 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLOCUS 2.0: Robust and Computationally Efficient Lidar Odometry for Real-Time Underground 3D Mapping
Paper and Code

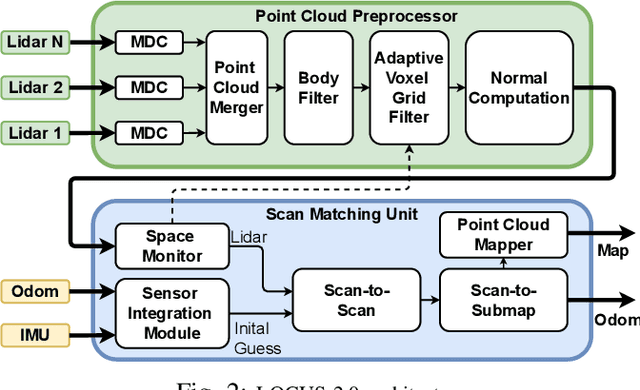
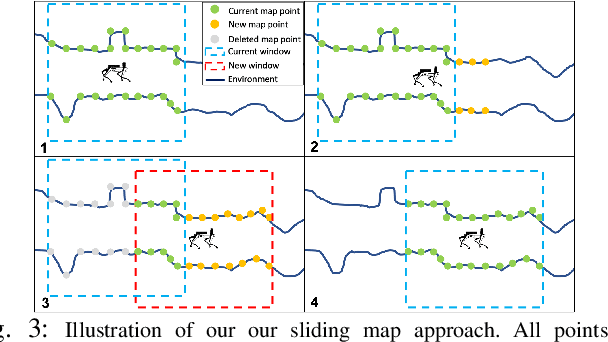
Lidar odometry has attracted considerable attention as a robust localization method for autonomous robots operating in complex GNSS-denied environments. However, achieving reliable and efficient performance on heterogeneous platforms in large-scale environments remains an open challenge due to the limitations of onboard computation and memory resources needed for autonomous operation. In this work, we present LOCUS 2.0, a robust and computationally-efficient \lidar odometry system for real-time underground 3D mapping. LOCUS 2.0 includes a novel normals-based \morrell{Generalized Iterative Closest Point (GICP)} formulation that reduces the computation time of point cloud alignment, an adaptive voxel grid filter that maintains the desired computation load regardless of the environment's geometry, and a sliding-window map approach that bounds the memory consumption. The proposed approach is shown to be suitable to be deployed on heterogeneous robotic platforms involved in large-scale explorations under severe computation and memory constraints. We demonstrate LOCUS 2.0, a key element of the CoSTAR team's entry in the DARPA Subterranean Challenge, across various underground scenarios. We release LOCUS 2.0 as an open-source library and also release a \lidar-based odometry dataset in challenging and large-scale underground environments. The dataset features legged and wheeled platforms in multiple environments including fog, dust, darkness, and geometrically degenerate surroundings with a total of $11~h$ of operations and $16~km$ of distance traveled.