDiS achieves superior performance across multiple metrics, including DTW error and two newly introduced metrics, SiBLEU and SiCLIP, while reducing inference latency by nearly 30%. Code and models will be released on our project page.
EASLT: Emotion-Aware Sign Language Translation
Jan 07, 2026Sign Language Translation (SLT) is a complex cross-modal task requiring the integration of Manual Signals (MS) and Non-Manual Signals (NMS). While recent gloss-free SLT methods have made strides in translating manual gestures, they frequently overlook the semantic criticality of facial expressions, resulting in ambiguity when distinct concepts share identical manual articulations. To address this, we present **EASLT** (**E**motion-**A**ware **S**ign **L**anguage **T**ranslation), a framework that treats facial affect not as auxiliary information, but as a robust semantic anchor. Unlike methods that relegate facial expressions to a secondary role, EASLT incorporates a dedicated emotional encoder to capture continuous affective dynamics. These representations are integrated via a novel *Emotion-Aware Fusion* (EAF) module, which adaptively recalibrates spatio-temporal sign features based on affective context to resolve semantic ambiguities. Extensive evaluations on the PHOENIX14T and CSL-Daily benchmarks demonstrate that EASLT establishes advanced performance among gloss-free methods, achieving BLEU-4 scores of 26.15 and 22.80, and BLEURT scores of 61.0 and 57.8, respectively. Ablation studies confirm that explicitly modeling emotion effectively decouples affective semantics from manual dynamics, significantly enhancing translation fidelity. Code is available at https://github.com/TuGuobin/EASLT.
CSF: Contrastive Semantic Features for Direct Multilingual Sign Language Generation
Jan 05, 2026Sign language translation systems typically require English as an intermediary language, creating barriers for non-English speakers in the global deaf community. We present Canonical Semantic Form (CSF), a language-agnostic semantic representation framework that enables direct translation from any source language to sign language without English mediation. CSF decomposes utterances into nine universal semantic slots: event, intent, time, condition, agent, object, location, purpose, and modifier. A key contribution is our comprehensive condition taxonomy comprising 35 condition types across eight semantic categories, enabling nuanced representation of conditional expressions common in everyday communication. We train a lightweight transformer-based extractor (0.74 MB) that achieves 99.03% average slot extraction accuracy across four typologically diverse languages: English, Vietnamese, Japanese, and French. The model demonstrates particularly strong performance on condition classification (99.4% accuracy) despite the 35-class complexity. With inference latency of 3.02ms on CPU, our approach enables real-time sign language generation in browser-based applications. We release our code, trained models, and multilingual dataset to support further research in accessible sign language technology.
Lost in Translation, Found in Embeddings: Sign Language Translation and Alignment
Dec 08, 2025


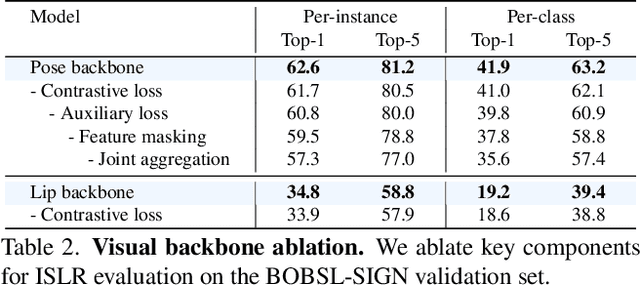
Our aim is to develop a unified model for sign language understanding, that performs sign language translation (SLT) and sign-subtitle alignment (SSA). Together, these two tasks enable the conversion of continuous signing videos into spoken language text and also the temporal alignment of signing with subtitles -- both essential for practical communication, large-scale corpus construction, and educational applications. To achieve this, our approach is built upon three components: (i) a lightweight visual backbone that captures manual and non-manual cues from human keypoints and lip-region images while preserving signer privacy; (ii) a Sliding Perceiver mapping network that aggregates consecutive visual features into word-level embeddings to bridge the vision-text gap; and (iii) a multi-task scalable training strategy that jointly optimises SLT and SSA, reinforcing both linguistic and temporal alignment. To promote cross-linguistic generalisation, we pretrain our model on large-scale sign-text corpora covering British Sign Language (BSL) and American Sign Language (ASL) from the BOBSL and YouTube-SL-25 datasets. With this multilingual pretraining and strong model design, we achieve state-of-the-art results on the challenging BOBSL (BSL) dataset for both SLT and SSA. Our model also demonstrates robust zero-shot generalisation and finetuned SLT performance on How2Sign (ASL), highlighting the potential of scalable translation across different sign languages.